Добавлен: 04.12.2023
Просмотров: 180
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
3.8 Расчет амортизационных отчислений…………………………...110
3.9 Расчет срока окупаемости капитальных вложений……………112
4.3 Расчет искусственного освещения релейного помещения
ГАЦ-МН…………………………………………………………………….117
1.2 Предпосылки автоматизации производственного процесса на
2.2.3 Радиотехнический датчик
Горочные рельсовые цепи не могут исключить перевод стрелки под длиннобазным вагоном, у которого расстояние между осями внутренних колес превышает длину стрелочной рельсовой цепи. Это требует дополнения стрелочных рельсовых цепей радиотехническими датчиками.
Радиотехнические датчики (РТД) обеспечивают пространственный контакт с обнаруживаемыми транспортными средствами и могут работать в двух режимах обнаружения:
- прием отраженного сигнала;
- экранирование сигнала, излучаемого передатчиком.
Радиотехнический датчик контроля свободности стрелочных участков (РТД-С) предназначен для фиксации наличия отцепов на стрелочных участках сортировочных горок в системах ГАЦ.
РТД могут работать в двух режимах обнаружения:
- прием отраженного сигнала (канал отраженного сигнала КОС);
- экранирование сигнала подвижным составом (канал прямого сигнала КПС).
РТД-С состоит из передатчика и двух приемников. Для осуществления контроля в РТД-С используется радиоканал СВЧ диапазона. Это обосновано тем, что влияние запыленности, тумана, дождя, снега на волны этого диапазона тем меньше, чем больше неравенство А>r (А - длина волны излучаемого колебания, r- радиус частиц метеорологического происхождения).
РТД-С состоит из двух основных модулей - приемного и передающего. Модули устанавливают на крепежные стойки, расположенные в зоне стрелочного участка (рисунок 2.5). Приемник, крепится внизу стойки. Он является основным и используется для контроля всех типов вагонов с хребтовой балкой.
Рисунок 2.5 – Размещение РТД-С в зоне стрелочного участка
На сортировочных горках для сдвоенных стрелок есть возможность расположить три ПРМ на одной стойке, что приводит к улучшению характеристик для обнаружения подвижной единицы.
Схема РТД с двумя КПС предполагает размещение одного передающего и двух приемных модулей на противоположных сторонах участка.
При свободности участка вырабатываемый генератором сверхвысоких частот СВЧ- сигнал излучается передающей антенной А1 по КПС воспринимается антеннами А2 и А3 приемных модулей. РУ, обрабатывает полученные сигналы и формирует сигнал Х4. Этим регистрируется отсутствие транспортного средства. Полное или частичное экранирование подвижным составом приводит к отсутствию сигнала на приемных антеннах, что в свою очередь говорит о занятости участка.
Рисeнок 2.6 – Структурная схема двухканального варианта РТД в
режиме КПС
Выбор места расположения устройств на горочном плане для достоверного обнаружения отцепа в заданной границе контроля производится с учетом технических требований к РТД-С, длины стрелочного участка и реальных габаритов подвижного состава. Главными требованиями при выборе координат размещения стоек РТД-С на стрелочном участке:
- въезд первой оси колесной пары на границу предстрелочного защитного участка должен быть зарегистрирован как занятость стрелочного перевода;
- выезд последней оси колесной пары вагона за остряки должен быть зарегистрирован как освобождение участка контроля.
2.2.4 Устройство счета осей
Использование надежных, не требующих частой регулировки устройств счета осей УСО позволяет снизить трудозатраты на техническое обслуживание, а так же финансовые затраты.
УСО предназначено для распознавания осей вагонов и определения направления их движения, при этом производить контроль исправности элементов устройства.
Устройство считывания осей состоит из:
- индуктивного датчика ИД, располагаемого на путях;
- преобразователя сигналов, установленного в путевом ящике.
Индуктивный датчик представляет собой многоконтурный обнаружитель, который позволяет обнаруживать подвижной состав и фиксировать направление его движения.
ИД состоит из двух частей:
- первичного преобразователя датчика;
- преобразователя сигналов ПС (в напольном ящике).
Первичный преобразователь датчика представляет собой совокупность трех катушек индуктивности без сердечника КИ1, КИ2, КИ3, который прикрепляется к рельсу. Катушки КИ1 и КИ3 (рабочие), располагаются в корпусе горизонтально, их плоскости намотки параллельны рельсу, а третья, вспомогательная, располагается между ними и ее плоскость перпендикулярна плоскости других катушек индуктивности. В результате преобразователь сигнала датчика строится по трехканальной схеме.
Два канала ПС (рабочие), выполняют функции счетчиков осей движущегося вагона. Они симметричны и включают в себя:
- резонансные каскады РК1 и РК2;
- компараторы сигналов К1 и К2;
- дискретные делители частоты сигнала Д2 и Д4;
- каскады оптоэлектронной развязки ОР1 и ОР3;
- индикаторы состояния каналов И1 и И3;
- выходные цепи передачи сигналов на пост ЭЦ – ВЫХ.СЧ1 и ВЫХ.СЧ.2.
Третий канал имеет функции контроля работоспособности датчика и включает в себя те же функциональные узлы, что и основные каналы.
Ориентация индуктивности катушек датчика такова, что колесные пары вагона поочередно проезжают над катушкой КИ1, а затем над катушкой КИ3 в одном направлении, либо наоборот при обратном движении. В момент проезда колесной пары над соответствующей катушкой, регистрируется сигнал с соответствующего счетного выхода одного из каналов СЧ1, или СЧ2. Фиксация направления движения транспортного средства происходит в зависимости от очередности во времени появления счетных импульсов с выхода первой или второй катушек КИ1, КИ3.
Рисунок 2.7 – Функциональная схема УСО-М
На посту ЭЦ в управляющем вычислительном комплексе ведется обработка поступающих с датчиков сигналов по алгоритму счета осей колесных пар, определению направления движения отцепа, занятости или свободности контролируемого участка.
Работа вспомогательного канала, который регистрирует исправное состояние датчика, не прекращается даже при въезде колесной пары в зону действия датчиков.
Преобразователь сигналов состоит из ячеек преобразования сигналов датчиков (18 штук), блока преобразователей ПС1, ячейки контроллера преобразователя сигналов КПС.
В блоке преобразователей ПС1 размещено следующее оборудование:
- ячейка контроллера преобразователя сигналов КПС, совмещенная с блоком питания преобразователей;
- ячейки преобразователя сигналов датчиков ПС50М1.
Рисунок 2.8 – Структурная схема преобразователя сигналов
2.2.5 Управление стрелочным электроприводом СПГБ-4Б
Стрелочные электроприводы необходимы для перевода, запирания и контроля положения стрелок электрической, диспетчерской и горочной централизации. Электроприводы устанавливают с правой или левой стороны стрелочных переводов на специальных гарнитурах.
Стрелочный перевод СПГБ предназначен для перевода централизованных стрелок в повторно-кратковременном режиме, запирания и контроля положения их в непрерывном режиме.
С июля 1995 года Брянским заводом был начат серийный выпуск бесконтактного горочного электропривода СПГБ-4Б, который пришел на смену СПГБ-4М.
СПГБ-4Б относится к электромеханическим, с внутренним запиранием, быстродействующим, невзрезным, бесконтактным электроприводам. Высокое быстродействие достигается сочетанием максимального управляющего воздействия по напряжению с уменьшенным передаточным числом редуктора до 35,7 за счет уменьшения числа зубьев шестерен в первом каскаде редуктора [2].
В корпусе (1) электропривода расположены:
- электродвигатель (8);
- уравнительная муфта (7);
- редуктор (6);
- зубчатое колесо с упором (5);
- блок главного вала с бесконтактным автопереключателем (4);
- контрольные линейки (3);
- шибер (2);
- блокировочное устройство (9).
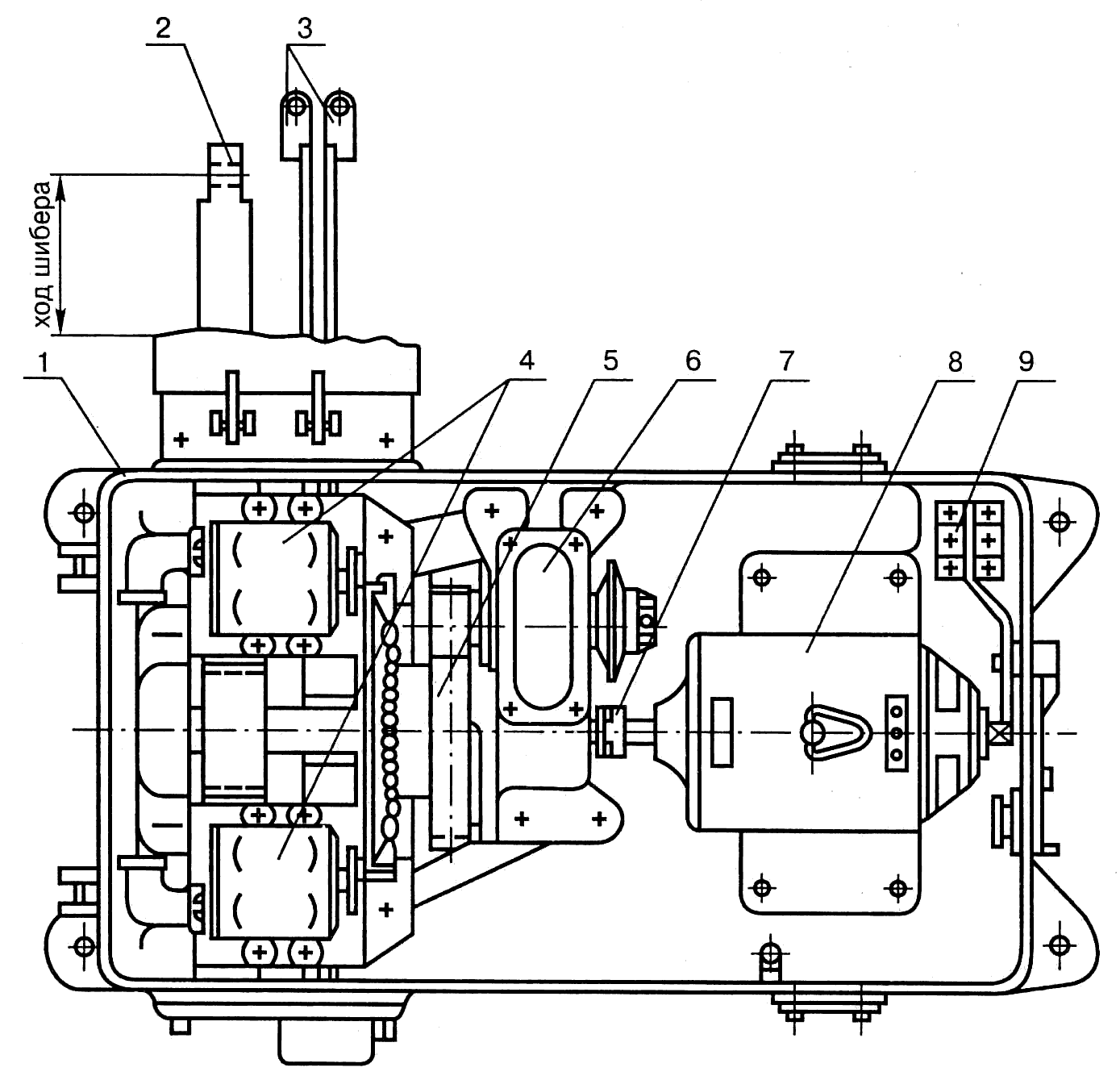
Рисунок 2.9 – Электропривод стрелочный бесконтактный типа
СПГБ-4Б
Горочные электроприводы СПГБ имеют бесконтактные автопереключатели. Каждый датчик автопереключателя заключен в литой корпус, внутки которого находится трехполюсной статор (1) и ротор-сектор (2), который вращается за счет поводка.
На полюсах статора располагаются питающая (4) и компенсационная (5) обмотки (на них подается напряжение питания), а так же сигнальная (3), с которой снимается выходное напряжение.
Рисунок 2.10 – Схема бесконтактных датчиков
Угол поворота ротора-сектора изменяется поводком, положение которого может быть проверено по шкале на крышке датчика. При втянутом положении шибера ротор-сектор левого датчика обеспечивает контроль переведенного положения (повернут на угол 120º±5º), а ротор-сектор правого датчика – контроль начального положения (занимает исходное положение, угол 0º±5º). При взрезе стрелочного перевода ротор-сектор повернут на угол 60º±10º и выполняет контроль среднего положения.
С помощью этих датчиков производится контроль положения стрелки и определение неисправности по причине взреза.
Рисунок 2.11 – Принципиальная схема бесконтактного
автопереключателя
Выпускающийся в настоящее время электропривод СПГБ-4Б, согласно действующим техническим условиям, должен обеспечивать потерю контроля положения стрелки:
- при рассоединении одной из контрольных тяг с остряком, последовавшего после появления дефекта перевода стрелки и возвращения затем стрелки в исходное положение;
- при ходе линейки ближнего остряка на 10 мм больше хода шибера;
- при изгибе контрольной тяги отжатого остряка и частичном вытягивании при этом линейки дальнего остряка из корпуса на величину более 25 мм;
- при переводе после этого стрелки в другое крайнее положение (шибер выдвинут) контроль положения стрелки должен отсутствовать, если предварительное вытягивание линейки дальнего остряка из корпуса не превышает 360 мм [2].
Электроприводы выпускаются в различных модификациях в зависимости от типа электродвигателя и варианта сборки (в зависимости от места расположения привода относительно пути).
Горочные бесконтактные электроприводы СПГБ-4Б оборудуются электродвигателем постоянного тока типа МСП-0,25. Номинальная мощность этого двигателя составляет 250 Вт, напряжение питания 100 В.