Добавлен: 30.11.2023
Просмотров: 128
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
К первой группе приборов и устройств ГСП относятся первичные измерительные преобразователи (датчики), измерительные приборы и устройства, которые вместе с нормирующими устройствами, формирующими унифицированный сигнал, образуют группу устройств получения измерительной информации. В связи с большим разнообразием контролируемых и измеряемых параметров, а также огромным количеством конструктивных исполнений измерительных устройств номенклатура средств этой группы является самой многочисленной.
Во вторую группу, входят различные преобразователи сигналов и кодов, коммутаторы измерительных цепей, шифраторы и дешифраторы, согласовательные устройства, а также устройства дистанционной передачи, телеизмерения, телесигнализации и телеуправления.
В третью группу устройств, называемую центральной частью ГСП, входят технические средства, предназначенные для формальной и содержательной обработки измерительной информации и формирования управляющих воздействий: анализаторы сигналов, функциональные и операционные преобразователи, логические устройства, запоминающие устройства, автоматические регуляторы, задатчики всех типов, а также управляющие вычислительные машины и устройства.,, в том числе микропроцессоры, микро- и мини ЭВМ и др. В функциональном отношении эта группа устройств является самой сложной, поскольку они реализуют все алгоритмы автоматического регулирования и управления: от простейших задач стабилизации до автоматизации управления предприятиями или даже целыми отраслями. Устройства четвертой группы (исполнительные устройства) - это электрические, пневматические, гидравлические или комбинированные исполнительные механизмы, усилители мощности, позиционеры и некоторые вспомогательные устройства к ним, а также различные регулирующие органы, которые могут в ряде случаев являться составной частью основного технологического оборудования.
Дальнейшим развитием системы ГСП являются агрегатные комплексы (АК), создаваемые на основе технических средств, входящих в отдельные функциональные группы ГСП, и предназначенные для самостоятельного применения в соответствии с их спецификой.
3. Измерительные преобразователи и приборы для измерения параметров состояния сред
Измерительные преобразователи и приборы этой группы предназначены для получения измерительной информации о таких физических величинах, как температура, давление, расход, уровень и др., которые характеризуют состояние разных технологических сред (твердых, жидких, газообразных), а также машин и агрегатов и их отдельных элементов, деталей и узлов.
Измерение указанных параметров и представление информации об их значениях и изменениях являются абсолютно необходимыми на всех стадиях протекания любых технологических процессов. Ни один технологический процесс не может управляться ни вручную, ни автоматически без получения такой информации с помощью соответствующих технических средств измерений, основанных на использовании различных методов измерений и способов получения результатов измерений.
.1 Измерение температуры
Температура является одним из важнейших параметров, характеризующих многие процессы пищевой технологии. Для измерения температуры применяется большое количество средств измерения, называемых термометрами.
Термометры расширения. Действие термометров расширения основано на использовании зависимости удельного объема вещества от температуры измеряемой среды, в которую оно помещено.
Жидкостные термометры. Измерение температуры жидкостными термометрами расширения основано на различии коэффициентов объемного расширения материала оболочки термометра и жидкости, заключенной в ней. Оболочка термометров изготовляется из специальных термометрических сортов стекла с малым коэффициентом расширения. Пределы измерения стеклянных термометров от -200 до +750 "С.
.2 Автоматическое регулирование
Автоматические регуляторы, исполнительные механизмы и регулирующие органы.
Всякая автоматическая система регулирования (АСР) состоит из совокупности объекта регулирования (ОР), измерительного устройства (ИУ), автоматического регулятора (АР), исполнительного механизма (ИМ) и регулирующего органа (РО).
Автоматический регулятор представляет собой устройство, предназначенное для преобразования сигнала от измерительного устройства в соответствии с заданным алгоритмом (законом) управления и усиления его до значений, необходимых для управления исполнительным механизмом, воздействующим через регулирующий орган на объект управления.
По способу действия АР подразделяются на регуляторы прямого и непрямого (косвенного) действия. В регуляторах прямого действия энергия для их работы поступает от самого объекта автоматизации. В регуляторах непрямого действия энергия к их элементам подводится от внешнего источника, что позволяет развивать достаточно большие динамические усилия при перемещении регулирующих органов и обеспечивает возможность территориального разделения объекта, автоматического регулятора и исполнительного механизма с регулирующим органом. Кроме того, регуляторы косвенного действия обладают более высокими быстродействием и точностью.
Структурная схема автоматического регулятора.
По виду подводимой энергии регуляторы подразделяются на электрические, пневматические, гидравлические и комбинированные. Одной из основных характеристик регуляторов является закон регулирования. Современные регуляторы косвенного действия представляют собой устройства, состоящие из нескольких структурных элементов, основными из которых являются многоступенчатые усилители, сумматоры, модуляторы, умножители и другие блоки, с помощью которых обеспечивается построение схем, обусловливающих формирование регулирующего воздействия в соответствии с алгоритмом управления.
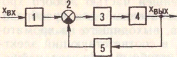
Электрические автоматические регуляторы (автоматические регулирующие блоки), структурная схема которых приведена на рис. 4.1, предназначены для формирования выходного сигнала, подаваемого к электрическому исполнительному механизму АСР.
Автоматический регулятор состоит из узла входных цепей 1, к которому подводятся сигналы от измерительных преобразователей. Далее преобразованные сигналы поступают к сумматору 2, к которому также подводится сигнал, сформированный узлом обратной связи 5. Разность между сигналом обратной связи и сигналом от измерительного преобразователя подается к суммирующему усилителю 3 и далее к узлу 4, с помощью которого формируется управляющий сигнал в соответствии с законом регулирования. Настройки вводятся в регулятор при наладке АСР конкретного объекта автоматизации через узел входных цепей 1.
3.3 Исполнительные механизмы
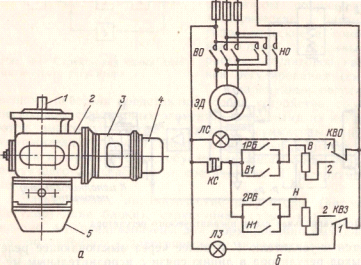
Электродвигательный исполнительный механизм: а- общий вид, б-электрическая схема включения
Исполнительные механизмы (ИМ), являясь составной частью АСР, предназначены для перемещения регулирующего органа (РО) в соответствии с командой, получаемой от регулятора. При переходе на ручное (дистанционное) управление команда к ИМ подается человеком-оператором с помощью соответствующих органов ручного управления. В зависимости от вида энергии, используемой в ИМ, они подразделяются на электрические, пневматические и гидравлические.
Электрические ИМ. В автоматике в основном используются электромагнитные и электродвигательные электрические ИМ. Основным узлом электромагнитных ИМ является электромагнит постоянного или
переменного тока разных форм и конструкций, обеспечивающих его срабатывание при протекании тока по обмотке управления.
Электродвигательные ИМ являются наиболее распространенными. По характеру движения выходного рабочего звена они подразделяются на однооборотные, у которых выходной вал перемещается по дуге окружности (до 360°); многооборотные, у которых выходной вал вращается (более 360°), и прямоходные, выходное звено (шток) которых перемещается поступательно. Электродвигательный ИМ (рис. 4.3) состоит из электродвигателя 3 с электромагнитным тормозом 4, блока 5 с конечными выключателями, червячного редуктора 2 и выходного вала редуктора 1, предназначенного для сочленения с регулирующим органом. Пуск электродвигателя в ту или иную сторону вращения обеспечивается включением контактов 1РБ или 2РБ реле автоматического регулятора. При этом через обмотки В или Н реверсивного магнитного пускателя потечет ток и включатся его главные контакты ВО или НО, с помощью которых включается в сеть электродвигатель ЭД. Блок-контакты В1 и Н1 служат для шунтирования контактов регулятора. Для отключения электродвигателя при достижении выходным валом редуктора крайних положений предназначены конечные выключатели КВО и КВЗ, зажигая при этом одну из соответствующих сигнальных ламп ЛО или ЛЗ. Кнопка К.С служит для аварийного останова электродвигателя.
Пневматические ИМ. Предназначены для работы с пневматическими регуляторами и выпускаются в двух модификациях: мембранные и поршневые. Мембранный исполнительный механизм (рис. 4.4) состоит из следующих основных элементов: корпуса 1 (составлен из двух фланцев), мембраны 2, возвратной пружины 3 и штока 4. Втулка с натяжной гайкой 5 служит для регулирования усилия, развиваемого пружиной.
При подаче давления от пневматического регулятора в надмембранную плоскость мембрана 2 прогибается вниз, тем самым перемещая шток 4, сочлененный с регулирующим органом. Противодействующее усилие и возврат штока в исходное положение при отсутствии давления в надмембранной полости осуществляются с помощью пружины 3.
В поршневых ИМ перестановочное усилие создается давлением рабочей среды в поршневых полостях.
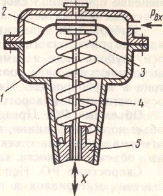
Рис. 3.4. Мембранный исполнительный механизм
Гидравлические ИМ. В них используется энергия рабочей жидкости под давлением. Эти механизмы применяют в АСР, если необходимы значительные усилия для перемещения регулирующего орган.