Добавлен: 04.12.2023
Просмотров: 177
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
3.8 Расчет амортизационных отчислений…………………………...110
3.9 Расчет срока окупаемости капитальных вложений……………112
4.3 Расчет искусственного освещения релейного помещения
ГАЦ-МН…………………………………………………………………….117
1.2 Предпосылки автоматизации производственного процесса на
Микроконтроллер сбрасывается при появлении питания на плате схемы сброса. Кроме того сигнал сброса вырабатывается при отсутствии несущей в линии связи на входе модема. Таким образом при отсутствии несущей плата находится в состоянии ожидания (покоя). При наличии несущей МК поддерживает на банке конденсаторов начальное значение напряжения. Микроконтроллер контролирует напряжение на банке с помощью встроенного АЦП ( вход Р101 порта Р10 ) и, в случае если оно меньше заданного, тогда включает ключ заряда, если больше – ключ разряда. Резисторами R ограничивается ток заряда и разряда. При поступлении с линии связи команды запроса расстояния МК анализирует адрес, содержащийся в команде.
Если этот адрес совпадает с установленным на адресных перемычках, то он выдает в линию связи расстояние, рассчитанное по предыдущей команде. Если нет, то продолжает поддерживать на банке начальное значение напряжения. В начальный момент времени после снятия сигнала сброса расстояние равно нулю. Затем МК, управляя усилителем мощности и коммутатором РЦ, выдает в рельсовую цепь пачку зондирующих импульсов разной полярности. Фаза импульсов привязана к фазе питающей сети. Привязка осуществляется сигналом “50 Гц”, поступающим с формирователя на вход Р84 порта Р8 МК. Напряжение с входа рельсовой цепи через усилитель U РЦ поступает на АЦП U. При наличии импульсов в РЦ появляется ток. На датчике тока Ri возникает падение напряжения пропорциональное силе тока в РЦ. Это напряжение через усилитель I РЦ поступает на вход АЦП I и вход схемы контроля тока. Периодически запуская АЦП I и АЦП U на преобразование сигналом “STA” с выхода Р106 порта Р10, МК считывает с их выходов в порты Р0-Р3 коды, соответствующие току и напряжению в РЦ. Амплитуда импульсов в РЦ определяется напряжением на выходе усилителя мощности. На вход усилителя мощности поступает напряжение с выхода ЦАП МК (выход Р93 порта Р9). Если ток достигает максимального значения, то схема контроля тока закрывает коммутатор РЦ и импульс прекращается. МК таким образом устанавливает напряжение на выходе ЦАП, чтобы сила тока после окончания переходного процесса приближалась к максимальному значению но не достигала его.
Одновременно МК поддерживает на банке конденсаторов напряжение достаточное для нормальной работы усилителя мощности. Схема контроля мощности отслеживает разницу напряжений между выходом усилителя мощности и напряжением его питания. Если эта разница превысит максимально допустимое значение
, то схема контроля мощности выключает ключ заряда независимо от микроконтроллера. Схема контроля температуры контролирует температуру силовых элементов платы. Если температура превысит максимально допустимое значение, то схема контроля температуры выключает ключ заряда независимо от МК. Для получения оптимального значения тока микроконтроллер в начале пачки выдает в РЦ пробные импульсы, а затем, после расчета оптимального напряжения на выходе ЦАП – рабочие. Получив множество значений напряжения и тока в РЦ на нескольких импульсах, МК рассчитывает усредненные индуктивность, сопротивление РЦ и сопротивление балласта.
Если сопротивления находятся в пределах норм, то рассчитывается расстояние по индуктивности и удельной индуктивности. Полученное значение расстояния сохраняется. Если сопротивления выходят за пределы норм, то микроконтроллер формирует код ошибки. Код ошибки создается также при обнаружении неисправности аппаратуры. При получении следующей команды запроса с адресом, соответствующим установленному перемычками, микроконтроллер выдает в линию связи код расстояния или код ошибки. При выдаче кода расстояния старшие 6 разрядов второго байта равны 0. При выдаче кода ошибки младший байт равен 0, а в старшем находится код ошибки [6].
К преимуществам КЗП-ИЗ можно отнести:
- минимальный расход кабеля;
- небольшой вес и габариты аппаратуры;
- малое энергопотребление.
КЗП-ИЗ присущи их общие недостатки:
- зависимость точности измерения от сопротивления рельсовой линии, стыковых соединителей, балласта, клеммных соединений;
- неработоспособность при сильном загрязнении колес и поверхностей катания рельсов, а также чувствительность к состоянию изолирующих стыков;
- статический контроль местоположения только последнего вагона на пути;
- необходимость сезонных регулировок и большие эксплуатационные расходы на техническое содержание напольных устройств КЗП [5].
2.2.9.5 Контроль заполнения путей с использованием
индуктивно-проводных датчиков
Для контроля заполнения путей таким способом в системе КЗП ИД используются индуктивно-проводные датчики ИПД (генераторные датчики). В основе работы ИПД заложен эффект близости. Он характеризуется тем, что под действием массы тела изменяются параметры внешней среды, которые контролируются чувствительным датчиком.
При появлении вагона в зоне контроля происходит изменение магнитных свойств среды, что приводит к изменению реактивных составляющих полного сопротивления катушки датчика. В качестве приемной катушки используется индуктивный шлейф ИШ, выполненный с помощью кабеля. Он укладывается на подошвы рельсов внутри колеи в виде прямоугольной рамки. Жилы кабеля соединяются последовательно друг с другом, образуя требуемое число витков индуктивного контура. Полученный контур является чувствительным элементом датчика.
Наличие вагона над ИШ приводит к срыву генерации и пропадания сигнала на выходе датчика.
Индуктивно-проводной датчик состоит из:
- путевого индуктивного шлейфа ИШ;
- электронного модуля ЭМ, устанавливаемого в электронный блок БЭ;
- линий связи.
Два ИПД располагаются в путевом блоке ПБ непосредственно у рельсового пути (Рисунок 2.19).
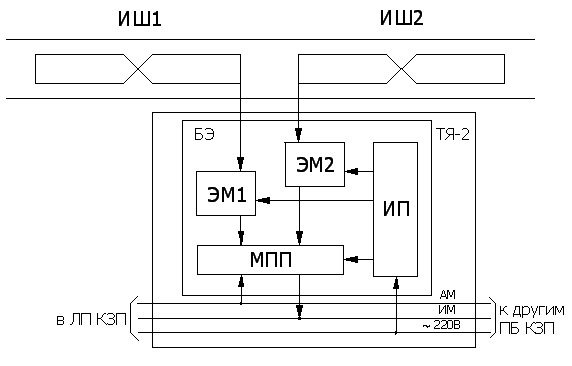
Рисунок 2.19 – Структурная схема ИПД
Электронный блок состоит из:
- задающего генератора (содержащего LC-контур);
- согласующего каскада;
- компаратора напряжения (является одновременно формирователем прямоугольных импульсов);
- выходных каскадов;
- разделительного трансформатора
- источника питания.
Путевые устройства ИПД так же содержат межрельсовые переходы для укладки кабеля петли и промежуточные концевые захваты для фиксации кабеля относительно рельса.
Контролируемый путь делится на участки с ИШ длиной 22 м, расстояния между участками 3 м. Два соседних участка контролируются одним ПД. Каждому путевой датчик имеет свой адрес. Нечетного пути присваиваются адреса с 1-го по 9-ый, а четного пути с 10-го по 18-ый. Отсчет ведется от парковой тормозной позиции. Входы путевых датчиков четного и нечетного путей подключены к одной адресной магистрали АМ. Выходы датчиков (контролирующих нечетные участки этих путей) подключены к нечетным информационным магистралям. Выходы датчиков (контролирующих четные участки двух путей) подключены к четным информационным магистралям.
Работа КЗП осуществляется следующим образом. На входы датчиков по АМ из формирователя информации ФИ линейного пункта КЗП поступает запрос в виде кодовой посылки, содержащей адрес датчика. Если адрес датчика совпадает с кодом запроса, то его выходы подключаются к соответствующим информационным магистралям (ИМ1 - ИМ24).
Выходные сигналы одноименных датчиков, содержащие информацию о состоянии контрольных участков путей, по информационным магистралям передаются в ФИ линейного пункта КЗП. В линейном пункте КЗП формируется кодовая посылка, содержащая код адреса опрашиваемой группы одноименных датчиков и информацию о состоянии контролируемых ими участков. Кодовая посылка по информационной магистрали ИМ в биполярном последовательном коде передается в центральный пост КЗП. В это время в ФИ формируется новый запрос с адресом датчика на единицу больше предыдущего и опрашивается следующая группа ПД. Информация от этих датчиков передается по информационным магистралям в ФИ линейного пункта КЗП, а оттуда на входы контроллера КЗП. После опроса датчиков с адресом «18» ФИ начинает новый цикл опроса с адреса «1». Время опроса всех датчиков КЗП составляет 1,3 с. На мониторе контроллера КЗП отражается информация о состоянии контролируемых участков сортировочных путей и осуществляется передача этой информации во внешние вычислительные устройства центрального поста КЗП.
Достоинства КЗП - ИПД:
- простота конструкции и низкая стоимость оборудования;
- независимость от погодных условий;
- отсутствие ограничений на размещение оборудования по условиям габарита;
- обеспечение требований CЦБ по условиям безопасности движения;
- непрерывность процесса контроля присутствия вагонов на контролируемом участке [7].
2.2.9.6 Радиолокационный метод контроля заполнения путей
Система радиолокационного контроля заполнения путей в сортировочном парке РЛС КЗП является относительно новой разработкой. В структуре применяются радиолокационных станций малого радиуса действия. Используются высокоинформативные сверхширокополосные радиолокаторы, которые позволяют вести периодический контроль за ограниченными участками наблюдаемой территории. Радиолокатор системы ведет наблюдение в зоне ограниченной шириной его диаграммы направленности. Зоны радиолокаторов пересекаются и образуют единую зону наблюдения, которая охватывает весь парк заполнения протяженностью до 1000 метров. Комплекты таких радиолокационных измерителей РИ выдают информацию в систему обработки и управления СОУ и образуют систему РЛС-КПЗ (рисунок 2.20).
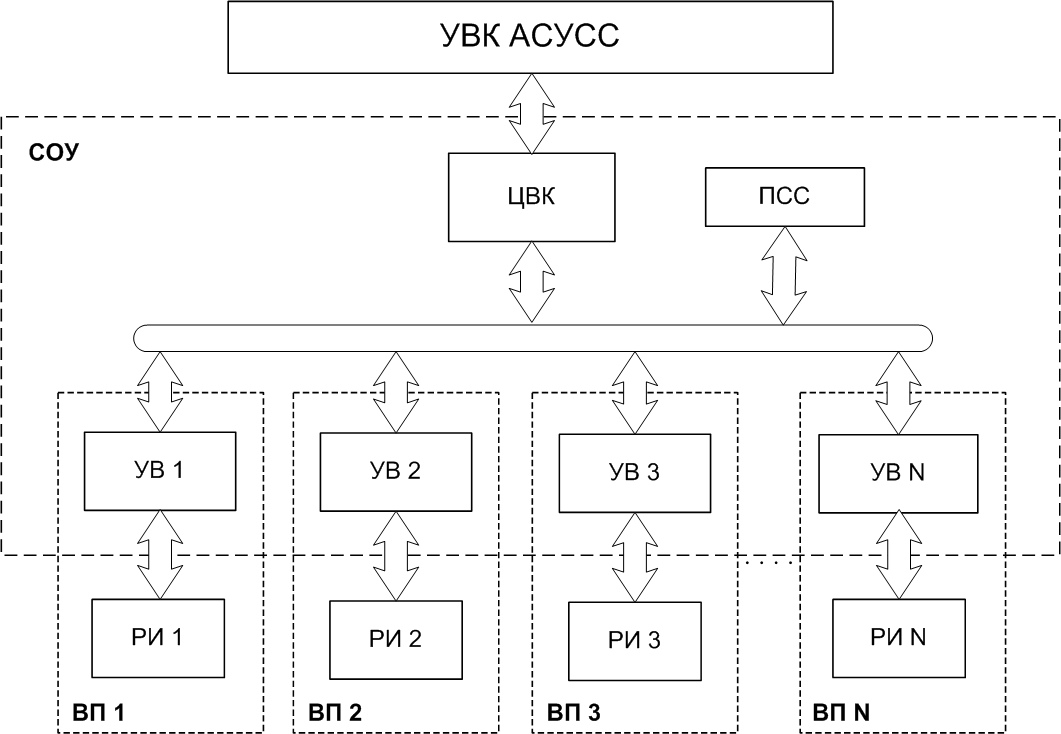
Рисунок 2.20 – Структурная схема РЛС КЗП
СОУ осуществляет основные вычислительные операции обработки информации и управления. Формирует:
- траекторию движения отцепов по пути сортировочного парка;
- информацию о положении точки прицеливания;
- информацию о месте остановки отцепа;
- информацию о длине свободного пробега до стоящего отцепа;
- информацию о суммарной длине промежутков между стоящими не сцепленными единицами подвижного состава.
СОУ производит взаимодействие с существующими системами и УВК АСУСС, а также формирует команды управления РИ и обрабатывает полученные результаты.
Система СОУ является многопроцессорной и территориально распределенной. Она включает в себя:
- центральный вычислительный комплекс ЦВК (в «пункте управления горкой»);
- удаленные вычислители УВ;
- подсистему связи и синхронизации ПСС.
Радиолокационные измерители являются основными элементами системы и организуют непосредственное наблюдение за контролируемой территорией. РИ по сигналам управления от СОУ обеспечивает обзор контролируемого пространства на задаваемой дальности и выдачу сигналов из строба с этой дальности в СОУ в цифровом виде для последующей обработки.
Количество радиолокационных измерителей задает размер зоны контроля, производительность (количество одновременно сопровождаемых отцепов) и точность системы.
Система функционирует независимо от:
- состояния путей сортировочного парка;
- состояния подвижного состава;
- погодных условий (дождя, тумана, снега).
К недостаткам можно отнести зависимость точности определения положения отцепов на малых скоростях (до 1,5км/ч), что определяется физическими возможностями используемых радиолокаторов.