ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 196
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
щихся обязательно демонстрируются и обсуждаются на занятиях по физике.
Подводя итог анализу применения роботов в учебном процессе по физике как объектов познания, следует указать на условия эффективности этой деятельности.
Итак, в данном параграфе рассмотрено одно из направлений методики внедрения робототехники в учебный процесс по физике (робот как объект изучения). С этой целью рассмотрена структура элементной базы роботов, дана характеристика исполнительным устройствам, устройствам обратной связи и устройствам управления. Составлены информационно-методические таблицы по изучению научных основ элементной базы робототехнических объектов в разделах и темах школьного курса физики. Выделены уровни освоения элементной базы роботов и сформулированы условия применения робототехники как объекта познания в курсе физики.
2.2. Робот как инструмент познания в учебном процессе по физике
В ближайшем будущем сфера науки и культуры, сфера социальных услуг и наш быт будут насыщены робототехникой. Это будут разнообразные и высокотехнологичные устройства, призванные оказывать помощь человеку в непосредственной близости от него и на больших расстояниях, обеспечивать производство и доставку товаров и услуг. РТ-устройства будут взаимодействовать между собой, в том числе в сетевом беспроводном варианте.
Разнообразие роботов определяется их востребованностью в различных сферах жизнедеятельности общества, в том числе в сфере познания. Как инструменты познания роботы уже весьма активно используются в научных и научно-технических исследованиях. В научном познании роботы применяются при проведении опытов. В научно-техническом исследовании они используются с целью изучения других технических объектов (обнаружение, диагностика состояния и пр.). Научно-техническое исследование может проводиться с целью создания принципиально новых роботов или модернизации имеющихся, а также поиска наиболее эффективных режимов их функционирования.
Итак, робототехника как инструмент познания может быть представлена в учебном процессе по предмету:
1) роботизированным физическим экспериментом или наблюдением (реализация современной методологии научного познания);
2) применением РТ-устройства как средства изучения/исследования других объектов техники, а также виртуальным и натурным моделированием РТ-объектов заданного назначения (реализации методологии научно-технического познания в области роботостроения).
Применение образовательной робототехники в учебном процессе по физике в качестве инструмента познания подробно рассмотрено в наших работах [39; 40; 130]. Рассмотрим основные составляющие этого направления работы учителя физики.
2.2.1. Применение образовательной робототехники в учебном физическом эксперименте
В системе научного познания технические знания и объекты техники используются, как правило, с целью постановки опытов (наблюдений, экспериментов). Натурный опыт, реализуемый с применением технологий робото
техники, может быть определен как роботизированный. Наблюдения и эксперименты этого вида уже используются во многих областях научного знания (исследования микромира, археология, подводные исследования, изучение внутреннего строения человеческих органов, анализ молекулярной структуры веществ, в том числе на наноуровне, исследования явлений и процессов в условиях ближнего и дальнего космоса и др.). Необходимость роботизации научных экспериментов определяется ключевыми функциями робота как технического объекта. Робот способен заменить человека в опасных и чрезмерно тяжелых экспериментальных работах, может решать поставленные задачи более эффективно и, наконец, выполнять работу, которую человек просто не хочет делать, освобождая себе время для решения сложных интеллектуальных задач, пока еще недоступных роботу. Роботизированный эксперимент или наблюдение отличают более качественная реализация процесса проведения, широкий спектр и высокая точность регистрации данных, их автоматическое накопление, обработка, полный и безошибочный формально-логический анализ, визуализация хода опыта и его результатов.
Нет сомнения в том, что учащиеся средней школы, осваивая методологию научного познания, должны овладеть элементарными умениями в постановке традиционных, компьютеризированных, а теперь уже и роботизированных опытов. Курс физики средней школы и оборудование по образовательной робототехнике предоставляют им такую возможность.
Рассмотрим пример постановки роботизированного эксперимента по исследованию закономерностей колебаний пружинного маятника. На рис. 4
представлена установка для данного эксперимента, собранная на базе робо-тотехнического набора LEGO Mindstorms EV3. В эксперименте в полном объеме реализованы все системы кибернетической модели робота. Это системы управления, исполнения и сбора данных. Робот функционирует по схеме с обратной связью. Система управления формирует команды для системы исполнения по заданной программе, а система сбора данных обеспечивает обратную связь с системой управления, «информируя» ее о состоянии внешней среды и результатах выполнения команд.

Рис.4. Установка для исследования закономерностей колебаний пружинного маятника
В данном эксперименте на автоматическом уровне реализуются: физические манипуляции с элементами установки, сбор и обработка данных, а также их вывод на экран микропроцессора и компьютера. Последовательно запускаются механизмы, обеспечивающие: вывод системы из положения равновесия и «гашение» свободных колебаний, изменение массы маятника за счет увеличения числа грузов в подвесе, изменение жесткости пружины, которое достигается уменьшением длины ее рабочей части за счет закручивания в держателе.
В ходе эксперимента последовательно запускаются две программы: 1) исследование зависимости периода колебаний пружинного маятника от его массы, 2) исследование зависимости периода колебаний пружинного маятника от жесткости пружины. В управляющей программе задаются значения масс и коэффициентов жесткости, число испытаний, математические формулы для обработки результатов эксперимента. Период колебаний оценивается по графику зависимости расстояния от датчика до колеблющегося маятника от времени. Графики выводятся на экран компьютера (рис. 5).
Роботизированный эксперимент длится не более минуты. Датчики системы контролируют проведение эксперимента в заданном режиме. Возможно его многократное повторение, в том числе в условиях изменения исходных данных. По результатам такого эксперимента учащиеся могут сделать выводы о закономерностях колебательного движения пружинного маятника.
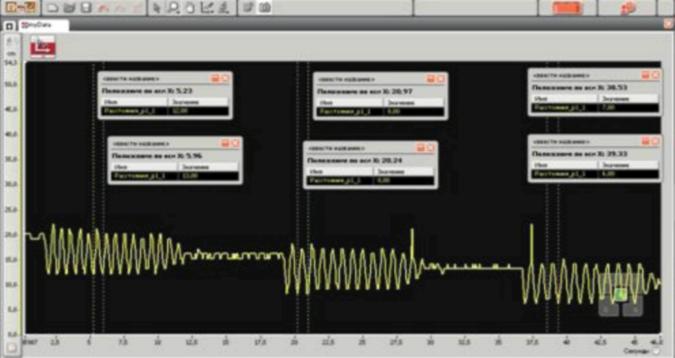
Рис. 5. График зависимости расстояния от датчика до колеблющегося маятника от времени
Отметим преимущества роботизированного эксперимента как инструмента познания. При проведении такого эксперимента за счет применения датчиковых систем сбора данных существенно повышается качество измерений. Появляется возможность автоматического воздействия на объект исследования. Возрастает точность задаваемых параметров воздействия и становится возможной автоматическая регулировка этих параметров. Контролируется время реакции роботизированной системы на внешнее воздействие. Робот-экспериментатор может автоматически «контролировать» и «регулировать» состояние
своих систем по различным параметрам. Так, например, точность поворота вала электродвигателя учебного робота составляет всего один градус, что позволяет обеспечить в достаточной мере равномерность вращения исследуемого объекта, равномерность поступательного движения какой-либо механической части системы, строгую периодичность колебаний и т.п. В условиях роботизированного эксперимента система сама может подстраиваться под нужный режим работы: например, «обходить» резонансные частоты», регулировать температуру исследуемых объектов, поддерживать давление газа в сосуде, «следить» за уровнем освещенности поверхности или изменением ее цветности, корректировать значения параметров электрической цепи и т.д. Наличие электроники в аппаратной части роботизированной установки в сочетании с быстродействием микропроцессора позволяет достигать необходимой скорости реакции системы на различные воздействия.
Являются возможными не только сбор данных с датчиков и запись их в память микрокомпьютера, но передача этих данных в реальном времени через USB кабель, Wi-Fi или Bluetooth на удаленный компьютер для оперативной обработки. Следует отметить, что программа «NXT 2.1 Data Logging», а также аналогичный модуль «Эксперимент» программы «MINDSTORMS® Education EV3» имеют ряд инструментов для компьютерной обработки данных эксперимента. Применение этих инструментов позволяет отображать численные данные для выбранной точки графика, фиксировать минимальное, максимальное и среднее значения физической величины в выделенном диапазоне графика, менять цвет графика, представлять в одной координатной плоскости несколько графиков, выполнять их линейную аппроксимацию и др.
Немаловажной является возможность многократного воспроизведения эксперимента. Число испытаний может задаваться на программном уровне. Снижается общее время на проведение исследования. Так, например, роботизированные эксперименты по механике длятся, как правило, не более 30-40 секунд. За такой короткий срок экспериментатор получает целую серию данных об исследуемом явлении.
Если в экспериментальной установке использовать не один робототехнический набор, то можно проводить более сложные многоэтапные физические
Подводя итог анализу применения роботов в учебном процессе по физике как объектов познания, следует указать на условия эффективности этой деятельности.
-
Изучение научных основ робототехники на основе понимания междисциплинарного характера процесса робототехнического моделирования и конструирования. Особое место в этой связи занимают такие предметы как технология, физика, математика и информатика. Знание других предметов может понадобиться учащимся при изучении и проектировании роботов относящимся к специальным областям знаний и сферам деятельности. -
Уровневый характер освоения робототехнических систем как объектов изучения (см. рис. 3). Углубленный уровень освоения робототехники может быть достигнут в профильных классах, а также при изучении основ роботоконструирования в рамках курсов по выбору в основной школе и элективных курсов в средней школе. -
Обеспечение преемственности в освоении научных основ робототехники в основной и старшей школе, а также в основном учебном курсе физики, элективных курсах и внеурочной деятельности по предмету. -
Содействие средствами учебного предмета развитию конкурсного и соревновательного движений по робототехнике. Соревновательный эффект и успехи учащихся в конкурсном движении с подготовленными творческими проектами существенно стимулируют развитие мотивации познавательной деятельности учащихся по различным предметам, в том числе в изучении научных основ технических приложений физики.
Итак, в данном параграфе рассмотрено одно из направлений методики внедрения робототехники в учебный процесс по физике (робот как объект изучения). С этой целью рассмотрена структура элементной базы роботов, дана характеристика исполнительным устройствам, устройствам обратной связи и устройствам управления. Составлены информационно-методические таблицы по изучению научных основ элементной базы робототехнических объектов в разделах и темах школьного курса физики. Выделены уровни освоения элементной базы роботов и сформулированы условия применения робототехники как объекта познания в курсе физики.
2.2. Робот как инструмент познания в учебном процессе по физике
В ближайшем будущем сфера науки и культуры, сфера социальных услуг и наш быт будут насыщены робототехникой. Это будут разнообразные и высокотехнологичные устройства, призванные оказывать помощь человеку в непосредственной близости от него и на больших расстояниях, обеспечивать производство и доставку товаров и услуг. РТ-устройства будут взаимодействовать между собой, в том числе в сетевом беспроводном варианте.
Разнообразие роботов определяется их востребованностью в различных сферах жизнедеятельности общества, в том числе в сфере познания. Как инструменты познания роботы уже весьма активно используются в научных и научно-технических исследованиях. В научном познании роботы применяются при проведении опытов. В научно-техническом исследовании они используются с целью изучения других технических объектов (обнаружение, диагностика состояния и пр.). Научно-техническое исследование может проводиться с целью создания принципиально новых роботов или модернизации имеющихся, а также поиска наиболее эффективных режимов их функционирования.
Итак, робототехника как инструмент познания может быть представлена в учебном процессе по предмету:
1) роботизированным физическим экспериментом или наблюдением (реализация современной методологии научного познания);
2) применением РТ-устройства как средства изучения/исследования других объектов техники, а также виртуальным и натурным моделированием РТ-объектов заданного назначения (реализации методологии научно-технического познания в области роботостроения).
Применение образовательной робототехники в учебном процессе по физике в качестве инструмента познания подробно рассмотрено в наших работах [39; 40; 130]. Рассмотрим основные составляющие этого направления работы учителя физики.
2.2.1. Применение образовательной робототехники в учебном физическом эксперименте
В системе научного познания технические знания и объекты техники используются, как правило, с целью постановки опытов (наблюдений, экспериментов). Натурный опыт, реализуемый с применением технологий робото
техники, может быть определен как роботизированный. Наблюдения и эксперименты этого вида уже используются во многих областях научного знания (исследования микромира, археология, подводные исследования, изучение внутреннего строения человеческих органов, анализ молекулярной структуры веществ, в том числе на наноуровне, исследования явлений и процессов в условиях ближнего и дальнего космоса и др.). Необходимость роботизации научных экспериментов определяется ключевыми функциями робота как технического объекта. Робот способен заменить человека в опасных и чрезмерно тяжелых экспериментальных работах, может решать поставленные задачи более эффективно и, наконец, выполнять работу, которую человек просто не хочет делать, освобождая себе время для решения сложных интеллектуальных задач, пока еще недоступных роботу. Роботизированный эксперимент или наблюдение отличают более качественная реализация процесса проведения, широкий спектр и высокая точность регистрации данных, их автоматическое накопление, обработка, полный и безошибочный формально-логический анализ, визуализация хода опыта и его результатов.
Нет сомнения в том, что учащиеся средней школы, осваивая методологию научного познания, должны овладеть элементарными умениями в постановке традиционных, компьютеризированных, а теперь уже и роботизированных опытов. Курс физики средней школы и оборудование по образовательной робототехнике предоставляют им такую возможность.
Рассмотрим пример постановки роботизированного эксперимента по исследованию закономерностей колебаний пружинного маятника. На рис. 4
представлена установка для данного эксперимента, собранная на базе робо-тотехнического набора LEGO Mindstorms EV3. В эксперименте в полном объеме реализованы все системы кибернетической модели робота. Это системы управления, исполнения и сбора данных. Робот функционирует по схеме с обратной связью. Система управления формирует команды для системы исполнения по заданной программе, а система сбора данных обеспечивает обратную связь с системой управления, «информируя» ее о состоянии внешней среды и результатах выполнения команд.
Рис.4. Установка для исследования закономерностей колебаний пружинного маятника
В данном эксперименте на автоматическом уровне реализуются: физические манипуляции с элементами установки, сбор и обработка данных, а также их вывод на экран микропроцессора и компьютера. Последовательно запускаются механизмы, обеспечивающие: вывод системы из положения равновесия и «гашение» свободных колебаний, изменение массы маятника за счет увеличения числа грузов в подвесе, изменение жесткости пружины, которое достигается уменьшением длины ее рабочей части за счет закручивания в держателе.
В ходе эксперимента последовательно запускаются две программы: 1) исследование зависимости периода колебаний пружинного маятника от его массы, 2) исследование зависимости периода колебаний пружинного маятника от жесткости пружины. В управляющей программе задаются значения масс и коэффициентов жесткости, число испытаний, математические формулы для обработки результатов эксперимента. Период колебаний оценивается по графику зависимости расстояния от датчика до колеблющегося маятника от времени. Графики выводятся на экран компьютера (рис. 5).
Роботизированный эксперимент длится не более минуты. Датчики системы контролируют проведение эксперимента в заданном режиме. Возможно его многократное повторение, в том числе в условиях изменения исходных данных. По результатам такого эксперимента учащиеся могут сделать выводы о закономерностях колебательного движения пружинного маятника.
Рис. 5. График зависимости расстояния от датчика до колеблющегося маятника от времени
Отметим преимущества роботизированного эксперимента как инструмента познания. При проведении такого эксперимента за счет применения датчиковых систем сбора данных существенно повышается качество измерений. Появляется возможность автоматического воздействия на объект исследования. Возрастает точность задаваемых параметров воздействия и становится возможной автоматическая регулировка этих параметров. Контролируется время реакции роботизированной системы на внешнее воздействие. Робот-экспериментатор может автоматически «контролировать» и «регулировать» состояние
своих систем по различным параметрам. Так, например, точность поворота вала электродвигателя учебного робота составляет всего один градус, что позволяет обеспечить в достаточной мере равномерность вращения исследуемого объекта, равномерность поступательного движения какой-либо механической части системы, строгую периодичность колебаний и т.п. В условиях роботизированного эксперимента система сама может подстраиваться под нужный режим работы: например, «обходить» резонансные частоты», регулировать температуру исследуемых объектов, поддерживать давление газа в сосуде, «следить» за уровнем освещенности поверхности или изменением ее цветности, корректировать значения параметров электрической цепи и т.д. Наличие электроники в аппаратной части роботизированной установки в сочетании с быстродействием микропроцессора позволяет достигать необходимой скорости реакции системы на различные воздействия.
Являются возможными не только сбор данных с датчиков и запись их в память микрокомпьютера, но передача этих данных в реальном времени через USB кабель, Wi-Fi или Bluetooth на удаленный компьютер для оперативной обработки. Следует отметить, что программа «NXT 2.1 Data Logging», а также аналогичный модуль «Эксперимент» программы «MINDSTORMS® Education EV3» имеют ряд инструментов для компьютерной обработки данных эксперимента. Применение этих инструментов позволяет отображать численные данные для выбранной точки графика, фиксировать минимальное, максимальное и среднее значения физической величины в выделенном диапазоне графика, менять цвет графика, представлять в одной координатной плоскости несколько графиков, выполнять их линейную аппроксимацию и др.
Немаловажной является возможность многократного воспроизведения эксперимента. Число испытаний может задаваться на программном уровне. Снижается общее время на проведение исследования. Так, например, роботизированные эксперименты по механике длятся, как правило, не более 30-40 секунд. За такой короткий срок экспериментатор получает целую серию данных об исследуемом явлении.
Если в экспериментальной установке использовать не один робототехнический набор, то можно проводить более сложные многоэтапные физические