ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 81
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Порядок функционирования трехфазных трансформаторов:
Первичная обмотка подключается в сеть переменного тока.
В сердечнике магнитопровода инициируется магнитный поток, охватывающий обмотки всех фаз. В каждом из витков имеется ЭДС, равная для всех витков по силе и направлению.
Если в первичной обмотке число витков превышает число витков во вторичной обмотке, то трансформатор работает как повышающий, и наоборот.
К трансформаторам специального назначения относят трансформаторы, работающие в особых режимах (насыщенной или ненасыщенной магнитной цепи, короткого замыкания или холостого хода и др.) и предназначенные, например, для расширения пределов изменения приборов (измерительные трансформаторы тока и напряжения), для преобразования формы кривой напряжения (пиктрансформаторы), для систем защиты (быстронасыщающиеся), для электрической изоляции от первичной цепи (измерительные трансформаторы, изолирующие трансформаторы и т. д.).
Измерительные трансформаторы напряжения используются для включения вольтметров, частотомеров, обмотки напряжения ваттметров и счетчиков.
Измерительные трансформаторы тока предназначены для подключения амперметров, реле, токовых обмоток ваттметров и счетчиков.
На рис. 1 показана схема включения измерительных приборов через измерительные трансформаторы в однофазную сеть.
Для безопасности прикосновения к приборам один зажим вторичных обмоток трансформаторов заземляют. Измеряемое напряжение U1 по показанию вольтметра будет U1 = nUU2, а измеряемый ток I1 – по показаниям амперметра: I1=n1,I2, где nU и nI – коэффициенты трансформации трансформаторов напряжения и тока соответственно.
Вторичные обмотки имеют стандартные значения U2: 100 В для трансформаторов напряжения и 5 и 1 А для трансформаторов тока. Поэтому диапазон измерения может быть расширен путем регулирования коэффициентов трансформации, т.е. соотношения числа витков.
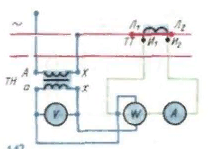
Рисунок 1
Измерительный трансформатор напряжения работает в режиме, близком к холостому ходу. Очевидно точность измерения напряжения будет тем выше, чем меньше падение напряжения на трансформаторе.
В трансформаторах тока, наоборот, снижение погрешности достигается путем снижения тока I
10, для чего используется ленточный магнитопровод кольцевой формы из материала с малыми потерями (малое значение коэрцитивной силы Нc) и работе в ненасыщенной части кривой намагничивания.
Поскольку нормальным режимом работы трансформатора тока является режим короткого замыкания, то для переключений во вторичной цепи устанавливаются приспособления, замыкающие выходные зажимы вторичной обмотки.
Пиктрансформатор (рис. 2) применяется для преобразования напряжения синусоидальной формы в импульсное напряжение пикообразной формы. Пиктрансформатор имеет магнитопровод, состоящий из трех стержней: стержень 1 не насыщен; на нем помещена первичная обмотка; стержень 2 с расположенной на нем вторичной обмоткой насыщается за счет уменьшения площади сечения стержня; стержень 3 является магнитным шунтом и отделен от сердечника воздушным зазором. Магнитный поток стержня 1 замыкается частично через стержни 2 и 3 и равен сумме магнитных потоков этих стержней
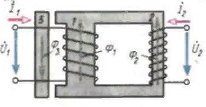
Рисунок 2
Самостоятельная работа №14
Тема 7.1 Классификация, режимы работы электроприводов
Электроприводы по способам распределения механической энергии можно разделить на три основных типа: групповой электропривод; индивидуальный и взаимосвязанный.
Групповой электропривод обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины. Передача механической энергии от одного двигателя к нескольким рабочим машинам и ее распределение между ними производится с помощью одной или нескольких трансмиссий. Такой групповой привод называют также трансмиссионным (рисунок 1).
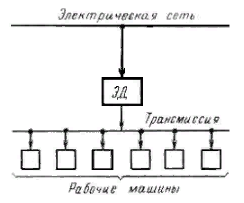
Рисунок 1
Индивидуальный привод по сравнению с трансмиссионным и групповым обладает рядом преимуществ: производственные помещения не загромождаются тяжелыми трансмиссиями и передаточными устройствами; улучшаются условия работы и повышается производительность труда вследствие облегчения управления отдельными механизмами, уменьшения запыленности помещений, лучшего освещения рабочих мест; снижается травматизм обслуживающего персонала. Кроме того, индивидуальный электропривод отличается более высокими энергетическими показателями.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электродвигательных устройства (или электроприводов), при работе которых поддерживается заданное соотношение или равенство скоростей или нагрузок или положение исполнительных органов рабочих машин. Необходимость в таком приводе часто возникает по конструктивным пли технологическим соображениям.
По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движения.
Вращательное однонаправленное, а также реверсивное движение осуществляется электродвигателями обычного исполнения. Поступательное движение может быть получено путем использования электродвигателя вращательного движения обычного исполнения совместно с преобразовательным механизмом (кулисным, винтовым, реечным и т.п.) либо применения электродвигателя специального исполнения для поступательного движения (так называемые линейные электродвигатели, магнитогидродинамические двигатели).
По степени управляемости электропривод может быть:
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий;
2) регулируемый – для сообщения изменяемой пли неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3) программно-управляемый – управляемый в соответствии с заданной программой;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
Можно классифицировать электроприводы и по роду передаточного устройства. В этом смысле электропривод бывает:
1) редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации можно различать:
1) неавтоматизированный электропривод, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, управляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Два последних типа электропривода находят применение в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
Все режимы в электроприводе делятся на установившиеся (номинальный режим работы) и переходные (пуск, реверс, торможение).
Установившийся режим работы электропривода определяется из условия равенства нулю динамического момента. Этот режим характеризуется работой двигателя с неизменной угловой скоростью, постоянными во времени и равными по величине моментом двигателя и моментом сопротивления. Так как момент, развиваемый двигателем в установившемся режиме, есть функция скорости, то равенство М=Мс возможно только при условии, что момент сопротивления – постоянная величина или функция скорости. Если МС есть функция, например, пути (угла поворота), то даже при постоянной угловой скорости момент сопротивления изменяется во времени и установившийся режим невозможен.
Установившийся режим описывается статическими характеристиками.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т. п. Переходные режимы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т. п.).
Характер переходного режима электропривода зависит от свойств рабочей машины, типа примененного двигателя и механической передачи, принципа действия и свойств аппаратуры управления, а также от режима работы двигателя (пуск, торможение, прием и сброс нагрузки и т.д.).
Переходные режимы описываются динамическими характеристиками.
Самостоятельная работа №15
Тема 7.2 Аппаратура управления электродвигателями
Составной частью электропривода является аппаратура управления и защиты электродвигателей, предназначенная для пуска и остановки двигателя, изменения частоты и направления вращения вала двигателя, а также обеспечения работы электродвигателя в заданных режимах в соответствии с требованиями технологического процесса и защиты его при отклонении режима работы от заданного.
Аппаратуру управления классифицируют по следующим признакам: по способу управления – с ручным, автоматическим и дистанционным управлением; роду тока – для постоянного и переменного тока; исполнению – открытое, защищенное пыле-брызгонепроницаемое, тропическое и т.п.
Аппаратура ручного управления приводится в действие обслуживающим персоналом. К ней относятся выключатели и переключатели, рубильники, пусковые резисторы, кнопочные станции, магнитные пускатели, автоматические выключатели. Ручное управление электроприводами применяют только в редко включаемых установках небольшой мощности, не требующих дистанционного управления.
Для автоматического управления электроприводом широко применяют релейно-контакторную аппаратуру, в состав которой входят контакторы, магнитные пускатели с кнопочными станциями, конечные и путевые выключатели, различные реле и т. п. Существуют бесконтактные способы управления электроприводами, основанные на применении тиристоров и симисторов.