ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 65
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
В зависимости от способа компенсации гидродинамического
давления гидравлические лаги подразделяются на лаги:
-- с механической компенсацией;
-- с электромагнитной компенсацией;
-- с гидравлической компенсацией;
-- без компенсации.
26. Достоинства и недостатки гидродинамических лагов.
К данному вектору присоединяется масса ошибок, таких как качка, снос, дифферент и обрастание. Поэтому такие лаги чаще всего показывают ошибочные данные, но при этом довольно просты в изготовлении. Так что являются самыми бюджетными и часто используемыми на судах не поднадзорных сертификационным обществам.
- диафрагма частенько изнашивается и требует установки компенсационного устройства
27. Принцип работы доплеровских гидроакустических лагов.
В данной системе в качестве отражающей поверхности выступает грунт (для режима абсолютного лага) или слой воды (для режима относительного лага).
В днище судна установлена антенна, действующая как излучатель и приемник ультразвуковых колебаний. В сторону дна излучаются ультразвуковые волны в виде узкого пучка под углом к плоскости горизонта.
При использовании доплеровского гидроакустического лага и излучатель, и приемник колебаний находятся на судне.
28. Антенные системы доплеровских гидроакустических лагов.
Двухлучевые и многолучевые доплеровские лаги.
Эффективным способом устранения нелинейной зависимости между сдвигом частоты и скоростью судна является использование двухлучевой антенной системы.
По этой схеме акустические сигналы излучаются вдоль диаметральной плоскости судна в сторону носа и кормы под одним и тем же углом
Для определения не только продольной, но и поперечной составляющей скорости судна применяют трех-, четырех- или даже шестилучевые доплеровские системы Шестилучевые доплеровские системы, устанавливаемые на крупнотоннажных судах, предназначены не только для навигационных целей, но и для измерения небольших по значению поперечных составляющих скорости носовой и кормовой оконечностей судна, что важно при выполнении швартовных операций.
29. Достоинства и недостатки доплеровских гидроакустических лагов.
Практическая реализация однолучевого доплеровского лага связана с рядом трудностей, основными из которых являются нелинейность зависимости от изменение угла при крене, дифференте и на качке.
Погрешность, вызванная изменением скорости звука в морской воде, может достигать 4 %, поэтому в большинстве конструкций лагов приняты меры по компенсации или учету погрешности.
Глубина – 200-300 метров
30. Индукционные лаги. Принцип действия индукционных лагов.
Индукционным он называется потому, что его принцип действия основан на законе электромагнитной индукции Фарадея, а электронным - в связи с тем, что его схема собрана из транзисторов, тиристоров и других элементов электроники.
В индукционных лагах источником магнитного поля является специальный электромагнит, роль проводника выполняет морская вода.
Электромагнит и измерительные электроды размещаются в устройстве, называемом индукционным первичным преобразователем скорости (ИППС), жестко связанным с корпусом корабля.
ИППС устанавливается под днищем корабля таким образом, чтобы магнитное поле, создаваемое электромагнитом охватывало некоторый объем встречного потока воды при движении корабля.
Измерив напряжение, возникающее на измерительных электродах от наводимой в воде ЭДС, можно определить скорость перемещения источника магнитного поля относительно воды, т.е. определить относительную скорость корабля.
31. Достоинства и недостатки индукционных лагов.
Отпадает необходимость размещать некоторые приборы ниже ватерлинии, появляется возможность определять скорость судна на заднем ходу, повышается надежность системы за счет исключения механических и электромеханических устройств и т. д.
Индукционным лагом ИЭЛ-2- можно измерять относительную скорость судна до 30 уз. и пройденное расстояние.
Недостатками известных лагов являются низкая точность измерения скорости из-за возникающей на электродах паразит ной трансформаторной помехи, ЭДС которой по величине превышает полезный сигнал, и низкая надежность преобразователей.
32. ТТХ индукционного электронного лага «ИЭЛ – 2М».
Технические данные
– лаг измеряет скорость вперед от 0 до 30 узлов, скорость назад лаг не измеряет;
– инструментальная погрешность 0,2 узла;
– в помещении, где установлены приборы лага, допускается перепад температуры от – 10° до + 50° С; инструментальная погрешность при этом может изменяться в пределах 0,35 узла;
– питание лага осуществляется однофазным током частотой 50 Гц, напряжением 220 В;
– потребляемая мощность составляет 150-200 Вт в зависимости от количества потребителей;
– ресурс лага равен 50 000 часов.
33. Состав комплекта индукционного электронного лага «ИЭЛ – 2М».
Лаг может устанавливаться на любых судах с неограниченным районом плавания.
В качестве чувствительного элемента используется индукционный первичный преобразователь сигнала (ИППС). Часто его называют просто «индукционный преобразователь»
(ИП) – прибор 9.
Прибор 6 – центральный прибор; предназначен для выработки относительной скорости судна и пройденного им расстояния.
Прибор 3 – прибор питания.
Прибор 29 – согласующий прибор; предназначен для предварительного усиления сигнала чувствительного элемента и согласования выходного сигнала ИП и входного сопротивления прибора 6.
Прибор 59 – трансляционный прибор; предназначен для трансляции информации о скорости в цифровом виде.
Прибор 119 – предназначен для преобразования информации о скорости в аналоговый вид и трансляции ее потребителям.
Прибор 1 – цифровой индикатор скорости.
Прибор 5 – содержит цифровой индикатор скорости и механический счетчик пройденного расстояния.
34. Автоматическое управление судном. Общие понятия о автоматическом управлении.
Все суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ) курсом судна. Основным элементом САУ является прибор управления (авторулевой).
Авторулевой - прибор, предназначенный для автоматического управления судовым рулевым приводом и, следовательно, автоматически, без участия рулевого матроса, удерживающий судно на заданном курсе. Авторулевой также производит повороты и изменения курса на заданную величину.
При правильной настройке авторулевой обеспечивает снижение потерь ходового времени до 3 % за счёт более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля. Углы перекладки руля при автоматическом управлении на 20 - 30 % меньше, чем при ручном.
Автоматический рулевой работает от основного прибора гирокомпаса.
35. Авторулевой «Печора», составные элементы.
Пульт управления.
Пульт управления (ПУ) является основным прибором авторулевого, с которого осуществляются все виды дистанционного управления рулём.
Станция электроэлементов
Станция электроэлементов (СЭ) предназначена для размещения в ней электроэлементов и для удобства разводки кабельных трасс.
Рулевой датчик
Рулевой датчик (РД) предназначен для выработки сигнала обратной связи от истинного положения руля для электрической схемы авторулевого и для рулевых указателей.
Исполнительные механизмы
Исполнительные механизмы (ИМ) входят в комплект авторулевых предназначенных для установки на судах с электрогидравлическими рулевыми машинами.
36. Авторулевой «Печора», принцип действия.
Авторулевой «ПЕЧОРА» предназначен для стабилизации движения судна на заданном курсе и для плавного изменения курса судна с заданной угловой скоростью поворота.
Авторулевой может производить повороты и изменения курса корабля на заданную ему величину. Как только от датчика авторулевого поступает сигнал, рулевой привод перекладывает руль на заданный угол в сторону, которая противоположна уходу корабля с курса. Как только начинает возвращаться на прежний курс, авторулевой отводит руль, а потом, удерживая его, перекладывает руль в сторону, противоположную прежней стороне.
37. Авторулевой «Печора», режимы работы.
В авторулевых «Печора» предусмотрены следующие режимы управления:
-- автоматический – удержание судна на заданном курсе
-- циркуляция – изменение курса судна с заданной угловой скоростью
-- следящий – обеспечивающий перекладку руля на угол, пропорциональный углу отклонения рукоятки управления
-- простой
38. Основы эхолокации. Виды эхолотов и принципы их работы.
Эхолот «Кубань»
Навигационный эхолот «Кубань» устанавливается на судах речного флота и предназначен для измерения глубин и записи профиля дна водных бассейнов под днищем судна и под днищем толкаемых составов.
Работа эхолота основана на измерении времени прохождения ультразвуковых колебаний в воде от вибратора-излучателя до дна и обратно к вибратору-приемнику. Скорость распространения звука в воде принимается равной 1450 м/сек.
Навигационный эхолот НЭЛ- М2 предназначен для измерения индикации и регистрации глубин.
39. Комплектация и предназначение блоков эхолота.
В состав эхолота входят:
- самописец – прибор 4;
- указатель – прибор 4А;
- вибратор-излучатель – прибор 1;
- вибратор-приёмник – прибор 1;
- цифровое табло цифрового указателя глубин (ЦУГ) – прибор 11;
- две кабельные коробки – приборы 13;
- стойка с электронными блоками – прибор 16;
- электронная часть ЦУГ – прибор 16А.
Самописец – предназначен для автоматической записи глубины и управления посылкой ультразвуковых импульсов.
Указатель – служит для визуального отсчета измеряемых глубин и так же, как самописец, управляет посылками ультразвуковых импульсов
Усилитель – предназначен для усиления электрических импульсов, возникающих в обмотке вибратора – приемника в результате колебаний его никелевого пакета под воздействием эхо-сигналов.
Прибор 11.
Представляет собой цифровое табло и служит для индикации измеренной глубины.
Прибор 13
Представляет собой кабельную коробку, предназначенную для соединения прибора вибраторов с электронными блоками.
Прибор 16
Предназначен для размещения электронных блоков и связи приборов эхолота между собой
Прибор 16А
Предназначен для размещения электронных блоков цифрового указателя глубин.
40. Работа эхолота, согласно функциональной схемы.
Эхолоты имеют следующие основные части:
-
Вибратор (антенна). Преобразует электрический сигнал в зондирующий импульс (обычно частота импульса 18-25 кГц) и принимает отраженный от грунта сигнал. Может быть установлено два вибратора. В этом случае один вибратор будет являться передающим, а другой приемным; -
Блок питания. Вырабатывает напряжения, необходимые для работы эхолота. -
Электронная часть. Формирует зондирующий импульс, измеряет время от момента посылки до прихода эхо-сигнала, преобразует время в расстояние, координирует работу всех блоков; -
Индикатор. Служит для отображения информации о скорости в удобном для считывания виде; -
Самописец. Прибор для регистрации глубин на бумаге или дисплее; -
Сигнализатор глубины. Прибор, подающий звуковой сигнал при выходе на глубину меньше или больше установленной (в зависимости от режима).
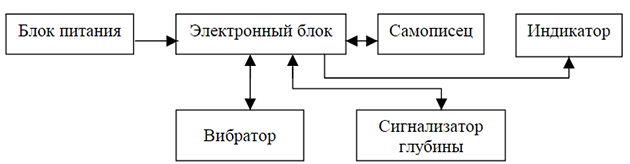
Конструктивно вышеперечисленные блоки могут быть выполнены как в виде отдельных блоков, так и объединены в многофункциональные блоки.
Рис.1 Блок-схема судового эхолота