Файл: Функциональная схема сау пример системы регулирования температуры.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 27
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Функциональная схема САУ
Пример системы регулирования температуры
На Рис. 87 показана блок схема системы регулирования температуры в объекте, а на Рис. 88 функциональная схема САР, показывающая общий принцип работы любой системы автоматического регулирования.
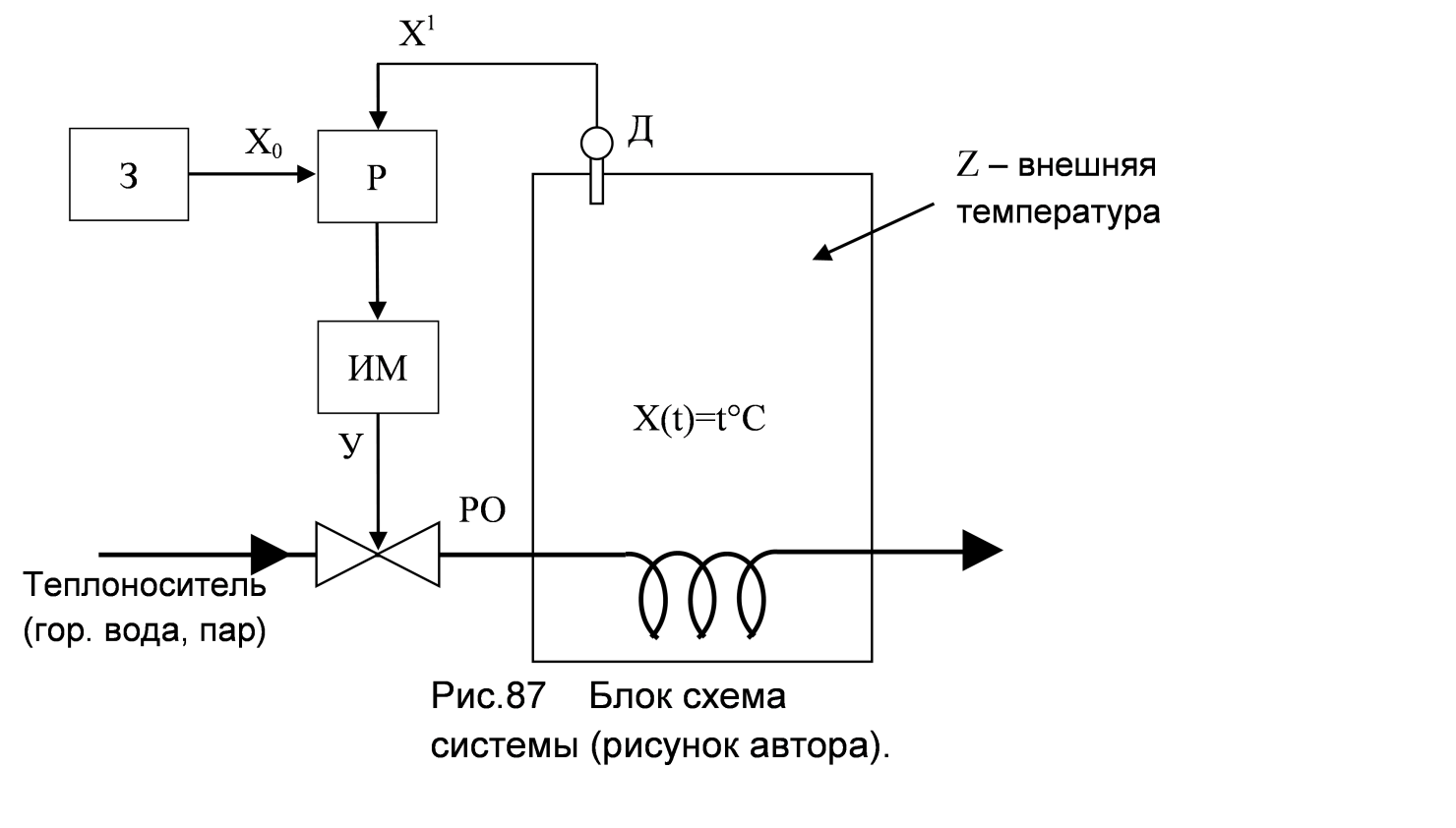
Если температура в объекте равна заданной, то сигнал с датчика X1 равен сигналу с задатчика X0 и сигнал ошибки на входе регулятора е = X1 - X0 = 0, сигнала на выходе регулятора нет, ИМ не работает и клапан открыт на заданную величину, поддерживая заданную температуру. Если, например, температура в объекте увеличиться, увеличиться сигнал с датчика X1, возникнет ошибка «е», заработает ИМ и, прикроет клапан РО для уменьшения подачи тепла, температура в объекте уменьшится до заданной.
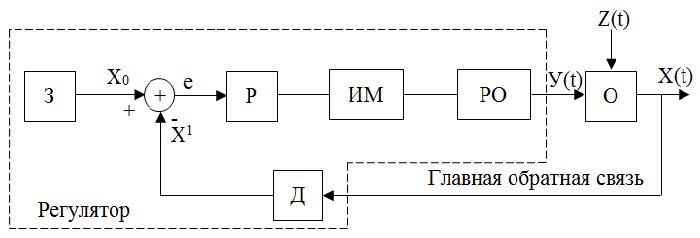
Рис. 88 Функциональная схема САР
З – задатчик, для установки заданного значения параметра X0
Д – датчик (термопара, терморезистор, датчик уровня, скорости и др. для разных систем)
Р – регулятор
ИМ – исполнительный механизм (эл. мотор с редуктором, пневмоцилиндры и др.)
РО – регулирующий орган (кран, вентиль, заслонка и др.)
О – объект регулирования (печь, эл. мотор, резервуар и др.)
У – регулирующее (управляющее) воздействие
Z – помеха (возмущение)
Х – регулируемый параметр
X1– сигнал на выходе датчика
е = X1- X0 ошибка, возникает при отклонении параметра от задания
X0 – заданное значение регулируемого (управляемого) параметра может быть постоянным X0 или изменяемым (Ut).
Сигнал с задатчика может быть:
-постоянным X0
= const. для поддержание постоянства регулируеФмого параметра температуры, давления, уровня жидкости и т. д. (системы стабилизации);
-может изменяться во времени U(t) по определённой программе (программное регулирование);
-может изменяться во времени U(t) в соответствии с измеряемым внешним процессом (следящее регулирование).
Контрольные вопросы
1.От каких воздействий может измениться регулируемый параметр?
2.Как действует обратная связь, и для чего она нужна?
3.Какие функции выполняют Д и ИМ?
4.Как действует система при возникновении ошибки «е»?
5.Приведите пример системы стабилизации и следящей системы?