Файл: Занятие в структуре учебной дисциплины Образовательная робототехника.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.12.2023
Просмотров: 21
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Московский педагогический государственный университет»
Институт физики, технологии и информационных систем
Занятие в структуре учебной дисциплины
«Образовательная робототехника»
Экзаменационная работа по дисциплине
«Педагогика высшей школы»
Работу выполнил аспирант 1-ого курса
Гришанов Павел Александрович
Направление подготовки: 44.06.01 Образование и педагогические науки
Направленность: Теория и методика обучения и воспитания (естествознание)
Преподаватель: д.п.н., доц. Прояненкова Л.А.
Москва – 2022
Оглавление
Разработанное практическое занятие входит в раздел «Интерфейс среды программирования. Разработка и отладка запрограммированных моделей» и представляет собой 2 часа практических занятий включающих самостоятельную работу студентов со средой программирования MIT AppInventor и выполнение кейс-задания.
Целью изучения дисциплины «Основы робототехники» является знакомство с основными понятиями робототехники, освоение принципов проектирования, конструирования и управления робототехническими системами, формирование современных представлений и навыков в области образовательной робототехники с использованием робототехнических комплексов. Ниже приведен фрагмент рабочей программы, реализуемый в методической разработке.
Фрагмент рабочей программы
| № п/п | Наименование темы (раздела) дисциплины (модуля) | Вид самостоятельной работы |
| 3 | Физические принципы работы основных механизмов, датчиков. Проектирование и конструирование основных моделей. | Работа с Интернет-ресурсами, проектирование робототехнических устройств |
| 4 | Интерфейс среды программирования. Разработка и отладка запрограммированных моделей. | Работа с Интернет-ресурсами, анализ и работа с интерфейсом, программирование |
Планируемое занятие основано на использовании платформ LEGO MINDSTORMS Education EV3 и MIT AppInventor и направлено на закрепление практических навыков работы с робототехническими комплектами и средами программирования приложений для мобильных устройств.
С моей точки зрения можно повысить уровень практических умений студентов, если 1) добавить практическое занятие по знакомство со средой визуальной разработки android-приложений в учебную дисциплину «Образовательная робототехника» 2) «разбавить» практические занятия выполнением кейс-заданий.
В данной работе предлагаются следующие дидактические и методические материалы: 1) сценарий урока по теме «Удаленное управление роботом Mindstorms NXT/EV3» 2) Кейс-задача «Безопасный дом»; 3) информационные ресурсы, обеспечивающие поддержку образовательного процесса. Данные практические занятия направлены на развитие у студентов компетенций в процессе формирования представления об основных тенденциях в образовательной робототехнике, использовании возможностей робототехники как ведущего средства формирования базовых представлений в сфере инженерной культуры.
Оценочные средства для проведения текущей аттестации
| № п/п | Наименование темы (раздела) дисциплины (модуля) | Средства текущего контроля | Перечень компетенций |
| 1 | Введение в робототехнику. | Проект Lego Wedo 1.0 | ОК-3,ОК-4, ПК-4 |
| 2 | История развития робототехники. | Практические задания | ОК-3,ОК-4, ПК-4 |
| 3 | Физические принципы работы основных механизмов, датчиков. Проектирование и конструирование основных моделей. | Интерактивные задания, с использованием проектов | ОК-3,ОК-4, ПК-4 |
| 4 | Интерфейс среды программирования. Разработка и отладка запрограммированных моделей. | Проект Lego EV3 | ОК-3,ОК-4, ПК-4 |
В рабочей программе дисциплины «Основы робототехники» в качестве оценочных средств текущего контроля предусмотрена промежуточная аттестация в виде зачета. Форма итогового контроля обучающихся – защита творческих проектов.
Дисциплина «Образовательная робототехника» относится к дисциплинам вариативной части Б1 ОПОП ВО, имеет код: Б1.В.ДВ.17 общепрофессионального цикла. Дисциплина изучается в 8 семестре.
В результате освоения дисциплины студенты должны:
знать: о целях и задачах образования в области робототехники; современные разработки по робототехнике в области образования; комплексом базовых технологий, применяемых при создании роботов; основы программирования; понятия П-регулятора и ПД-регулятора.
уметь: свободно владеть технической терминологией; организовать на основе современных разработок по робототехнике активную внеурочную деятельность учащихся; решать ряд кибернетических задач, результатом которых будут работающие механизмы или роботы с автономным управлением; составлять технические задания.
владеть: методикой реализация межпредметных связей с физикой, информатикой и математикой; методикой развития у школьников инженерного мышления, навыков конструирования, программирования и эффективного использования кибернетических систем, методикой развития мелкой моторики, внимательности, аккуратности и изобретательности, методикой развития креативного мышления и пространственного воображения учащихся.
Опираясь на планируемые результаты обучения и личный опыт, был разработан план практического занятия, а также кейс-задача, которую можно использовать как проверку и отработку полученных навыков в ходе освоения дисциплины.
Для осуществления образовательного процесса по дисциплине необходима следующая материально-техническая база:
-
компьютерный класс, подключенный к сети интернет, оснащенный экраном и мультимедийным проектором; -
наборы «LEGO WEDO 1.0», «LEGO MINDSTORMS EV3» и т.п.
Самостоятельная работа студентов должна способствовать:
-
Закреплению полученных теоретических знаний и практических умений -
Углубленному изучению теоретических материалов -
Развитию познавательных способностей, творческой инициативы, ответственности и организованности -
Формированию способностей к саморазвитию и самореализации -
Развитию исследовательских умений
Перед выполнением самостоятельной аудиторной работы необходимо провести инструктаж по выполнению заданий.
Приложение 1
Сценарий практического занятия.
Направление подготовки - педагогическое образование
Уровень образования - бакалавр
Дисциплина – «Образовательная робототехника»
Курс - 4
Тема занятия “ Удаленное управление роботом Mindstorms NXT/EV3”
Цель занятия: познакомить студентов с особенностями сборки и дистанционным управлением роботом Mindstorms NXT/EV3 с мобильного телефона/планшета/ноутбука, организация практической работы бакалавров в малых группах по сборке робота с ДУ.
Планируемые образовательные результаты
Знание:
-
Основных этапов развития робототехники -
Особенностей механической составляющей конструкций мобильных роботов -
Назначения и принципов работы центрального управляющего блока и электромеханических приводов -
Методических особенностей преподавания робототехники для школьников
Умение:
-
Осуществлять сборку конструкций мобильных роботов по заданным функциональным требованиям -
Устанавливать необходимое программное обеспечение для программирования мобильных роботов -
Составлять алгоритмы и реализовывать на их основе программы в средах программирования -
Осуществлять оптимизацию созданных конструкций, алгоритмов и программ.
Дисциплина направлена на формирование следующих профессиональных компетенций:
-
способность использовать естественнонаучные и математические знания для ориентирования в современном информационном пространстве (ОК-3); -
способность к коммуникации в устной и письменной формах на русском и иностранном языках для решения задач межличностного и межкультурного взаимодействия (ОК-4); -
способность использовать возможности образовательной среды для достижения личностных, метапредметных и предметных результатов обучения и обеспечения качества учебно-воспитательного процесса средствами преподаваемых учебных предметов (ПК-4); -
способность использовать современные методы и технологии обучения и диагностики (ПК-2); -
готовность к взаимодействию с участниками образовательного процесса (ПК-6).
Методическое оснащение занятия:
Необходимое оборудование и материалы: комплект LEGO Mindstorms NXT/EV3, Инструкции по работе с комплектом LEGO Mindstorms NXT/EV3, Схема сборки исследователя, ТСО: персональный компьютер, мультимедийный проектор.
Формы организации познавательной деятельности обучающихся: рассказ, беседа с использованием проблемных и эвристических вопросов, обучение через деятельность, демонстрация.
Методы обучения: иллюстративно-объяснительный; проблемный; репродуктивный; проблемное изложение;
Формы работы: групповая, индивидуальная
Педагогические технологии: ИК- технология, проблемного и коллективного взаимообучения, технология сотрудничества.
План занятия
| № | Этапы занятия | Организация действий | t, мин |
| 1 | Организационный этап | Преподаватель разъясняет форму организации занятия (практическая работа – управление роботом) и предъявляет критерии оценки. | 2 |
| 2 | Актуализация знаний | Для начала необходимо собрать робота из деталей набора MindstormsEV3. Если ваш робот отличается от приведенного ниже, не волнуйтесь, главное чтобы в сборке присутствовало два мотора находящихся на противоположных сторонах и подсоединенных к портам B и C. Поведение робота можно будет легко регулировать с помощью двух двигателей, так для движения вперед и назад они будут работать синхронно, а для поворота один из двигателей будет работать с меньшей скоростью и робот повернет | 10 |
| 3 | Объяснение новой темы | Для того чтобы начать создание проекта, необходимо зайти на сайт MIT AppInventor и зарегистрироваться на нем. Для регистрации необходимо иметь почту в google. После регистрации вам будет доступно создание нового проекта. Студенты задают уточняющие вопросы. | 15 |
| 4 | Применение знаний и формирование практических умений и навыков | Для начала необходимо выбрать компоненты с левой стороны экрана и разместить их на Screen1. Из объектов нам понадобится ListPicker1 для подключения устройств доступных по Bluetooth, в нашем случае робота EV3. Button_Disconnect нужен будет для отключения от устройства. Пять кнопок (Button) будут отвечать за движение роботом: вперед, назад, направо, налево и остановка. Slider1 будет отвечать за регулировку мощности двигателей (0%-100%). Сначала мы используем переменную (мощность) для представления мощности двигателя с начальным значением 100. Мы установим ее значение в событии Slider.positionChanged для дальнейшего управления мощностью двигателя. В событии ListPickerConnect.BeforePicking мы должны установить для его элемента значение BluetoothClient1.AddressAndNames. После этого мы можем подключить (BluetoothClient1.Connect) наш сопряженный EV3 в событии ListPickerConnect.AfterPicking. Если соединение установлено успешно, Listpicker будет установлен на невозможность, но другая кнопка будет включена для пользователя, чтобы работать. За исключением кнопки «Стоп», остальные четыре кнопки будут вызывать команду Ev3Motors1.RotateSyncInDuration при нажатии, с другим значением TurnRatio и мощностью. Возьмем, например, Button_Forward, у нас есть следующие параметры: переменная мощности, 2000 (мс), 0 (означает два двигателя с одинаковой скоростью и true (обрыв при завершении выполнения). Обратите внимание, что каждый раз, когда вы нажимаете кнопку, робот будет что-то делать в течении 2 секунд, вы можете изменить поле в миллисекундах или изменить команду RotateSyncIndefinately. Это позволит вашему роботу быть более плавным. 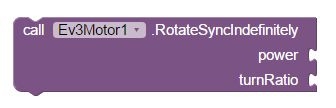 Рис. 4. Что касается Button_Backward (кнопка движения назад), мы просто умножаем переменную мощность на -1, чтобы двигатели вращались в противоположном направлении (одинаковая мощность). Ваш робот будет двигаться назад. 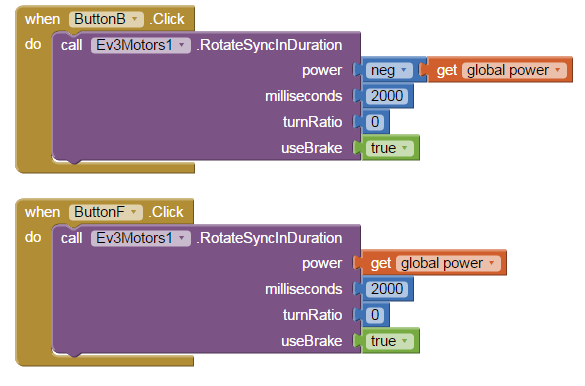 Рисунок 5 - Блоки для движения вперед и назад Влево, вправо повернуть и остановить: Button_Left и Button_Right - почти та же идея, но на этот раз мы устанавливаем значение TurnRatio равным -200 (поворот влево) и 200 (поворот вправо). Вы можете установить turnRatio на более высокое значение (максимум 100), чтобы сделать более крутой поворот. Наконец, нажмите Button_Stop, чтобы остановить робота, вы можете использовать команду RatateSync с 0 мощностью для достижения того же эффекта. | 15 |
| 5 | Практическая работа студентов | Сначала вы должны выполнить сопряжение со своим роботом EV3, затем нажать кнопку питания и убедиться, что BT EV3 включен. Нажмите кнопку выбора списка [Выберите свой EV3] и выберите имя сопряженного EV3, после чего все кнопки управления будут доступны для нажатия. Пожалуйста, нажмите каждую кнопку, чтобы увидеть, как движется робот, а также перетащите ползунок, чтобы настроить мощность двигателя. Подключите свой EV3. Приложение запускается, как показано на рисунке 12, пожалуйста, нажмите Connectlistpicker и выберите свой EV3. Нажмите и подключите успешно, вы можете нажать пять кнопок в центре приложения, чтобы управлять своим роботом. Наслаждайтесь управлением. Нажмите кнопку «Отключить», чтобы закрыть соединение Bluetooth с EV3. | 30 |
| 6 | Рефлексия | Преподаватель беседует со студентами на предмет оценки собственной деятельности и деятельности однокурсников, а также остаточных знаний, полученных в ходе занятия (что мы узнали, чему научились, какие плюсы вы выявили при данной организации работы). Преподаватель отмечает положительные моменты выступления студентов и недостатки, выявленные в ходе выступлений. | 20 |
| 7 | Формулирование ДЗ | Преподаватель озвучивает и разъясняет домашнее задание. Создать приложение для отображения показаний датчиков из набора Lego Mindstorms EV3 созданное в среде MIT AppInventor. | 2 |