ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 192
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
IV. Модуль по физике является одним из предметных модулей междисциплинарной образовательной программы по робототехнике и связан с решением специфического круга образовательных задач политехнической подготовки учащихся. Его содержание не должно противоречить задачам предметного обучения, а быть направленным на обогащение программы обучения физике необходимыми прикладными знаниями и видами учебной деятельности, создание дополнительных условий ее более качественного усвоения.
V. К условиям эффективного внедрения образовательной робототехники в учебный процесс по физике относятся:
• распределенное поэлементное включение робототехники в содержа
ние политехнического обучения на основе принципов дополнения или равноцен
ного дидактического замещения (рассмотрение научных основ работы эле
ментной базы объектов робототехники при изучении тем и разделов курса фи
зики средней школы как примеров технических приложений данной области
научного знания; организация учебной деятельности с объектами робототех
ники в рамках лабораторных занятий и практикумов по физике как примеров
современной методологии научного и научно-технического познания, техни
ческой деятельности по моделированию и конструированию робототехниче-
ских устройств как технических приложений физики);
• обеспечение трёхкомпонентной структуры методики обучения робототехнике (РТ как объект изучения, РТ как инструмент познания, РТ как средство обучения, развития и воспитания);
• осуществление межпредметных связей как средства реализации ме-
тапредметной и предметной составляющих программы обучения робото
технике (с о д е р ж а т е л ь н ы х : обучение по предметам в рамках общей
междисциплинарной программы; п р о ц е с с у а л ь н ы х : выполнение
междисциплинарных учебных заданий и проектов в условиях согласованного руководства со стороны коллектива учителей-предметников; о р г а н и з ац и о н н ы х : проведение межпредметных учебных семинаров и конференций с целью обобщения знаний учащихся и представления результатов их творческой деятельности в сфере робототехнического конструирования);
• дидактическое и методическое обеспечение применения робототехники в обучении (разработка методических материалов для учителя и дидактических материалов для учащихся, реализующих трехкомпонентную модель
включения робототехники в учебный процесс по физике);
-
соответствие уровня сложности элементной базы конструкторов, программного и дидактического обеспечения учебной робототехники зоне ближайшего развития учащихся; -
взаимосвязь учебной и внеурочной предметной деятельности по робототехнике с соревновательным и конкурсным движением (развитие индивидуального проектного творчества учащихся по робототехнике; организация школьных конкурсов и соревнований по применению робототехники в предметном обучении; представление предметных и междисциплинарных проектов на соревнованиях и конкурсах различных уровней, участие в олимпиадах по робототехнике);
• вариативность практик обучения робототехнике, обеспечивающая учёт уровня и профиля образовательной подготовки учащихся, их интереса и готовности к технической деятельности.
Поясним последнее из условий. Вариативность практики обучения физике с применением робототехники определяются разнообразием видов технической деятельности в данной области знания и уровнями их сложности. Возможно применение робототехники в рамках:
а) основного курса физики;
б) элективных курсов и практикумов по физике с применением робототехники;
в) межпредметных курсов и практикумов по робототехнике;
в) домашней работы по предмету (при наличии у учащихся наборов по РТ);
г) внеурочной работы по предмету и на межпредметной основе;
д) организации участия школьников в олимпиадном, конкурсном и соревновательном движениях по робототехнике.
В системе образовательной подготовки учащихся по предмету возможно различное сочетание указанных практик обучения.
VI. Степень вовлечённости школьников в процесс освоения робототехники зависит от многих факторов (познавательный интерес, интерес школьника к технике и программированию, профессиональная мотивация и др.). В рамках рассматриваемой модели обучения предполагается три уровня освоения программы обучения: базовый, расширенный, углубленный. Учащиеся средней школы имеют право и возможность самостоятельно определиться в выборе уровня знакомства с робототехникой и глубины ее освоения.
Б а з о в ы й у р о в е н ь обеспечивается традиционными формами и методами обучения: применение робототехники на уроках по предмету (демонстрация роботизированного физического эксперимента и моделей простейших промышленных и сервисных роботов, объяснение устройства и принципа действия этих технических объектов и их отдельных элементов); выполнение роботизированных лабораторных работ на базе «готовых» экспериментальных установок; проведение учебных семинаров и конференций, включающих работу учащихся с дополнительной научно-популярной литературой по робототехнике, подготовку устных сообщений, рефератов, информационных страничек для сайта школы и т.п.
Р а с ш и р е н н ы й у р о в е н ь связывается с изучением робототехники в рамках элективных курсов и практикумов, выполнением учащимися небольших творческих предметных проектов.
У г л у б л е н н ы й у р о в е н ь освоения робототехники в средней школе – это уровень, на котором работают учащиеся, увлеченные этой областью технического творчества. Они посещают не только элективные курсы по робототехнике, но и работают над выполнением сложных робототехнических проектов (в том числе, межпредметных), являются постоянными участниками конкурсов и соревнований, используют возможности системы дополнительного образования (посещают кружки, клубы, центры робототехники и т.п.), включены в дистанционные формы обучения и сетевое взаимодействие по проблемам робототехнического конструирования.
VII. Основными результатами обучения являются: 1) развитие интереса учащихся к изучению физики и ее технических приложений, 2) рост качества знаний, умений и навыков политехнической направленности, 3) готовность учащихся к осознанному выбору профильного уровня обучения физике в старшей школе как показатель становления начальных профессиональных устремлений учащихся.
Итак, в данном параграфе рассмотрены подходы к внедрению образовательной робототехники в учебно-воспитательный процесс средней школы, определены основные регулятивы построения общей модели обучения. Разработана трехкомпонентная модель включения робототехники как области технической инноватики в содержание политехнической подготовки учащихся по физике. Дана характеристика ее составляющих. Рассмотрены уровни изучения основ робототехники при обучении физике в средней школе.
ГЛАВА 2. МЕТОДИКА ПРИМЕНЕНИЯ ОБРАЗОВАТЕЛЬНОЙ РОБОТОТЕХНИКИ В ОБУЧЕНИИ ФИЗИКЕ
2.1. Робот как объект изучения в курсе физики средней школы
Робот в учебном процессе – это, прежде всего, сложный (междисциплинарный) технический объект, устройство и принцип действия которого есть область приложения знаний целого комплекса наук. Элементная база робототехники является показателем уровня развития технической культуры общества и включает в себя различные технические изобретения: начиная с рычага и колеса и заканчивая самыми современными рукотворными объектами, созданными благодаря открытиям не только в области физики, но и смежных областях научного знания (математике, информатике, биологии, физиологии, химии, медицине и др.), а также в рамках новых направлений развития
современной науки (биомеханики, нейрокибернетики и др.).
В главе 1 нами были выделены базовые составляющие междисциплинарной образовательной программы по робототехнике. В настоящем параграфе будут рассмотрены содержание и особенности изучения предметного модуля по образовательной робототехнике (физика).
Анализ элементной базы роботов различных видов и, прежде всего, роботов, созданных на базе наборов по образовательной робототехнике, позволяет утверждать, что заметная часть явлений и законов, лежащих в основе работы их различных узлов, изучается в школьном курсе физики. Так, например, при изучении звуковых явлений целесообразно познакомить школьников с устройством и принципом действия ультразвукового датчика расстояния, который работает по принципу эхолота и используется практически во всех робототехнических конструкторах. При изучении электромагнитных явлений полезно рассмотреть устройство и принцип действия электродвигателей (сервомоторов) и их разновидностей, с помощью которых обеспечивается движение роботов и выполнение ими различных механических манипуляции. Можно привести не один десяток подобных примеров.
Для обеспечения системного подхода к анализу содержания школьного курса физики в направлении оценки его возможностей в демонстрации научных основ робототехники воспользуемся представлениями о структуре ее элементной базы. Данная структура определяется структурой кибернетической модели робота (рис. 2).
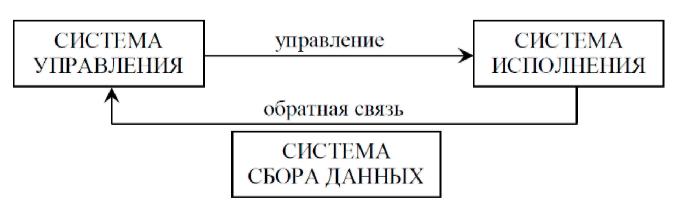
Рис 2. Кибернетическая модель робота
Робот с точки зрения теории управления включает три основных компонента: систему управления, систему исполнения и систему сбора данных. Рассмотрим структуру элементной базы робототехники.
Исполнительные устройства (ИУ) состоят из приводов, промежуточных передач и рабочего органа.
П р и в о д ы (совокупность устройств, предназначенных для приведения в действие машин и механизмов), имеют несколько разновидностей: электрический, гидравлический, пневматический. Наиболее используемым на сегодня является электрический привод.
П е р е д а ч и тоже имеют разновидности: передачи зацеплением (зуб
чатая, реечная, червячная, цепная, волновая, планетарная др.) и передачи трением (фрикционная, ремённая и др.). Используются в ряде случаев магнитные передачи. При передаче движения от одних частей устройства к другим используются как элементы простых механизмов (рычаги, блоки и др.) так и более сложные механизмы: изменяющие вид движения (кривошипно-шатунные механизмы, кулисные механизмы, кулачковые механизмы, шарнирно-рычажные механизмы); изменяющие скорость и направление вращения (редукторы, коробки передач, карданы, дифференциалы и др.).
Р а б о ч и е о р г а н ы роботов выполняются в виде манипуляторов, захватов, держателей, колёс, гусениц и других элементов.
Рассмотрение физических принципов работы исполнительных устройств относится в значительной степени к области механики и мехатроники. Простые механизмы – одна из тем школьного курса механики, в рамках которой могут изучаться эти устройства. Могу быть задействованы и другие учебные темы по механике (кинематика, динамика, статика, колебательное движение, законы сохранения). Используются знания раздела «Электродинамика».
Основные элементы исполнительных устройств, а также физические явления и законы их протекания, на основе которых может быть раскрыт принцип действия этих устройств, приведены в таблице 1. В ней сопоставлены элементы ИУ и темы курса физики различных классов, в которых возможно их изучение. Если принцип действия какого-либо устройства в основном курсе физики не изучается, то знакомство с ним может в ряде случаев осуществляться в специальных курсах по выбору.
Важно указать на направления реализации межпредметных связей при изучении научных основ работы исполнительных устройств. Большое значение в создании общей конструкции имеет правильное использование способов крепления деталей и механизмов между собой: опор, подшипников, упоров и пр. Эти элементы исполнительных устройств изучаются в курсе технологии. Принципиально новым по отношению к содержанию данного курса является изучение автоматических рабочих органов роботов.
Таблица 1. Изучение исполнительных устройств робота в школьном курсе физики
| | Элемент робота | Физическое явление, закон, объект техники | Тема курса физики | Класс |
| | Электродвигатель | Электродвигатель постоянного тока | Электромагнитные явления | 8 |
| Шаговый электродвигатель | Электромагнитные явления | 8, 11 | ||
| Вибродвигатель | Электромагнитные явления | 8 | ||
| Электродвигатель переменного тока | Производство, передача и использование электрической энергии | 11 | ||
| Гидравлический привод | Закон Паскаля, гидравлический пресс | Давление твёрдых тел, жидкостей и газов | 7 | |
| Пневматический привод | Закон Паскаля | Давление твёрдых тел, жидкостей и газов | 7 | |
| | Передачи зацеплением | Изменение угловой скорости вращения | Кинематика движения по окружности. Вращение твёрдого тела. | 9 |
| Передачи трением | Трение покоя | Силы в механике. Сила трения | 7, 9 | |
| Рычаги, блоки, винтовая и червячная передачи | Золотое правило механики | Простые механизмы | 7 | |
| Опоры: шарнир, подшипник, шаровая опора и др. | Трение скольжения, качения. Вязкое трение. | Силы в механике. Сила трения | 7, 9 | |
| Сложные механизмы | Прямолинейное и криволинейное движение | Кинематика | 7, 9, 10 | |
| | Генератор постоянного тока | Явление электромагнитной индукции | Производство, передача и использование электроэнергии | 8 |
| Манипуляторы, захваты, держатели, колёса, гусеницы | Движение по прямолинейной и криволинейной траектории, Механизмы захвата и удержания тел | Кинематика. Динамика (силы). | 7, 9, 10 |