Файл: петербургский государственный университет путей сообщения императора александра i.docx
Добавлен: 04.12.2023
Просмотров: 84
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Направление угловой скорости звена АВ определяется следующим образом. Переносим мысленно вектор bа с плана скоростей в точку В шатуна 2 и наблюдаем направление поворота этого звена вокруг точки А.
3.2 Построение планов ускорений механизма
Построение плана ускорений рассмотрим для положения механизма №5 . Так как кривошип ОА вращается с постоянной угловой скоростью, то точка А кривошипа будет иметь только нормальное ускорение, величина которого равна:

Ползун 3 совершает прямолинейное движение ,ускорение точки В будет равно
 и направлено по ОВ.
и направлено по ОВ.Векторное уравнение скорости точки В будет иметь вид:

Под векторами указаны их направления.
Для положения 5:

Вводим полюс плана ускорений
 .Из полюса
.Из полюса  откладываем вектор
откладываем вектор  в выбранном масштабе и получаем точку «a» из этой точки откладываем вектор
в выбранном масштабе и получаем точку «a» из этой точки откладываем вектор  (направлен по АВ в сторону точки А). Из точки n проводим вектор
(направлен по АВ в сторону точки А). Из точки n проводим вектор  (направлен перпендикулярно АВ). Из полюса откладываем направление ускорения
(направлен перпендикулярно АВ). Из полюса откладываем направление ускорения  и точка пересечения векторов и
и точка пересечения векторов и  дает нам точку пересечения «b». Длина отрезка
дает нам точку пересечения «b». Длина отрезка  дает нам величину ускорения точки В, а длина отрезка
дает нам величину ускорения точки В, а длина отрезка  . Отмечаем на отрезке
. Отмечаем на отрезке  середину S2 и получаем ускорение центра тяжести звена 2.
середину S2 и получаем ускорение центра тяжести звена 2.Примем длину вектора
 . Тогда, масштаб для плана ускорений:
. Тогда, масштаб для плана ускорений:
Рассчитаем

:
Ускорения нужных точек и звеньев находим по формулам:
Угловое ускорение звена 2:

Направлена
 по
по  из точки В.
из точки В.Планы ускорений представлены на рисунке 3.3.
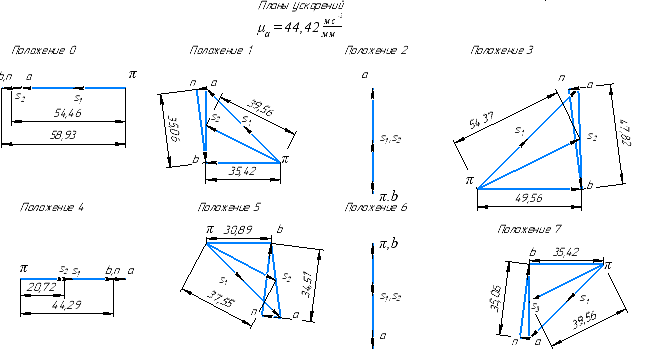
Рис. 3.3 Планы ускорений
Для остальных положений все расчеты и построения ведутся аналогично. Результаты всех построений и расчетов сведены в таблицу:
Таблица 3.1 — Значения ускорений в расчетных положениях
| Положение | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
 | 2221 | 2221 | 2221 | 2221 | 2221 | 2221 | 2221 | 2221 |
 | 1111 | 1111 | 1111 | 1111 | 1111 | 1111 | 1111 | 1111 |
 | 2618 | 1573 | 0 | 2201 | 1967 | 1372 | 0 | 1573 |
 | 2419 | 1758 | 1111 | 2415 | 920 | 1668 | 1111 | 1758 |
 | 0 | 1557 | 2221 | 2124 | 0 | 1533 | 2221 | 1557 |
 | 0 | 1112 | 1586 | 1517 | 0 | 1095 | 1586 | 1112 |
4 Силовой расчет рычажного механизма
4.1 Определение сил и моментов, приложенных к механизму
План нагрузок механизма предусматривает нанесение на его схему векторов сил, действующих в его шарнирах и центрах масс, на основании которых в дальнейшем находится мгновенное значение уравновешивающей силы.
При простейшем кинематическом анализе на план нагрузок наносятся вектора веса звеньев G, внешняя нагрузка Q, уравновешивающая сила FУР и инерционные нагрузки FИ. Вектора последних направляются противоположно ускорениям центров масс по плану ускорений.
Планы нагрузок представлены в графической части курсовой работы.
Центры тяжести звеньев (стержней)находятся на середины их длины. Центр тяжести ползуна совпадает с центров шарнира В.
Вес звеньев определяется по формуле:

Где
 – ускорения свободного падения.
– ускорения свободного падения.
Силы инерции звеньев вычисляются по формуле:

Где
 -ускорение центра масс i-ого звена.
-ускорение центра масс i-ого звена.Знак «-» показывает, что силы инерции направлены противоположно ускорению центра масс звена.
Моменты инерции звеньев относительно их оси вращения:
Вычислим силы инерции для 4 положений механизма (5,6,7,0):
Табл. 4.1 — Силы инерции
| Положение механизма | 5 | 6 | 7 | 0 |
 | 444 | 444 | 444 | 444 |
 | 2502 | 1666 | 2367 | 3629 |
 | 2744 | 0 | 3146 | 5236 |
 | 268 | 389 | 272 | 0 |
4.2 Определение уравновешивающей силы методом Жуковского
Соотношение между силами, приложенными к механизму (включая и силы инерции), можно получить с помощью вспомогательного рычага Жуковского.
Если какой-либо механизм под действием системы сил, приложенных к этому механизму, находится в равновесии, то повернутый на 90
 в сторону вращения уголовной скорости план скоростей, рассматриваемый как твердое тело, вращающегося вокруг полюса плана и нагруженное теми же силами, приложенными в соответствующих точках плана, также находится в равновесии. При этом, силы, приложенные к полюсу
в сторону вращения уголовной скорости план скоростей, рассматриваемый как твердое тело, вращающегося вокруг полюса плана и нагруженное теми же силами, приложенными в соответствующих точках плана, также находится в равновесии. При этом, силы, приложенные к полюсу  или пересекающие его не указываем, чтобы не загромождать рисунки.
или пересекающие его не указываем, чтобы не загромождать рисунки.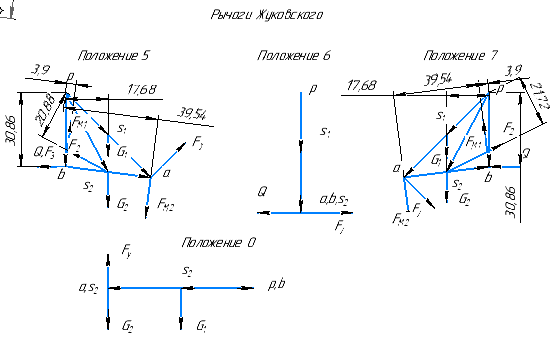
Рис. 4.1. Рычаги Н. Е. Жуковского.
Раскладываем момент инерции звена 2 на пару сил:

Табл. 4.2 Значение пары сил от момента инерции
| Положение механизма | 5 | 6 | 7 | 0 |
 | 191 | 278 | 194 | 0 |
Составим уравнения моментов сил относительно полюса
.Положение 5:

Положение 6:

Положение 7:

Положение 0:

Определяем уравновешивающий момент по формуле

Все вычисления приводим в таблицу 4.4:
Табл.4.4 Полученные результаты
| Положение механизма | 5 | 6 | 7 | 8 |
 | 830 | 165 | 287 | 4 |
 | 3318 | 660 | 1146 | 17 |
Наибольшую нагрузку по модулю кривошип испытывает в положении 5, поэтому расчет редуктора производим по этому значению.
5 Проектирование эвольвентного зацепления
По найденному максимальному значению уравновешивающей силы, приложенной к кривошипу, определяем вращающийся момент на входном валу привода:
Мощность на валу кривошипа:

Определим мощность на валу РРО:
Передаточное отношение редуктора принимаем по рекомендациям для одноступенчатых прямозубых редукторов. Принимаем
 .
.Рассчитаем частоту вращения валов редуктора:
Рассчитываем межосевое расстояние:

Где
 —коэффициент межосевого расстояния для цилиндрических зубчатых колес;
—коэффициент межосевого расстояния для цилиндрических зубчатых колес; коэффициент ширины колес относительно опор;
коэффициент ширины колес относительно опор; – передаточное число;
– передаточное число; – вращающий момента на тихоходном валу редуктора;
– вращающий момента на тихоходном валу редуктора; − допускаемое контактное напряжение колеса;
− допускаемое контактное напряжение колеса; коэффициент неравномерности по длине зуба.
коэффициент неравномерности по длине зуба.По ГОСТ 2185-66 выбираем ближайшее стандартное межосевое расстояние (ряд 1):
Принимаем
 .
.Определяем модуль зацепления:

Значение модуля округляется до стандартного числа согласно ГОСТ 9563-60.
Принимаем
 .
.Определим суммарное количество зубьев шестерни и колеса:
Примем
 .
.Число зубьев шестерни: