Файл: Создание электронного учебного курса Разработка, моделирование и программирование мехатронных устройств.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 44
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Pн,
н,
nн,
nxx,
kм.
(13.9)
-
Выбор передаточных механизмов. Основным назначением передаточного механизма является согласование скорости вала двигателя (высокой) со скоростью исполнительного звена (низкой).
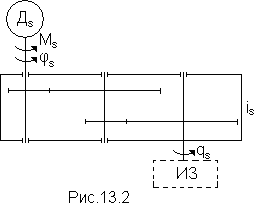 Во вращательной кинематической паре передача
Во вращательной кинематической паре передачавращательного движения s вала
двигателя Дs
движению qs
к вращательному исполнительного
звена ИЗ осуществляется посредством редуктора с
передаточным числом is
(рис.13.2).
Из условия согласования номинальной скорости двигателя
ɺsн = sн
с максимальной скоростью
(qɺsп) max звена вытекает формула
для передаточного числа редуктора:
is
sн .
(qɺsп) max
(13.10)
В поступательной кинематической паре передача
вращательного движения s вала двигателя к поступательному
перемещению
qs исполнительного звена может осуществляться
разными видами механизмов: передача типа «винт - гайка», зубчато - реечная передача, и т.п. Для определенности будем рассматривать зубчато - реечную передачу (рис.13.3), в которой Rs – радиус
зубчатого колеса передачи; is – передаточное число редуктора. Из
условия согласования скоростей
sн = is(qɺsп )max / Rs
следует
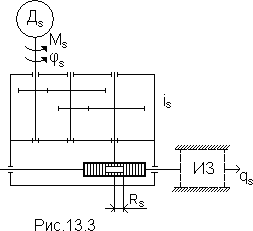 соотношение для, так называемого, передаточного параметра передачи:
соотношение для, так называемого, передаточного параметра передачи:is
Rs
sн , (qɺsп) max
(13.11)
в котором одним из параметров, is
или Rs, следует задаться.
предусматривается.
Заметим, что более подробная детализация задачи выбора передаточных механизмов, чем расчеты по формулам (13.10) (13.11), в курсовой работе не
-
Проверка двигателей по моменту. Электродвигатели, используемые в приводных механизмах роботов, обладают, как правило, большим значением коэффициента перегрузки по моменту
k max
м н
(4 12)
(13.12)
Поэтому часто именно по величине параметра
kм , а не по
мощности (Psп )max , производится окончательный выбор двигателя.
При вычислении максимального программного момента
двигателя
( sп )max
будем, для простоты, пренебрегать составляющей
момента, идущего на преодоление сил инерции элементов передаточного механизма. Тогда имеем:
а) для вращательной кинематической пары
( sп
) max
1
sпis
(Qдsп
) max;
(13.13)
б) для поступательной кинематической пары
( sп
) max
R s
sпis
(Qдsп
) max.
(13.14)
По результатам сравнения отношения
kм ( sп )max / н с
каталожным значением двигателя.
kм делается вывод о пригодности выбранного
В случае, если двигатель имеет большой запас по моменту,
выбирается двигатель меньшей мощности. Попытки заканчиваются
при достижении kм
значения, близкого к каталожному.
-
ВЫБОР МИКРОКОНТРОЛЛЕРА
Сегодня существует множество уже готовых контроллерных плат с размещенными на них микроконтроллерами и средствами загрузки программ. Такие платы предназначены как для оценки работы с микроконтроллером (называются оценочными платами), так могут работать и в рамках законченного устройства.
Рассмотрим несколько популярных решений, базирующихся на микроконтроллерах известных производителей.
NodeMCU (ESP8266)
П
 лата, на которой установлен микроконтроллерный модуль ESP8266 с процессором Tensilica Xtensa L106, работающим на частоте 80 МГц (можно разогнать до 160 МГц). Плата имеет 4 мегабайта Flash-памяти. Размер NodeMCU всего 6 х 3 см. NodeMCU умеет работать с локальной сетью или с интернетом через Wi-Fi. Программы загружаются через разъем Micro USB на плате. Наличие интерфейса UART-USB позволяет легко подключить плату к компьютеру. NodeMCU может программироваться на языке Си. Существует множество прошивок, дающих возможность писать программы для ESP8266 на языках высокого уровня: Lua, MicroPython, JavaScript, Basic, Лисп. Кроме того, написаны специальные прошивки для интернета вещей и домашней автоматизации. NodeMCU часто используется для создания систем умного дома или роботов, управляемых на расстоянии.
лата, на которой установлен микроконтроллерный модуль ESP8266 с процессором Tensilica Xtensa L106, работающим на частоте 80 МГц (можно разогнать до 160 МГц). Плата имеет 4 мегабайта Flash-памяти. Размер NodeMCU всего 6 х 3 см. NodeMCU умеет работать с локальной сетью или с интернетом через Wi-Fi. Программы загружаются через разъем Micro USB на плате. Наличие интерфейса UART-USB позволяет легко подключить плату к компьютеру. NodeMCU может программироваться на языке Си. Существует множество прошивок, дающих возможность писать программы для ESP8266 на языках высокого уровня: Lua, MicroPython, JavaScript, Basic, Лисп. Кроме того, написаны специальные прошивки для интернета вещей и домашней автоматизации. NodeMCU часто используется для создания систем умного дома или роботов, управляемых на расстоянии.Arduino Uno R3
П
 лата из семейства Arduino, ориентированного на непрофессиональных пользователей. Программирование встроенного микроконтроллера ATmega328 от Atmel производится на специальном языке Arduino с помощью бесплатной среды программирования Arduino IDE. Uno R3 имеет 32 КБ памяти для программ, 2 КБ ОЗУ и 1 КБ энергонезависимой памяти EEPROM. Программы для Arduino называются скетчами. При загрузке скетча используется Загрузчик Arduino — небольшая программа, заранее загруженная в микроконтроллер на плате. Запрограммировать Arduino Uno R3 можно просто подключив плату к компьютеру обычным USB-кабелем. Для китайских клонов Arduino необходимо установить драйвер CH340.
лата из семейства Arduino, ориентированного на непрофессиональных пользователей. Программирование встроенного микроконтроллера ATmega328 от Atmel производится на специальном языке Arduino с помощью бесплатной среды программирования Arduino IDE. Uno R3 имеет 32 КБ памяти для программ, 2 КБ ОЗУ и 1 КБ энергонезависимой памяти EEPROM. Программы для Arduino называются скетчами. При загрузке скетча используется Загрузчик Arduino — небольшая программа, заранее загруженная в микроконтроллер на плате. Запрограммировать Arduino Uno R3 можно просто подключив плату к компьютеру обычным USB-кабелем. Для китайских клонов Arduino необходимо установить драйвер CH340.S
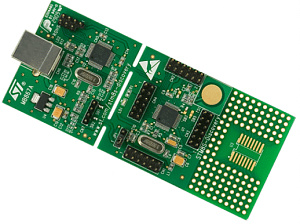 TM8S-Discovery
TM8S-DiscoveryОфициальная отладочная плата от STMicroelectronics с 8-разрядным микроконтроллером STM8S105C6T6. Имеет 32 КБ Flash-памяти для программ, 2 КБ оперативной памяти, 1 КБ энергонезависимой памяти EEPROM; пользовательский светодиод и сенсорные кнопки, а также удобную макетную площадку для монтажа дополнительных элементов схемы. В плату интегрирован программатор/отладчик ST-Link, позволяющий загружать программы в память микроконтроллера, подключив плату к порту USB. Программатор может быть легко отделен от платы, а плата может использоваться в законченном устройстве.
S
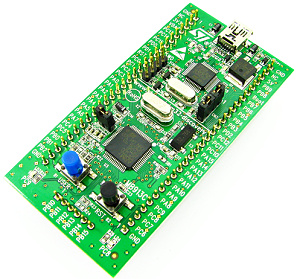 TM32VL-Discovery
TM32VL-DiscoveryМощная отладочная плата от ST имеет на борту программатор/отладчик ST-LINK и производительный 32-разрядный ARM-микроконтроллер STM32F100RBT со 128 КБ Flash-памяти и 8 КБ ОЗУ. На плате присутствуют два пользовательских светодиода и кнопка. Часто рекомендуется в качестве начального средства для знакомства с ARM-микроконтроллерами на ядре Cortex-M3.
MSP430 LaunchPad
П
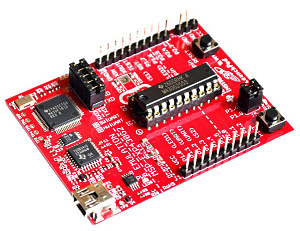 лата от Texas Instruments для быстрого знакомства с 16-разрядными микроконтроллерами MSP430. Поставляется с установленным микроконтроллером MSP430G2553 (16 КБ Flash-памяти для программ, 512 Байт ОЗУ) и дополнительным MSP430G2452. Для составления программ на языке Си можно использовать бесплатную Code Composer Studio от производителя платы. Кроме того, существует бесплатная ардуиноподобная среда Energia. В своей работе я буду использовать этот микроконтроллер.
лата от Texas Instruments для быстрого знакомства с 16-разрядными микроконтроллерами MSP430. Поставляется с установленным микроконтроллером MSP430G2553 (16 КБ Flash-памяти для программ, 512 Байт ОЗУ) и дополнительным MSP430G2452. Для составления программ на языке Си можно использовать бесплатную Code Composer Studio от производителя платы. Кроме того, существует бесплатная ардуиноподобная среда Energia. В своей работе я буду использовать этот микроконтроллер.ПРИЛОЖЕНИЯ
Приложение П 1. Электродвигатели постоянного тока,
используемые в промышленных роботах
| Тип | Номинальный момент | Номинальная мощность | Номинальная частота вращения | Скорость холостого хода | Перегрузка по моменту | Масса |
| Нм | кВт | об/мин | об/мин | - | кг | |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| ДП-35 | 0,06 | 0,025 | 4000 | 5000 | 3,6 | 0,9 |
| ДП-40 | 0,09 | 0,04 | 4250 | 5000 | 4,5 | 1,1 |
| ДП-50 | 0,14 | 0,06 | 4080 | 5000 | 5,8 | 2,0 |
| ДП-60 | 0,21 | 0,09 | 4080 | 5000 | 7,5 | 2,0 |
| ДПУ-160 | 0,5 | 0,18 | 3440 | 5000 | 5 | 13,0 |
| ДПУ-200 | 1,7 | 0,55 | 3100 | 5000 | 5 | 18,0 |
| ДПУ-240 | 3,5 | 1,1 | 3000 | 5000 | 5 | 23,0 |
| ДКI-1,7 | 1,7 | 0,17 | 955 | 1200 | 4,1 | 12,7 |
| ДКI-2,3 | 2,3 | 0,23 | 955 | 1200 | 4,1 | 15,5 |
| ДКI-3,5 | 3,5 | 0,35 | 955 | 1200 | 5,2 | 18,2 |
| ДКI-5,2 | 5,2 | 0,52 | 955 | 1200 | 6 | 23,7 |
| ПБВ-100М | 7,16 | 0,75 | 1000 | 1200 | 9 | 29 |
| ПБВ-100 | 10,5 | 1,1 | 1000 | 1200 | 9 | 35 |
| ПБВ112 | 14 | 1,1 | 750 | 860 | 9 | 45 |
| ПБВ-112М | 17,5 | 1,1 | 600 | 870 | 10 | 51 |
| ПБВ-114 | 21 | 1,1 | 500 | 780 | 10 | 57 |
| СМУ-180 | 0,57 | 0,18 | 3000 | 3500 | 7,8 | 7,5 |
| СМУ-370 | 1,18 | 0,37 | 3000 | 3500 | 7,8 | 10,5 |
| СМУ-750 | 2,38 | 0,75 | 3000 | 3500 | 8,2 | 17 |
| СМУ-1200 | 3,82 | 1,2 | 3000 | 3500 | 8,5 | 20 |
| СМУ-1500 | 4,78 | 1,5 | 3000 | 3500 | 8,7 | 25 |
| СМУ-2200 | 7,0 | 2,2 | 3000 | 3500 | 9,5 | 28 |
| СМУ-4000 | 12,7 | 4,0 | 3000 | 3500 | 10 | 52 |
| СМУ-5500 | 17,5 | 5,5 | 3000 | 3500 | 11,5 | 55 |
| 90S-A | 10 | 2,5 | 2390 | 2870 | 11,2 | 32 |
| 90M-A | 13 | 3,25 | 2390 | 2870 | 11,2 | 36 |
| 90L-A | 17 | 4,25 | 2390 | 2870 | 11,3 | 38 |
| 112S-A | 21 | 4,2 | 2390 | 2870 | 11,5 | 55 |
| 112M-A | 28 | 5,6 | 1910 | 2390 | 11,5 | 62 |
| 112L-A | 42 | 8,4 | 1910 | 2390 | 11,8 | 76 |
| 160S-A | 56 | 11,2 | 1910 | 2390 | 11,8 | 147 |
| 160M-A | 85 | 17,0 | 1910 | 2390 | 11,8 | 165 |
| 160L-A | 125 | 22,5 | 1720 | 2480 | 12,5 | 182 |