Файл: Автоматического управления, система автоматического регулирования, передаточные функции, устойчивость системы, коррекция системы.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.12.2023
Просмотров: 50
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рисунок 7.6 – Программный код для расчета частоты среза
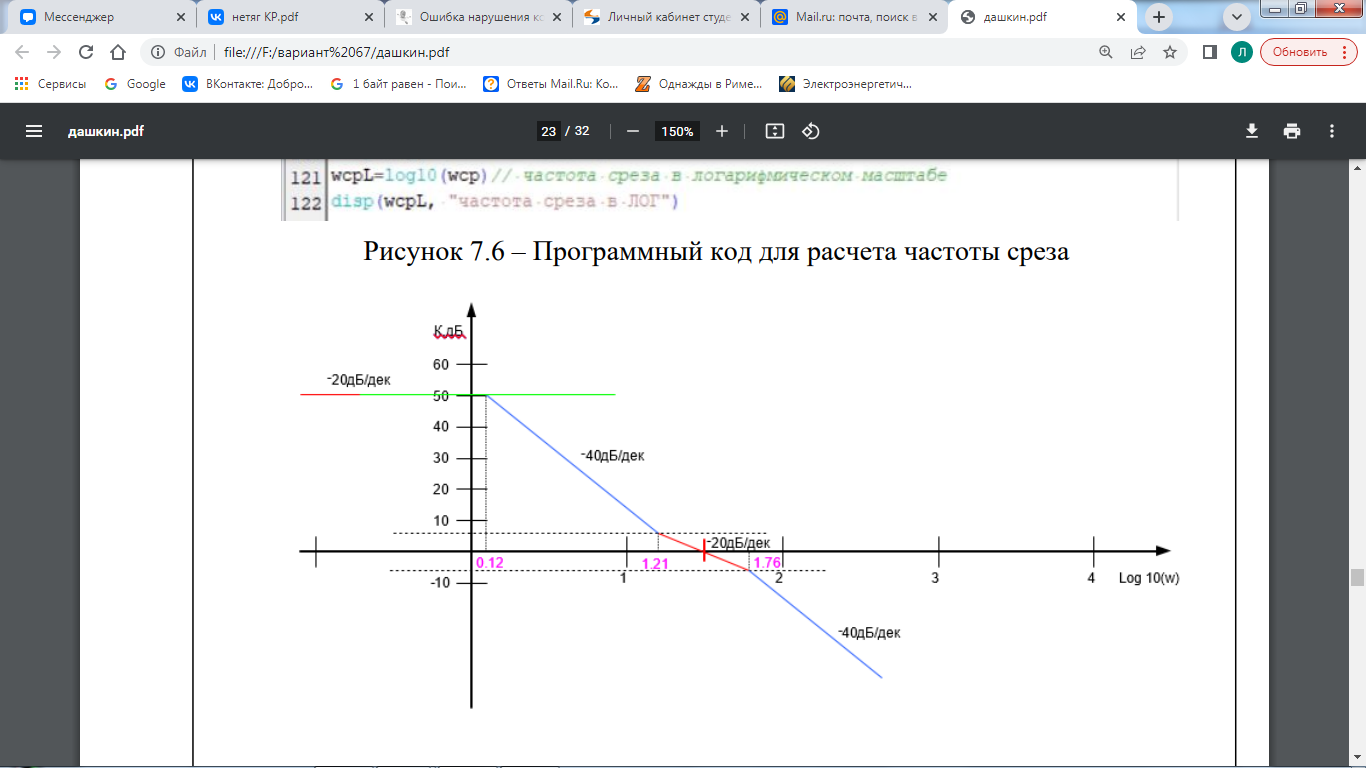
Рисунок 7.7 – Желаемая ЛАЧХ
Полученная ЛАЧХ присуща астатическим САУ с астатизмом 1-го порядка.
Исходя из полученных графиков определим постоянные времени системы
 | (7.1) |
Т1 = 1,3182567 с; Т2 = 0,1096478 с; Т3 = 0,0380189 с.
На рисунке 7.8 представлен используемый для этого расчета программный код.
Рисунок 7.8 – Программный код для расчета постоянных времени
Для астатической системы САУ с астатизмом 1-го порядка общий вид передаточной функции выглядит следующим образом:
 | (7.2) |
Запишем и рассчитаем передаточные функции для звеньев откорректированной системы. Затем найдем передаточную функцию всей системы. На рисунке 7.9 представлен необходимый для этого программный код.
 | (7.3) |
 | (7.4) |
 | (7.5) |
 | (7.6) |
  | (7.7) |
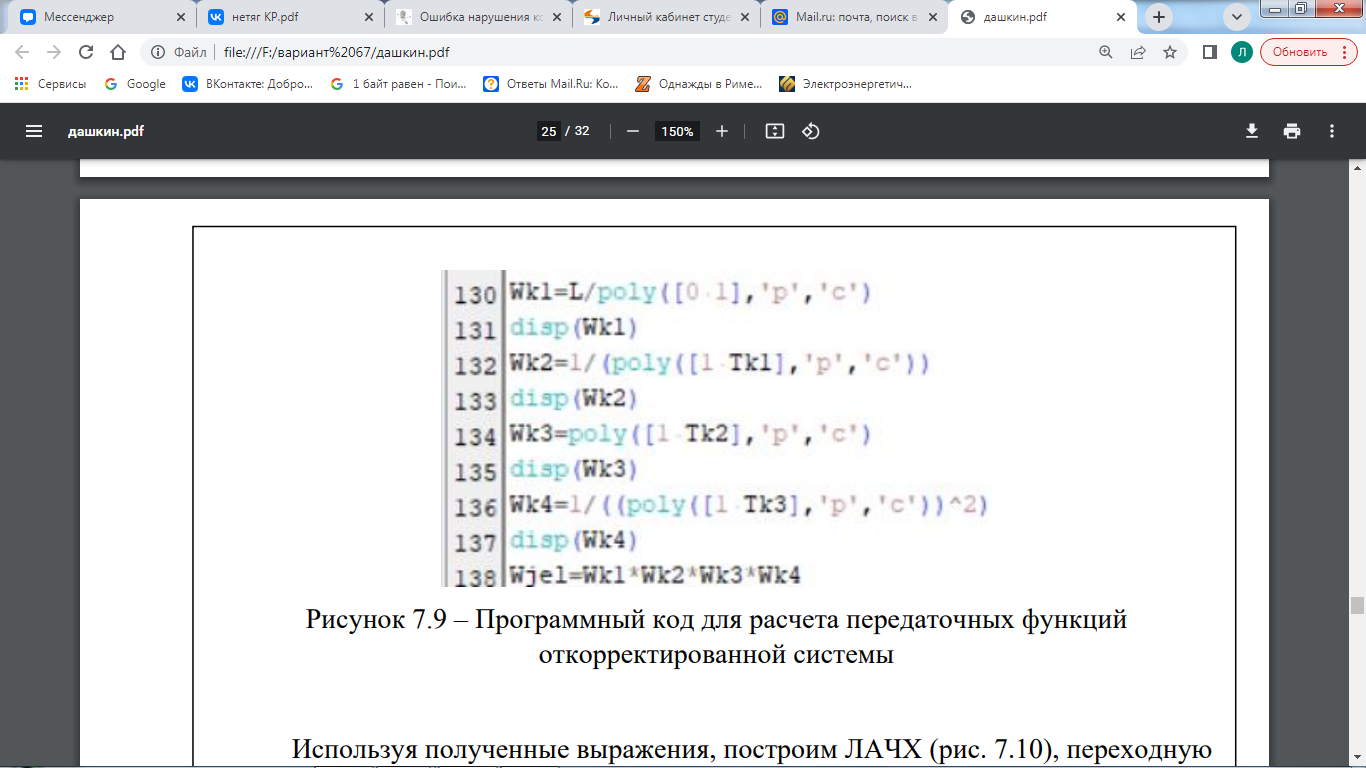
Рисунок 7.9 – Программный код для расчета передаточных функций откорректированной системы
Используя полученные выражения, построим ЛАЧХ (рис. 7.10), переходную характеристику (рис. 7.11) скорректированной системы в Scilab. Необходимый для этого программный код представлен на рисунке 6.12.
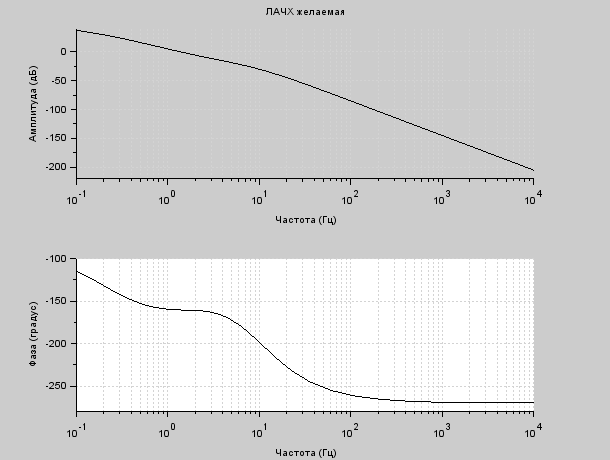
Рисунок 7.10 – ЛАЧХ скорректированной системы
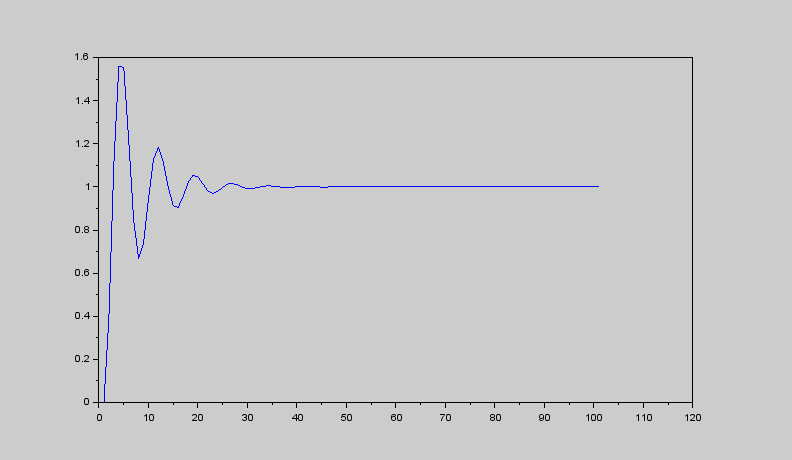
Рисунок 7.11 – Переходная характеристика скорректированной системы
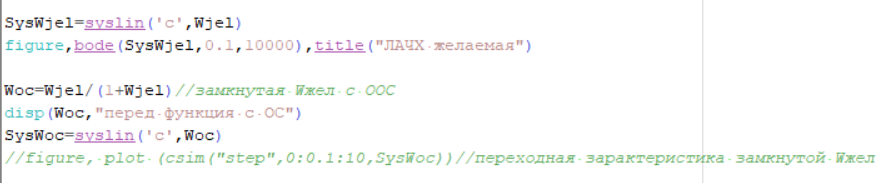
Рисунок 7.12 – Программный код для построения ЛАЧХ и передаточной функции скорректированной системы
Для получения желаемых характеристик систему авторегулирования необходимо скорректировать. Коррекция САР достигается посредством введения в систему дополнительных, так называемых корректирующих элементов (устройств), охватывающих один или несколько элементов исходной системы. Если направления сигналов (воздействий) в корректирующем устройстве совпадает с направлением сигналов в охватываемых им элементах, то связь называют прямой.
Передаточная функция упреждающего корректирующего устройства определяется следующим образом:
  | (7.8) |
АЧХ необходимого регулирующего устройства изображена на рисунке 7.13. Программный код для ее построения приведен на рисунке 7.14.
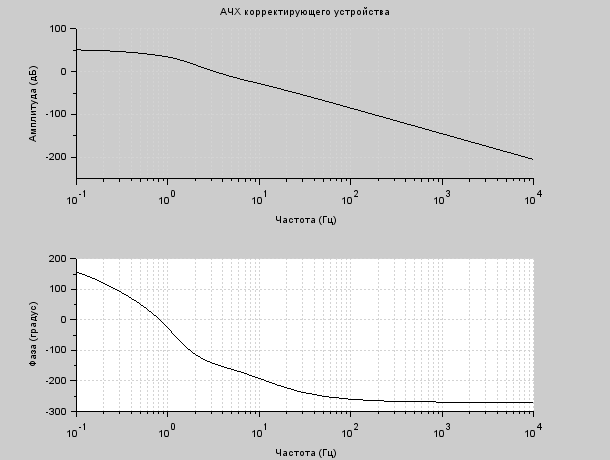
Рисунок 7.13 - АЧХ корректирующего устройства

Рисунок 7.14 – Программный код для вычисления передаточной функции корректирующего устройства и построения его АЧХ
Использование корректирующего устройства с рассчитанными параметрами позволяет сделать САР устойчивой, что необходимо для нормальной и длительной работы этой системы. Передаточная функция желаемой системы определяется произведением передаточных функций разомкнутой (исходной) системы и корректирующего устройства.
8 Реализация моделирования САУ в программе SamSim
Для того, чтобы наглядно убедиться, что данная система устойчива, воспользуемся программой SamSim.
Программа SamSim предназначена для моделирования линейных и нелинейных цепей автоматического управления. Работает с моделями, которые можно представить в форме блок-схем.
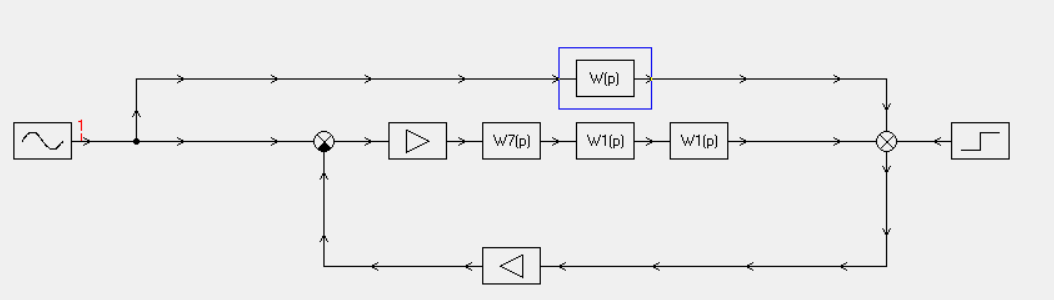
Рисунок 8.1 – Структурная схема САУ в программе SamSim
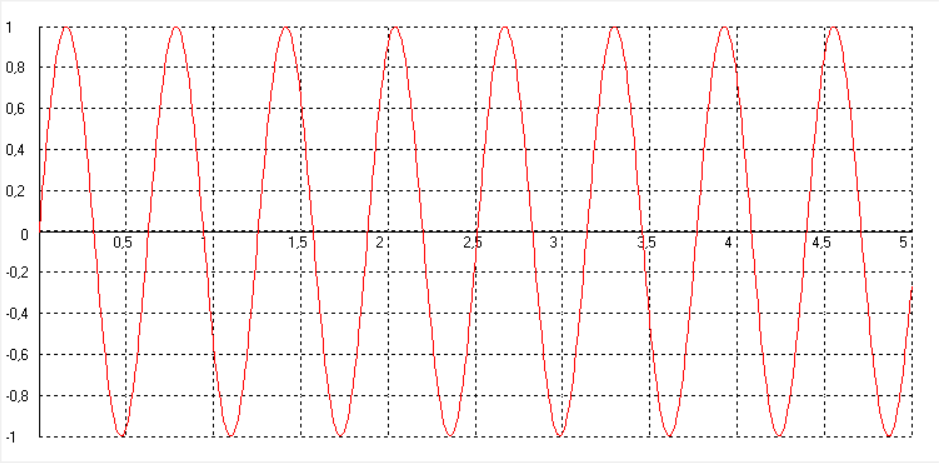
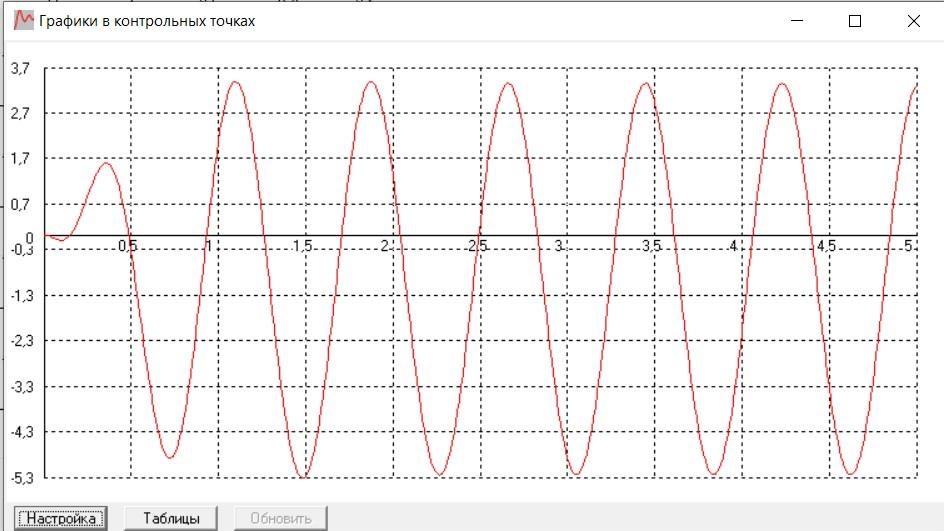
Рисунок 8.2 – График скорректированной системы
Так как график САУ, реализованный в программе электронного моделирования SamSim, представляет собой ограниченную невозрастающую синусоиду, делаем вывод, что данная система устойчива.
Заключение
В ходе выполнения курсового проекта были выполнены все необходимые пункты, а именно:
1. Дано краткое описание работы САУ;
2. Система разбита на элементы;
3. Построена структурная схема САУ;
4. Выведены выражения для передаточных функций системы в разомкнутом и замкнутом состояниях по управляющему и возмущающему воздействиям;
5. Система проверена на устойчивость по критериям устойчивости;
6. Система откорректирована на устойчивость;
7. Реализовано моделирование САУ в SamSim.
В процессе работы было проведено исследование предложенной системы автоматического регулирования с точки зрения её устойчивости и качества процесса регулирования. Согласно критериям, исходная система неустойчива. Были проведены дополнительные расчёты для подбора корректирующего элемента, рассчитаны постоянные времени, с помощью которых исходная система стала устойчивой. Так же был получен опыт разработки систем автоматического регулирования и работы c программой Scilab, а также с программой SamSim.
Список использованных источников
| | 1. | Филиппов С. А. Теория автоматического управления. Методические указания по выполнению курсового проекта. Чита. 2013 – 36 с. |
| | 2 | Видеоматериал, находящийся в свободном доступе/ «Курсовой проект по ТАУ» - [https://www.youtube.com/watch?v=8sgwA_rsspw&t].Паранин, А.В. Ефимов. – Екатеринбург: УрГУПС, 2013–105 с |
| | 3 | Поляков. К. Ю. Теория автоматического управления для «чайников». Санкт-Петербург. 2008. – 80 с. |
| | 4 | ГОСТ 2.105 - 2011 ЕСКД. Общие требования к текстовым документам. – Москва: Стандартинформ, 2018. |
| | 5 | ГОСТ 2.111 – 2013 ЕСКД. Нормоконтроль; |
| | 6 | ГОСТ 24.104-85 Единая система стандартов автоматизированных систем управления. Автоматизированные системы управления. Общие требования; |
| | 7 | ГОСТ 24.701-86 Единая система стандартов автоматизированных систем управления. Надежность автоматизированных систем управления. Основные положения. |