ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 193
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
При рассмотрении степеней свободы манипуляторов робота необходимы знания по курсу математики. Описание подвижности манипуляторов осуществляется в различных системах координат: прямоугольных, цилиндрических, сферических и служит примером использования знаний об этих системах координат в технике.
При изучении конструкций и сборке роботов является важным умение чтения чертежей. Необходимо уметь создавать модель робота в виртуальной среде и программировать ее поведение. Это является основанием интеграции физики с такими предметами, как черчение и информатика.
Устройства обратной связи. Эти устройства на сегодняшний день достаточно разнообразны. В ходе учебного процесса по физике имеется возможность познакомить учащихся с работой нескольких десятков видов датчиков, входящих в различные робототехнические наборы, а также приобретаемых по отдельности. Для подавляющего числа датчиков, используемых в современных автоматизированных системах, применяется принцип преобразования измеряемой физической величины в электрический сигнал или изменения параметров этого сигнала. Это обусловлено тем, что электрический сигнал передаётся на большие расстояния, может быть оцифрован и обработан устройствами управления. Ниже в таблице 2 представлены некоторые виды датчиков и указаны те физические явления и законы, на основе которых объясняется принцип их действия.
Таблица 2. Изучение устройств обратной связи в курсе физики
| Элемент робота | Физическое явление, закон | Тема курса физики | Класс |
| Датчик магнитного поля | Эффект Холла | Основы электродинамики | 11 |
| Датчик расстояния | Распространение и отражение ультразвука | Механические колебания и волны | 9, 10 |
| Датчик освещённости | Фоторезистор | Электрический ток в различных средах | 11 |
| Датчик силы виброчастотный (струнный) | Механические колебания | Механические колебания и волны | 9, 10 |
| Датчик силы пьезок-варцевый | Пьезоэлектрический эффект | Силы в механике Электрический ток в различных средах | 10 |
| Датчик силы тензометрический | Преобразование деформации упругих элементов в изменение электрического сопротивления. | Электрический ток в различных средах | 10 |
| Датчик акустический | Распространение звука | Механические колебания и волны | 9, 10 |
| Датчик температуры | Терморезистор, изменения электрического сопротивления (полупроводника или проводника) при изменении температуры | Электрический ток в различных средах | 10 |
| Датчик температуры термоэлектрический (термопара) | Термоэлектрический эффект. | Электрические явления. Источники тока | 8 |
| Датчик температуры -пирометр | Излучение нагретых тел | Электромагнитные волны | 9,11 |
| Датчик температуры пьезоэлектрический | Зависимость частоты колебаний пьезорезонатора от температуры | Изучается на элективном курсе | 10, 11 |
| Датчик температуры акустический | Зависимость скорости распространения звука в газах от температуры | Механические колебания и волны | 9 |
| Датчик силы тока на основе эффекта Холла | Эффект Холла | Основы электродинамики | 11 |
| Датчик напряжения | Преобразования входного тока пропорционального приложенному напряжению (постоянному, переменному, импульсному и т.д.) в пропорциональный выходной ток с гальванической развязкой между силовой и измерительной цепями | Законы постоянного тока. Переменный ток. | 8, 10 |
| Датчик проводимости | Ионная проводимость в жидкостях и газах | Электрический ток в различных средах | 10 |
| Датчик ультрафиолетового излучения, датчик инфракрасного излучения | Увеличение электропроводности полупроводника под воздействием электромагнитного излучения (фоторезистивный эффект) | Электрический ток в различных средах | 10 |
Важно отметить, что таблицы 1 и 2 в совокупности образуют комплект методических таблиц «Изучение научных основ элементной базы робототехнических объектов в разделах и темах школьного курса физики». Его содержание следует систематически уточнять и дополнять по мере развития робототехники и учебных наборов для ее освоения в средней школе, а также совершенствования содержания школьного курса физики и его политехнической составляющей.
К устройствам управления роботов относятся микроконтроллеры, микропроцессоры, компьютеры и дополнительная аппаратная техника.
Особенности функционирования управляющих устройств роботов рассматриваются в курсе информатики. В курсе физики изучаются научные основы работы отдельных элементов компьютерной техники (резисторов конденсаторов, катушек индуктивности, полупроводниковых элементов и пр.), а также научные основы процессов приема, усиления и передачи радиосигналов.
С применением различных языков и сред программирования составляются компьютерные программы управления исполнительными устройствами. Управляющие программы обеспечивают слаженную работу всех узлов робототехнической системы. В таблице 3 приведены основные системы программирования роботов, созданных на базе различных школьных робототехнических наборов.
Таблица 3. Системы программирования в образовательной робототехнике
| Образовательные наборы | | | | | | | | | | | | | |
| Lego WeDo | + | | | | | | + | | | | | | |
| Lego RCX | | + | | | + | | | | | | | | |
| Lego NXT | | + | + | + | + | + | + | | | | | | |
| Lego EV3 | | | | + | + | + | | | | | | | |
| Hunа | | | | | | | | | | | | | + |
| Arduino | | | | | + | | + | | | | + | | |
| Matrix | | | + | + | | | | | | | | | |
| Vex/ Технолаб | | | | | + | | | | + | | | | |
| Trik | | | | | | | | + | | | | | |
В настоящем исследовании разработан уровневый поход к изучению робота как сложного кибернетического и технического объекта. Соотношение уровней представлено на рис. 3.
При проектировании робота первый, второй и третий уровни соответствуют принятию общих проектных решений, связанных с выбором и комбинацией преимущественно готовых узлов его будущей конструкции. Четвертый уровень связан с пониманием научных основ функционирования робототехнической системы и алгоритмов этой работы. Это уже «тонкая» элементная структура робота, от выбора и качества которой зависит точность и эффективность исполнения роботом необходимых функций. На этом уровне инженер-конструктор, инженер-технолог и инженер-программист могут менять элементную базу роботов, в том числе создавать ее новые составляющие.
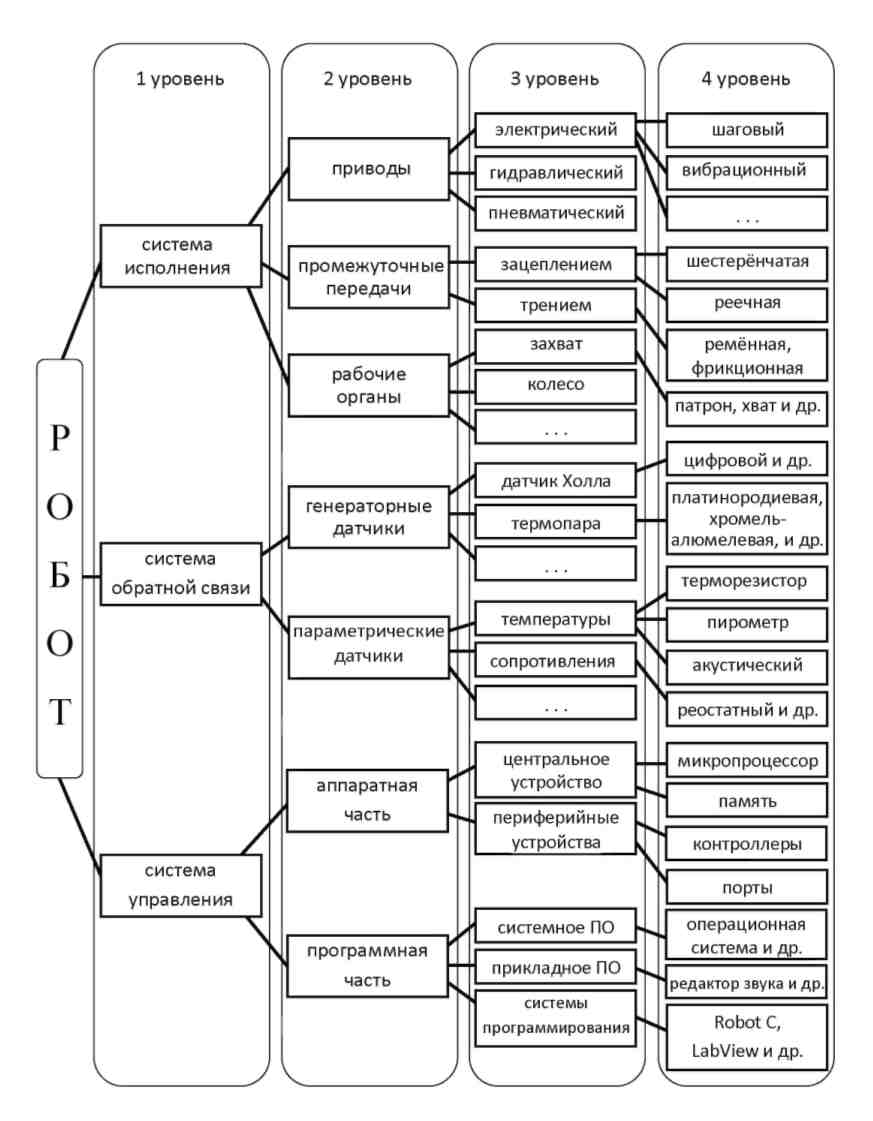
Рис. 3. Уровни рассмотрения структуры робота (М.Г.Ершов, [40])
Проникновение в «глубины» робототехнического моделирования определяется не только уровнем готовности учащихся к этой деятельности, но и качеством наборов по робототехническому конструированию, которые они используют. В частности, наборы Lego MINDSTORMS ориентированы на работу учащихся в основном на 1–2 уровнях, отчасти третьем [165]. Но, например, конструктор «Амперка», имеющий более открытую архитектуру, позволяет учащимся работать на четырех уровнях.
Знакомство с физическими основами робототехники по мере изучения тем основного курса позволяет школьникам сознательно и продуктивно использовать элементную базу робототехники при проектировании различных конструкций роботов и создавать их более совершенные модели, в том числе с применением в данных моделях элементов собственной разработки. Нами выделено четыре уровня изучения, но отдельные элементы системы «робот» могут иметь более длинную «линейку» уровней. Разветвленная цепь «линий» элементной базы образует своеобразную «корневую» систему робота и обеспечивает весь его функционал. Научные основы работы этой системы и есть предмет изучения на занятиях по физике.
Изучение уровней проектирования и конструирования систем робота, физических основ работы его элементной базы позволяет школьникам более успешно решать задачи, связанные с созданием роботов различных видов.
На уроках физики при анализе технических приложении науки в качестве дополнения или на основе принципа равноценного дидактического замещения можно изучать те виды роботов, в основе действия которых лежат физические явления и законы соответствующих учебных тем. Такая возможность предоставляется учителю практически во всех учебных темах. Объектами замещения могут быть: 1) технические объекты, применяемые в различных сферах жизнедеятельности общества; 2) роботизированные установки учебного физического эксперимента. Изучение этих объектов можно организовать разными способами.
Первый способ ( д е м о н с т р а ц и о н н ы й ). При использовании этого способа учащимся сначала разъясняется устройство робототехнической конструкции и раскрываются физические основы работы ее элементной базы.
Впоследствии демонстрируется действующая модель робота. Данным способом, например, могут изучаться роботы, предназначенные для подводных исследований. Принцип действия их основных узлов вполне доступен пониманию учащихся. Можно продемонстрировать роботизированные установки для физического эксперимента, например, по изучению закономерностей колебаний пружинного маятника, явления резонанса, законов сухого трения и др.) (см. п. 2.2 – 2.4). Учитель при проведении роботизированного эксперимента обязательно разъясняет физические основы работы элементной базы этих экспериментальных установок.
Второй способ ( п р о е к т н ы й ) . При организации учебной работы на основе этого способа учитель предлагает учащимся задание для самостоятельной работы. Учащиеся должны предложить идею конструкции и собрать модель конкретного робота, обладающего определенным функционалом. Например, это может быть модель ядерного реактора. Данная модель должна демонстрировать некоторые элементы устройства реактора, а также процессы передачи тепла в его энергоблоке. В п. 2.3. на рис. 12–14 представлены варианты такой модели. Задания могут выполняться учащимися после освоения учебной темы курса физики как средство ее более углубленного изучения. Возможно предъявление задания с целью опережающего самостоятельного освоения материала темы. Проектные задания можно предлагать учащимся в качестве домашней работы, если в их распоряжении имеются наборы по робототехническому конструированию. Учитель может организовывать выполнение таких заданий на уроках технологии или в ходе внеурочной работы по физике и технологии. Работа над проектами возможна в рамках элективных курсов по робототехнике. Результаты такой проектной работы уча