Файл: Автоматического управления, система автоматического регулирования, передаточные функции, устойчивость системы, коррекция системы.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.12.2023
Просмотров: 49
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Аннотация
Курсовой проект объем работы с 32, 29 рис , 4 табл , 7 источников. ГЕНЕРАТОР, ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА, АМПЛИТУДО-ЧАСТОТНАЯ ХАРАКТЕРИСТИКА, СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, ПЕРЕДАТОЧНЫЕ ФУНКЦИИ, УСТОЙЧИВОСТЬ СИСТЕМЫ, КОРРЕКЦИЯ СИСТЕМЫ
Объектом исследования являются принципиальная схема САУ электродвигателя постоянного тока
Цель работы: рассчитать статическую систему стабилизации скорости электродвигателя постоянного тока
Результатом исследования является получение системы стабилизации скорости вращения электродвигателя постоянного тока с необходимыми параметрами По полученным в результате расчета параметрам можно собрать систему стабилизации скорости вращения электродвигателя постоянного тока с максимально приближенными к расчетным характеристикам Система будет обладать заданной степенью колебательности, заданными запасом по модулю и по фазе и наименьшей возможной статической ошибкой
Первым этапом расчетной части работы является составление дифференциальных уравнений и передаточных функций, входящих в систему звеньев Вторым этапом является проверка системы на устойчивость по 4 критериям Третьим этапом является коррекция системы Четвертым этапом является моделирование полученной системы с учетом корректирующего устройства
Содержание
| | Введение | 6 |
| 1. | Задание на курсовой проект | 7 |
| 2. | Краткое описание принципа действия системы | 9 |
| 3. | Разбиение системы на элементы | 10 |
| 4. | Построение структурной схемы САУ | 11 |
| 5. | Передаточные функции системы | 13 |
| 6. | Проверка системы на устойчивость | 14 |
| 7. | Коррекция устойчивости системы | 21 |
| 8. | Реализация моделирования САУ в программе SamSim | 28 |
| | Заключение | 29 |
| | Список используемой литературы | 30 |
Нормативные ссылки
В курсовом проекте использованы ссылки на следующие стандарты (нормативные документы):
ГОСТ 2.102 – 2013 ЕСКД. Виды и комплектность конструкторских документов;
ГОСТ 2.104 - 2006 ЕСКД. Основные надписи;
ГОСТ 2.105 - 2011 ЕСКД. Общие требования к текстовым документам;
ГОСТ 2.106 – 2005 ЕСКД. Текстовые документы;
ГОСТ 2.109 – 2007 ЕСКД. Основные требования к чертежам;
ГОСТ 2.111 – 2013 ЕСКД. Нормоконтроль;
ГОСТ 2316 – 2008 ЕСКД. Правила нанесения на чертежах надписей, технических требований и таблиц.
Сокращения и обозначения
САУ – система автоматического управления;
САР - системы автоматического регулирования;
ОУ – обмотка управления;
ОВД – обмотка возбуждения двигателя;
К1 - коэффициент усиления промежуточного усилителя ПУ;
К2, К3, К4, К5 - коэффициенты передачи других звеньев систем;
ТY, TK, TЭ-постоянные времени электромашинного усилителя;
Тя, Тм - постоянные времени двигателя;
Iя,Ω - ток якоря и скорость двигателя;
Мд, Мс - электромагнитный момент двигателя и момент статический
(сопротивления движению);
е = U3-Uос - сигнал ошибки (отклонение) в системах.
U3- задающее напряжение;
Uос- напряжение обратной связи;
Uy- напряжение усилителя;
ПУ - промежуточный усилитель;
Д - двигатель;
ЭМУ - электромашинный усилитель
Введение
Теория автоматического управления (ТАУ) — научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических системах управления. ТАУ выявляет общие закономерности функционирования, присущие автоматическим системам различной физической природы, и на основе этих закономерностей разрабатывает принципы построения высококачественных систем управления.
При изучении процессов управления в ТАУ абстрагируются от физических и конструктивных особенностей систем и вместо реальных систем рассматривают их адекватные математические модели, поэтому основным методом исследования в ТАУ является математическое моделирование. Кроме того, методологическую основу ТАУ образуют теория обыкновенных дифференциальных уравнений, операционное исчисление (преобразование Лапласа), гармонический анализ (преобразование Фурье).
ТАУ вместе с теорией функционирования элементов систем управления (датчиков, регуляторов, исполнительных механизмов) образует более широкую отрасль науки — автоматику. Автоматика в свою очередь является одним из разделов технической кибернетики.
Первые теоретические работы в области автоматического управления появились в конце XIX в., когда в промышленности получили широкое распространение регуляторы паровых машин, и инженеры-практики стали сталкиваться с трудностями при проектировании и наладке этих регуляторов. Именно в этот период крупный русский ученый и инженер И.А. Вышнеградский выполнил ряд научных исследований, в которых впервые паровая машина и ее регулятор были проанализированы математическими методами как единая динамическая система.
В дальнейшем выдающиеся русские ученые А.М. Ляпунов и Н.Е. Жуковский создали основы математической теории процессов, протекающих в автоматически управляемых машинах и механизмах.
Задание на курсовой проект
1 Задание на курсовой проект
Исходными данными при выполнении курсового проекта являются принципиальная схема статической системы стабилизации скорости электродвигателя постоянного тока в исходном варианте (без коррекции), параметры неизменяемой части и технические требования, которым должна удовлетворять спроектированная система
К техническим требованиям при выполнении курсовой работы относятся показатели качества, основными из которых являются время регулирования и максимальное перерегулирование при отработке управляющих воздействий
На рис изображена принципиальная схема САУ
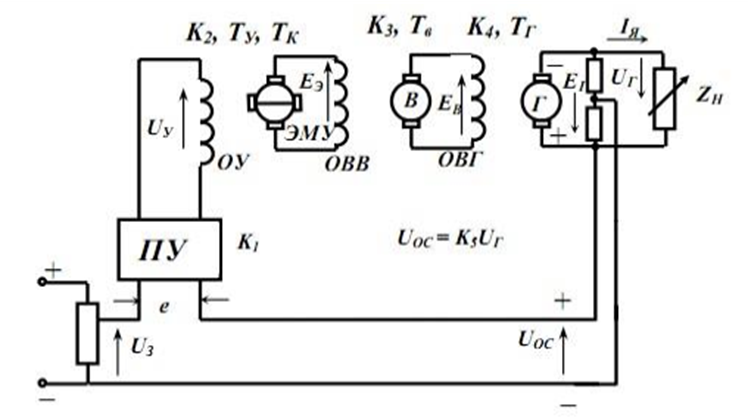
Рисунок 1.1 – Принципиальная схема САУ
В таблице 1.1 представлены исходные данные для САУ. В таблице 1.2 представлены требования задания курсового проекта.
Таблица 1.1 – Данные элементов системы автоматического регулирования
| Вариант | K1 | K2 | K3 | K4 | K5 | TY, с | TK, с | TB, c | TГ, с |
| 67 | 10 | 3 | 2,5 | 5 | 0,52 | 0,018 | 0,15 | 0,24 | 0,62 |
Таблица 1.2 – Требования задания курсового проекта
| tрег, с | σm,% | Д-разбиение | Тип коррекции |
| 0,72 | 5 | по К1 | Параллельная |
Для выполнения работы необходимо:
1. Дать краткое описание работы САУ.
2. Разбить систему на элементы (звенья) и составить передаточные функции для каждого звена.
3. Построить структурную схему САУ.
4. Вывести выражения для передаточных функций системы в разомкнутом и замкнутом состояниях по управляющему и возмущающему воздействиям.
5. Проверить исходную систему на устойчивость по критериям.
6. Рассчитать параметры корректирующего звена.
7. Смоделировать скорректированную систему.
2 Краткое описание принципа действия системы
С помощью потенциометра на входе системы задаем напряжение U3, которое в начальный момент времени подается на ОВВ. Основным способом возбуждения синхронных машин является электромагнитное возбуждение. Для питания обмотки возбуждения Г в данной схеме применяется специальный генератор постоянного тока, называемый возбудителем В, обмотка возбуждения которого ОВВ получает питание постоянного тока от другого звена ЭМУ. При прохождении по обмотке ОВГ постоянного тока возникает ЭДС возбуждения, которая наводит в магнитной системе машины магнитное поле. Генератор вырабатывает напряжение Uг. На выходе системы стоит делитель напряжения. Часть напряжения Uг, снятое с делителя напряжения по каналу ОС, поступает на вход ПУ, поступает уже ошибка «е», которая автоматически меняется при изменении Uг. Если Uг повысилось, то «е» уменьшается и, следовательно, уменьшается ток в ОВГ и напряжение Uг уменьшается до нужной величины. Обратный процесс происходит при уменьшении Uг. Таким образом происходит автоматическое регулирование.
3 Разбиение системы на элементы
1) ПУ − промежуточный усилитель. Предназначен для усиления мощности сигнала задающего генератора и получения кривой переменного тока прямоугольной формы.
Передаточная функция ПУ:
 | (3.1) |
Промежуточный усилитель является пропорциональным звеном.
2) ЭМУ – электромашинный усилитель, предназначенный для усиления мощности подаваемого на обмотку возбуждения сигнала за счет механической энергии первичного двигателя. ЭМУ используется для того, чтобы сигналом малой мощности контролировать сигнал большой мощности.
Передаточная функция ЭМУ:
 | (3.2) |
ЭМУ является апериодическим звеном 1-го порядка
3) В – возбуждение генератора – создает рабочее магнитное поле, благодаря которому в вращающемся якоре создается ЭДС:
 | (3.3) |
Двигатель является апериодическим звеном 2-го порядка
4) Генератор-объект регулирования устройства, преобразующий механическую энергию, получаемую от двигателя в электрическую.
 | (3.4) |
Генератор является апериодическим звеном 1-го порядка
5) ОС-обратная связь
 | (3.5) |
Обратная связь является пропорциональным звеном.
4 Построение структурной схемы САУ
Структурная схема системы автоматического регулирования строится на основе функциональной схемы, которая для данной системы стабилизации скорости вращения вала состоит из последовательно соединенных ПУ, ЭМУ, генератора, двигателя и тахогенератора. Последнее устройство выполняет функции обратной связи. На рисунке 4.1. изображена структурная схема для данной САУ.

Рисунок 4.1 - Структурная схема САУ
Для данной схемы:
 | (4.1) |
 | (4.2) |
 | (4.3) |
 | (4.4) |
 | (4.5) |