Файл: Практическая работа 13 тема Цель работы Изучение конструкции модулей движения Классификация мехатронных модулей.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 18
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ПРАКТИЧЕСКАЯ РАБОТА №13
ТЕМА:
Цель работы: Изучение конструкции модулей движения
Классификация мехатронных модулей
Целью любой классификации является систематизация информации о некотором объекте в виде упорядоченной структуры для выполнения задач объективного (обеспечение полноты информации) и сравнительного (обеспечение информацией для сравнения) представления объекта. Использование иерархической структуры позволяет упростить поиск интересующей информации об объекте. Это позволяет создать эффективные информационно-поисковые системы на базе компьютерных баз данных.
Классификация характеризуется объектом, признаками классификации и их последовательностью. Согласно классификации создаются образы объекта. Поэтому для одного и того же объекта в зависимости от выбранных признаков и их последовательности, можно построить разные варианты иерархического дерева, т.е. несколько различных классификаций. Выбор предпочтительной классификации осуществляется исходя из требований решения определенной задачи.
На рис. 2.1 представлена классификация мехатронных модулей по конструктивным признакам.
В данной классификации выделено 3 признака достаточно полно характеризующих конструкцию мехатронных модулей (уровень интеграции, число степеней подвижности и вид движений), а также комплекс признаков (технические характеристики), определяющий функциональные возможности модулей.
Классификация мехатронных модулей предусматривает по уровню интеграции: модули движения, мехатронные модули движения и интеллектуальные мехатронные модули. По числу степеней подвижности – 1, 2, 3, и > 3. По виду движений – поступательные и вращательные.
Комплекс признаков технических характеристик включает: развиваемую силу и крутящий момент; величину, быстродействие и точность рабочего хода (линейного и углового).
Рассмотрим мехатронные модули согласно представленной классификации.
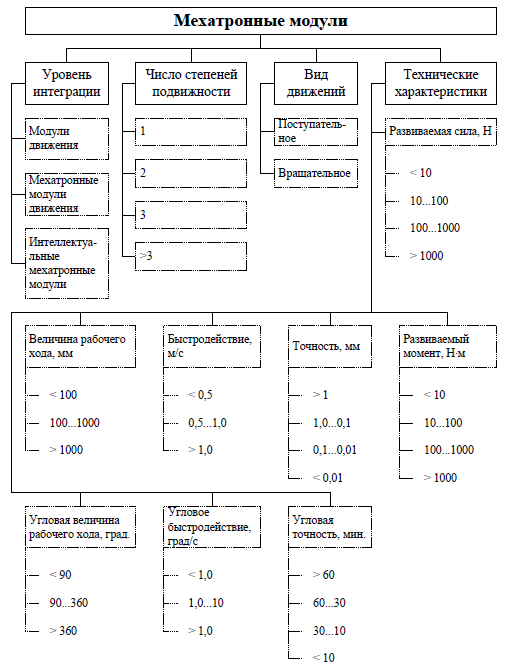
Рис. 2.1. Классификация мехатронных модулей
Преобразователи движения
Передача движения от двигателя к выходному звену мехатронного модуля может быть обеспечена с помощью различных преобразователей движения (передач), структура и конструктивные особенности которых зависят от типа двигателя, вида перемещения выходного звена и их расположения (компоновки).
Преобразователи движения предназначены для преобразования одного вида движения в другое, согласования скоростей и вращающих моментов двигателя и выходного звена. Для преобразования движения используют винтовые, реечные, цепные, тросовые передачи, а также передачи зубчатым ремнем, мальтийские механизмы и др. Так как электродвигатели в основном высокооборотные, а рабочие скорости выходных звеньев мехатронных модулей сравнительно невелики, то для согласования скоростей используют понижающие передачи (редукторы): зубчатые цилиндрические и конические, червячные, планетарные и волновые. Тип преобразователя движения выбирают, исходя из сложности его конструкции, коэффициента полезного действия, люфта в передаче, габаритных размеров и массы, свойств самоторможения, жесткости, удобства компоновки, технологичности, долговечности, стоимости и т. п. Выбор преобразователя движения оказывает существенное влияние на характеристики мехатронного модуля.
Реечные передачи
Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное движение рейки и, наоборот, поступательного движения рейки во вращательное движение шестерни.
Основными звеньями реечной передачи являются шестерня и зубчатая рейка (рис. 2.2).
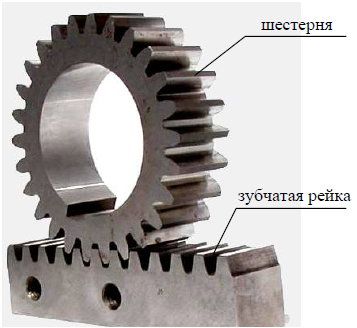
Рис. 2.2. Реечная передача
Шестерня- рейка могут иметь прямозубое или косозубое зацепление.
Сегодня вместо зубчатой рейки применяется зубчатый ремень, соединяющий шестерню с подвижной кареткой, на которой крепится объект позиционирования (рис. 2.3).
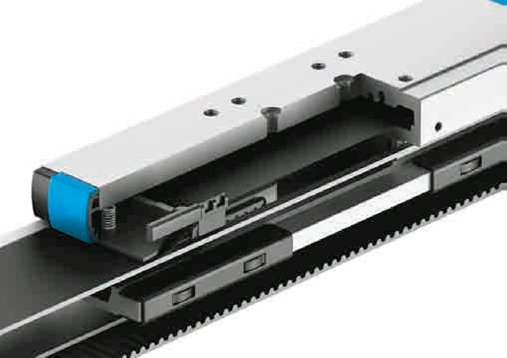
Рис. 2.3. Привод с зубчатым ремнем с шариковой линейной направляющей EGC-TB-KF фирмы Фесто
Конические редукторы
Конические редукторы предназначены для увеличения крутящего момента и передачи под углом 900.
В конических редукторах используются конические, гипоидные или червячные передачи (рис.2.4).
Червячные редукторы отличаются высокой плавностью хода, низким уровнем шума. Присутствующее трение скольжения снижает коэффициент полезного действия, но при этом обеспечивается необратимость механизма (самоблокировка). В многозаходных червячных редукторах обеспечивается обратимость механизма (рис.2.5).
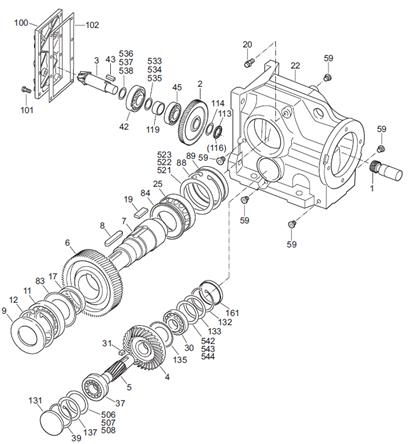
Рис. 2.4. Базовая конструкция конического редуктора фирмы SewEurodrive
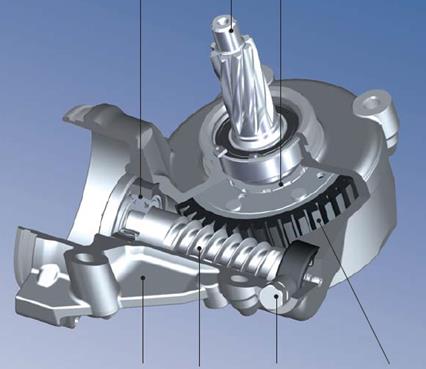
Рис.2.5. Червячный редуктор сервоусилителя рулевого управления
Планетарные передачи
Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как показано на рис. 2.5. Движение этих колес сходно с движением планет и поэтому их называют планетарными или сателлитами.
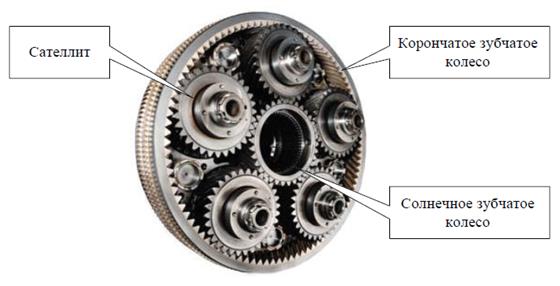
Рис. 2.5. Планетарная передача
Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными зубьями, центрального корончатого зубчатого колеса с внутренними зубьями, сателлитов с внешними зубьями, которые входят в зацепление одновременно с солнечным и корончатым колесами, и водила, на котором расположены оси сателлитов (см. рис. 2.5).
В современных мехатронных модулях планетарные зубчатые передачи находят широкое применение благодаря их компактности и малой массы, реализации больших передаточных отношений, малой нагрузки на опоры, большого коэффициента полезного действия, высокой кинематической точности, жесткости и надежности.
При проектировании планетарных зубчатых передач следует учитывать и их недостатки: конструктивную сложность, повышенные требования к точности изготовления и монтажа, снижение коэффициента полезного действия при увеличении передаточного отношения.
В зависимости от порядка наложения связей на звенья планетарные передачи могут использоваться как для суммирования не скольких вращательных движений
, так и для их разделения между несколькими ведомыми валами.
Волновые зубчатые передачи
Работа волновой передачи основана на принципе преобразования параметров движения вследствие волнового деформирования одного из звеньев механизма. Этот принцип впервые был предложен в 1944 году А.И. Москвитиным для фрикционной передачи с электромагнитным генератором волн, а затем в 1969 г. В. Массером для зубчатой передачи с механическим генератором волн. С точки зрения кинематики она представляет собой планетарную передачу, у которой одно из колес выполнено в виде гибкого венца.
Волновая зубчатая передача состоит из гибкого зубчатого колеса с наружными зубьями, жесткого зубчатого колеса с внутренними зубьями и генератором волн (рис. 2.6).
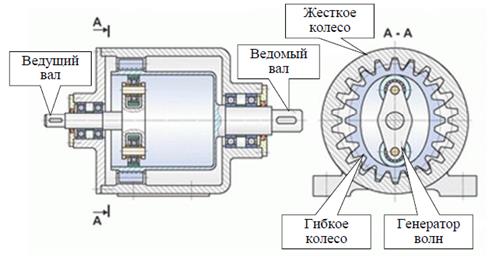
Рис. 2.6. Волновая зубчатая передача
Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора волн при больших диаметрах колес (во избежание высокой окружной скорости генератора), мелкие модули зубьев колес, меньшая крутильная жесткость гибкого колеса сравнительно с обычной зубчатой передачи.
Волновые передачи могут работать в качестве редуктора (КПД 80...90 %) и мультипликатора (КПД 60...70 %). В первом случае ведущим звеном является генератор волн, во втором – вал гибкого или жесткого колеса.
Передача винт-гайка качения
Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного в поступательное движение, и наоборот, поступательного во вращательное движение (при обеспечении отсутствия самоторможения).
Она характеризуется высоким КПД (0,9...0,95), малым коэффициентом трения - качения, небольшим износом, высокой точностью хода, долговечностью, возможностью полного устранения зазоров, высокой чувствительностью к микроперемещениям, возможностью работы без смазки.
Недостатками передачи являются: достаточно сложная технология изготовления, высокая стоимость, пониженное демпфирование и необходимость защиты от пыли.
В винтовых шариковых парах между рабочими винтовыми поверхностями винта и гайки (иногда вкладыша) помещены стальные шарики, как показано на рис. 2.7.
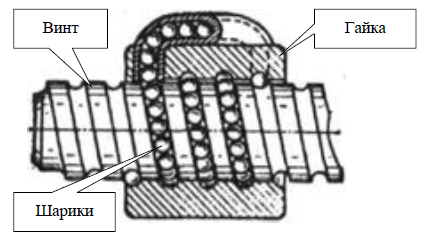
Рис. 2.7. Винтовая шариковая пара
Для обеспечения непрерывной циркуляции шариков концы рабочей части винтовой поверхности соединены возвратным каналом. Возвратный канал может представлять собой отверстие, просверленное в теле гайки и соединяющее начало первого витка с концом последнего витка резьбы (см. рис. 2.8), изогнутую трубку, концы которой вставлены в отверстия гайки, просверленные по касательной к поверхности резьбы, специальный вкладыш, который направляет шарики из впадин одного витка через выступ резьбы винта во впадину соседнего витка. Вкладыш вставляют в окно гайки. В большинстве случаев в гайке применяют 3, 4 или 6 окон, расположенных соответственно под углом 120, 90 или 60 градусов.

Рис. 2.8. Винтовые передачи фирмы THOMSON
Примером реализации винтовой передачи является электроцилиндр (Рис. 2.9).
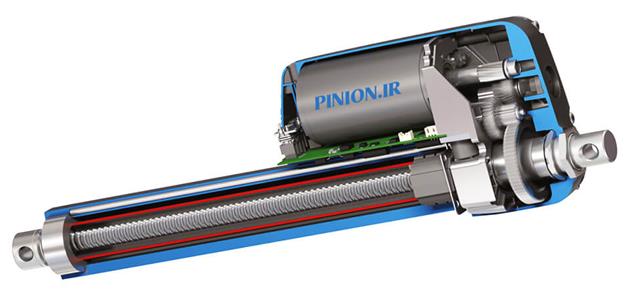
Рис. 2.9. Винтовая передача в электроцилиндре
Контрольные вопросы
1. Схема классификации.
2. Конструктивные особенности реечных передач.
3. Какие основные преимущества шарико-винтовых передач?
4. Приведите примеры мехатронных модулей с шарико-винтовыми передачами.
5. Приведите примеры мехатронных модулей, использующих привод с зубчатым ремнем.
6. для чего предназначены преобразователи давления?