Файл: петербургский государственный университет путей сообщения императора александра i.docx
Добавлен: 04.12.2023
Просмотров: 82
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ФЕДЕРАЛЬНОЕ АГЕНСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ
СООБЩЕНИЯ ИМПЕРАТОРА АЛЕКСАНДРА I»
(ФГБОУ ВО ПГУПС)
Факультет «Транспортные и энергетические системы»
Кафедра «Наземные транспортно-технологические средства»
Курсовая работа по дисциплине
«Теория машин и механизмов»
Вариант
Выполнил студент:
Группа: ПТМ
Курс:
Факультет: БФО
Преподаватель:
Санкт-Петербург 2023
Оглавление
Введение 3
Исходные данные 4
2 Структурное исследование механизма 5
3 Кинематический анализ 8
3.1 Построение схемы механизма 8
3.2 Построение планов скоростей механизма 9
3.2 Построение планов ускорений механизма 11
4 Силовой расчет рычажного механизма 15
4.1 Определение сил и моментов, приложенных к механизму 15
4.2 Определение уравновешивающей силы методом Жуковского 16
5 Проектирование эвольвентного зацепления 18
Список литературы 21
Приложения 22
Введение
Объектом исследования является механизм двигателя внутреннего сгорания. Механизм двигателя внутреннего сгорания включает в себя различные механизмы, из которых исследованию подлежат – рычажный и зубчатый.
Рычажный механизм служит для преобразования возвратно-поступательное перемещение поршня во вращательное движение кривошипа.
От кривошипа вращательное движение передается через зубчатую передачу z1 и z2. В рычажных механизмах угловая скорость непостоянна и для более равномерного движения на валу кривошипа установлен маховик.
В данной курсовой работе необходимо произвести:
-
Провести структурный, геометрический, кинематический и силовой расчёт механизма и определить уравновешивающий момент .
. -
Выполнить кинематический расчёт редуктора. -
Определить размеры зубчатых колёс редуктора. -
Построить картину зубчатого эвольвентного зацепления.
Исходные данные
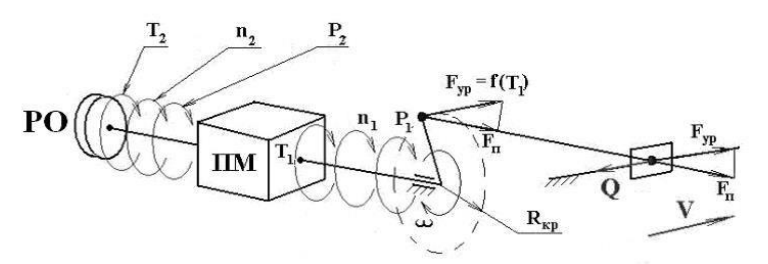
Рис.1.1. Схема механизма
| Вариант | Сила, действующая на поршень Q(H) | Число оборотов коленчатого вала  , ,(об/мин) | Длина звена ОА (м) | Длина звена АВ, (м) | Масса звена ОА (кг) | Масса звена АВ (кг) | Масса звена В (кг) |
| В-04 | 660 | 900 | 0,25 | 1,4 | 0,4 | 1,5 | 2 |
2 Структурное исследование механизма
Выполним структурный анализ рычажного механизма, определим его подвижность и класс.
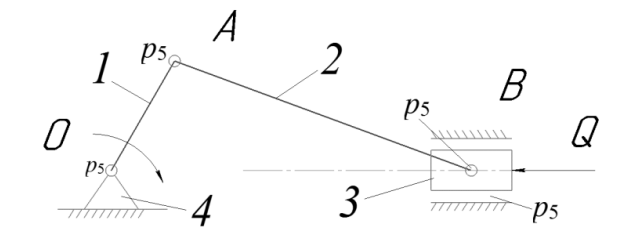
Рис. 2.1. Структурная схема рычажного механизма
Проанализируем звенья механизма, а также вид совершаемого ими движения, кинематические пары, соединяющие эти звенья (рис. 2.1), все данные занесём в таблицы:
Таблица 2.1 Звенья механизмов
| № звена | Характер движения | Наименование |
| 1 | вращательное | кривошип |
| 2 | Плоско-параллельное | шатун |
| 3 | поступательное | ползун |
| 4 | неподвижна | стойка |
Таблица 2.2 Кинематические пары механизмов
| № звена | Класс пары | Вид пары |
| 1-2 | р5 | вращательная |
| 2-3 | р5 | вращательная |
| 3-4 | р5 | вращательная |
| 4-1 | р5 | поступательная |
Т.к., данный механизм является плоским, то подвижность механизма определим по формуле Чебышева:

где
 — число подвижных звеньев, в данном механизме их 3 (табл. 1.1);
— число подвижных звеньев, в данном механизме их 3 (табл. 1.1); — число одноподвижных кинематических пар 5 класса, в данном механизме их 4 (табл. 2.2);
— число одноподвижных кинематических пар 5 класса, в данном механизме их 4 (табл. 2.2); — количество двухподвижных пар 4 класса, в данном механизме их нет (табл. 1.2).
— количество двухподвижных пар 4 класса, в данном механизме их нет (табл. 1.2). .
.Схема любого плоского механизма может быть создана последовательным присоединением к ведущему звену и стойке кинематических цепей, которые не изменяют подвижность механизма. Разобьем данный рычажный механизм на структурные группы, т.е., на простейшие кинематические цепи с нулевой подвижностью относительно тех звеньев, с которыми входят в кинематические пары V кл. свободные элементы их звеньев, и не распадающиеся на более простые кинематические цепи с нулевой подвижностью.
На рисунке 2.3 изображены структурные группы механизма.
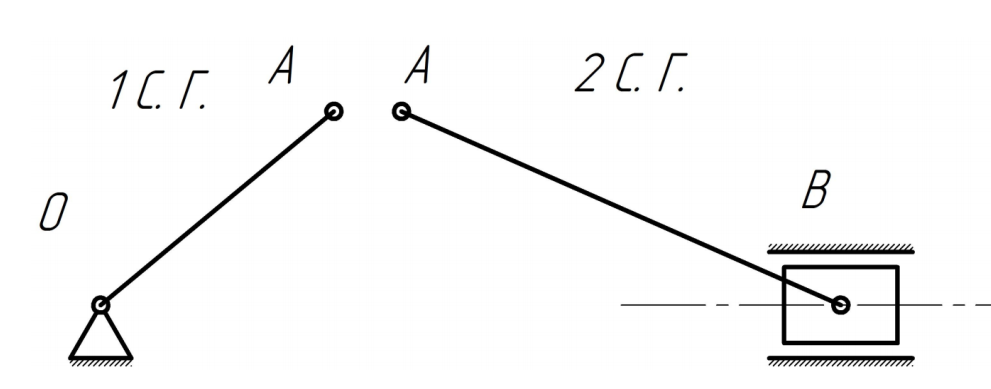
Рис. 2.2 Структурные группы механизма
Запишем формулу строения механизма в порядке соединения:
I(1,4)→II(2,3)
Класс механизма определяется наивысшим классом входящих в него структурных объектов. Т.е., данный механизм является механизмом II класса.
3 Кинематический анализ
3.1 Построение схемы механизма
Приняв на чертеже отрезок
 , находим масштаб механизма:
, находим масштаб механизма:
где ???????????? — истинная длина звена в метрах
,
OA — изображение этого звена на чертеже в миллиметрах.
Схема позволяет определить движение ведомых звеньев по заданному движению ведущих. Кинематические пары обозначают большими буквами латинского алфавита. Звенья обозначают арабскими цифрами, начиная с кривошипа.
Планом механизма называется графическое изображение в масштабе кинематической схемы механизма, соответствующее определенному положению главного звена (в данном случае – кривошипа OA).
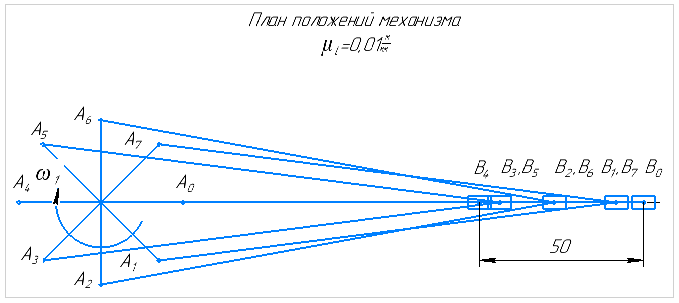
Рис 3.1 План положений механизма
Для построения 8 положений звеньев механизма разделим траекторию, описываемую точкой А кривошипа, на 8 равных частей. В качестве нулевого принимаем то положение кривошипа, при котором точка В ползуна занимает крайнее верхнее положение. Из отмеченных на окружности точек А0, А1…А5 проводим дуги радиуса
 намечаем на линии движения ползуна B точки B0, B1…B7, и соединяем их соответствующим образом.
намечаем на линии движения ползуна B точки B0, B1…B7, и соединяем их соответствующим образом.3.2 Построение планов скоростей механизма
Определим частоту вращения кривошипа:
Определяем скорость точки А.

Примем длину вектора
 , изображающего вектор скорости точки A, равной 50 мм. Тогда масштаб для плана скоростей:
, изображающего вектор скорости точки A, равной 50 мм. Тогда масштаб для плана скоростей:
В векторной форме составим уравнение для скорости точки B:

Под векторами указаны их направления. Далее, находим середину вектора
 , изображающего скорость
, изображающего скорость  , и отмечаем точку
, и отмечаем точку  конец вектора
конец вектора  , изображающего скорость центра тяжести шатуна
, изображающего скорость центра тяжести шатуна  . Планы скоростей представлены на рис. 3.2.
. Планы скоростей представлены на рис. 3.2.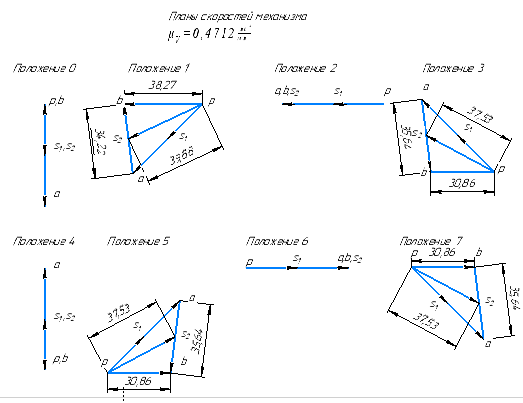
Рис. 3.2 Планы скоростей механизма
Скорости нужных точек и звеньев для положения 5 находим по формулам:
Угловая скорость звена 2:
Построение планов скоростей заданных положений проводим аналогично. Результаты всех построений и расчетов представлены в табл. 3.1 и 3.2.
Табл. 3.1 Отрезки с планов скоростей
| Положение | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 |
 | 25 | 25 | 25 | 25 | 25 | 25 | 25 | 25 |
 | 0 | 30,86 | 50 | 30,86 | 0 | 30,86 | 50 | 30,86 |
 | 25 | 37,53 | 50 | 37,53 | 25 | 37,53 | 50 | 37,53 |
 | 50 | 35,64 | 0 | 35,64 | 50 | 35,64 | 0 | 35,64 |
Табл. 3.2 Значения точек скоростей точек механизма
| Положение | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
 | 23,56 | 23,56 | 23,56 | 23,56 | 23,56 | 23,56 | 23,56 | 23,56 |
 | 11,78 | 11,78 | 11,78 | 11,78 | 11,78 | 11,78 | 11,78 | 11,78 |
 | 0 | 14,54 | 23,56 | 14,54 | 0 | 14,54 | 23,56 | 14,54 |
 | 11,78 | 17,69 | 23,56 | 17,69 | 11,78 | 17,69 | 23,56 | 17,69 |
 | 23,56 | 16,79 | 0 | 16,79 | 23,56 | 16,79 | 0 | 16,79 |
 | 16,83 | 11,99 | 0 | 11,99 | 16,83 | 11,99 | 0 | 11,99 |