Файл: Используя представленную методику, необходимо сделать структурный анализ схемы двигателя с прицепным шатуном.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 90
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
М ИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯРОССИЙСКОЙ ФЕДЕРАЦИИфедеральное государственное бюджетное образовательное учреждениевысшего образования«Тольяттинский государственный университет»(наименование института полностью)Кафедра /департамент /центр __________________________________________________(наименование кафедры/департамента/центра полностью)(код и наименование направления подготовки, специальности)(направленность (профиль) / специализация)Практическое задание № 1 по учебному курсу « Механика 3 »(наименование учебного курса)Вариант 12
Тольятти 2023
Входным звеном является кулачок 1, совершающий вращательное движение, выходным звеном – ползун 8, совершающий поступательное движение.Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Кинематическая пара в зависимости от характера соприкосновения звеньев может быть низшей или высшей.Характеристику кинематических пар приведем в таблице 1.1.Таблица 1.1Характеристика кинематических пар

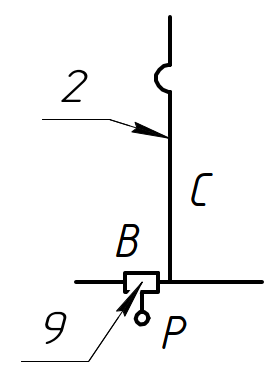
Число степеней свободы плоского механизма, то есть число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по формуле Чебышева: ,где – число подвижных звеньев механизма; – количество одноподвижных кинематических пар 5 класса; – количество двухподвижных кинематических пар 4 класса.Ролик 7 имеет местную подвижность, не влияющую на подвижность всего механизма, поэтому его не учитываем в расчётах. .Механизм имеет кинематическую пару 4 класса. Поэтому заменяем её кинематической цепью, состоящей из пар пятого класса. Схема замещающего механизма представлена на рис. 1.Рис. 1Число степеней свободы полученного механизма: .Разложим механизм на группы Ассура и определим их класс и порядок.Характеристику групп Ассура и начального звена приведем в таблице 1.2.Таблица 1.2Характеристика групп Ассура
Структурная формула образования механизма: , механизм II класса.
| Студент | (И.О. Фамилия) | |
| Группа | | |
| Преподаватель | (И.О. Фамилия) | |
Задание 1
Используя представленную методику, необходимо сделать структурный анализ схемы двигателя с прицепным шатуном. При выполнении задания студент должен:-
Ознакомиться с представленным на кинематической схеме механизмом. Определить его функциональное назначение и соответственно определить входное и выходное звено. -
Назвать звенья по характеру движения и записать их в виде спецификации рядом с кинематической схемой. -
Характеристику кинематических пар записать в таблицу 1.1. -
Определить число степеней свободы механизма. -
Разложить механизм на группы Ассура и результаты занести в таблицу 1.2. -
Записать структурную формулу образования механизма.
| Кинематическая схема | Звенья механизма |
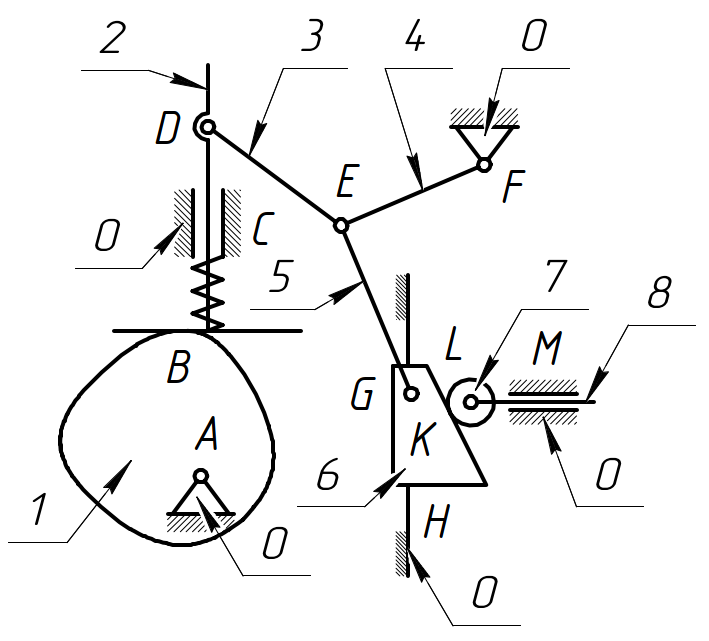 | 0 – стойка 1 – кулачок 2 – толкатель 3 – шатун 4 – коромысло 5 – шатун 6 – ползун 7 – ролик 8 – ползун |
Входным звеном является кулачок 1, совершающий вращательное движение, выходным звеном – ползун 8, совершающий поступательное движение.Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Кинематическая пара в зависимости от характера соприкосновения звеньев может быть низшей или высшей.Характеристику кинематических пар приведем в таблице 1.1.Таблица 1.1Характеристика кинематических пар
| Обозначение пары | Звенья, образующие пару | Подвижность пары (одно- /двухподвижная), класс пары. | Характеристика пары (высшая/низшая; вращательная/поступательная) |
| А01 | стойка – кулачок | одноподвижная, 5 класс (Р5) | низшая, вращательная |
| B12 | кулачок – толкатель | двухподвижная, 4 класс (Р4) | высшая, вращательно- поступательная |
| C02 | стойка – толкатель | одноподвижная, 5 класс (Р5) | низшая, поступательная |
| D23 | толкатель – шатун | одноподвижная, 5 класс (Р5) | низшая, вращательная |
| E34 | шатун – коромысло | одноподвижная, 5 класс (Р5) | низшая, вращательная |
| F04 | стойка – коромысло | одноподвижная, 5 класс (Р5) | низшая, вращательная |
| E45 | коромысло – шатун | одноподвижная, 5 класс (Р5) | низшая, вращательная |
| G56 | шатун – ползун | одноподвижная, 5 класс (Р5) | низшая, вращательная |
| H06 | стойка – ползун | одноподвижная, 5 класс (Р5) | низшая, поступательная |
| K67 | ползун – ролик | двухподвижная, 4 класс (Р4) | высшая, вращательно- поступательная |
| L78 | ролик – ползун | одноподвижная, 5 класс (Р5) | низшая, вращательная |
| M08 | стойка – ползун | одноподвижная, 5 класс (Р5) | низшая, поступательная |
Число степеней свободы плоского механизма, то есть число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по формуле Чебышева: ,где – число подвижных звеньев механизма; – количество одноподвижных кинематических пар 5 класса; – количество двухподвижных кинематических пар 4 класса.Ролик 7 имеет местную подвижность, не влияющую на подвижность всего механизма, поэтому его не учитываем в расчётах. .Механизм имеет кинематическую пару 4 класса. Поэтому заменяем её кинематической цепью, состоящей из пар пятого класса. Схема замещающего механизма представлена на рис. 1.Рис. 1Число степеней свободы полученного механизма: .Разложим механизм на группы Ассура и определим их класс и порядок.Характеристику групп Ассура и начального звена приведем в таблице 1.2.Таблица 1.2Характеристика групп Ассура
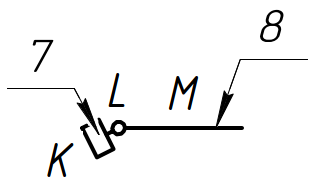 | Группа Ассура №1 класс – II порядок – 2 |
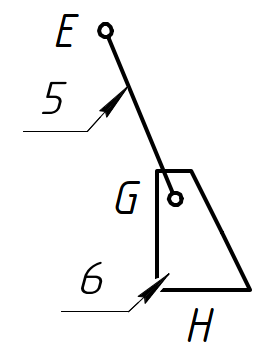 | Группа Ассура №2 класс – II порядок – 2 |
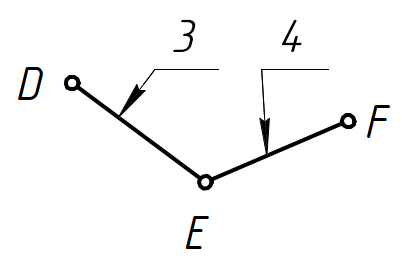 | Группа Ассура №3 класс – II порядок – 2 |
 | Группа Ассура №4 класс – II порядок – 2 |
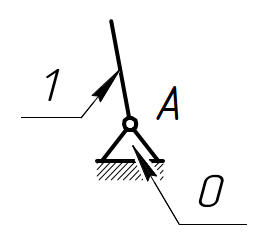 | Исходный механизм класс – I |
Структурная формула образования механизма: , механизм II класса.