ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 191
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Механическая система электропривода подъема
Проверка правильности выбора преобразователя
Исследование частoтно-регулируемого асинхронного электропривода крана со скалярном управлением
Разработка и исследование систем электропривода с векторным управлением
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
Определение заданной области работы
Момент сопротивления на валу двигателя
Mс.дв. Mэм Mдв.н. 721,339 709,721 11,618 Н×м.
КПД передачи в номинальном режиме
ηпер.н. ηмех ηред 0,93 0,9 0,837 , где
мех 0,9 КПД механической системы;
ред 0,93 КПД редуктора.
Коэффициенты постоянных и переменных потерь
 а 1 мех ред
а 1 мех ред2 мех ред
10,90,93 0,097
2 0,9 0,93 .
Приведенный к валу двигателя момент, обусловленный грузом:
– при максимальном грузе
g mкр mгр Rбар 1
9,81600 15000 0,502 1
Мгрпривмакс i i
592, 436Н×м
4 32, 4
где
пол ред ,
mкр 600 масса крюка;
mгр 15000 масса груза максимальная.
– при минимальном грузе
М g mrh Rбар 1
9,81 600 0,502 1
22.786Н×м
грпривмин
iпол iред
4 32, 4 .
Величина постоянных потерь в механизме
Мсмех а Мгрпривмакс 0,097 592,436 57,686Н×м .
Момент трения на валу первой массы двухмассовой электромеханической системы при максимальном грузе
Mс Mс.дв. Mс.пост 11,618 57,686 69,304Н×м.
Статические моменты:
-
при подъеме максимального груза
Mс1макс Mс.дв. Mс.пост (1 b) Mгр.макс
11,618 57,686 (1 0,097) 592, 436 719, 206 Н× м;
-
при подъеме пустого грузозахватного устройства
Mс1мин Mс.дв. Mс.пост (1 b) Mгр.мин
11,618 57,686 (1 0,097) 22,786 94,3 Н× м;
-
при спуске максимального груза
Mс2макс Mс.дв. Mс.пост (1 b) Mгр.макс
11,618 57,686 (1 0,097) 592, 436 580,598 Н× м;
-
при спуске пустого грузозахватного устройства
Mс2мин Mс.дв. Mс.пост (1 b) Mгр.мин
11,618 57,686 (1 0,097) 22,786 44,3 Н× м;
Заданная область работы приведена на рисунке 7.
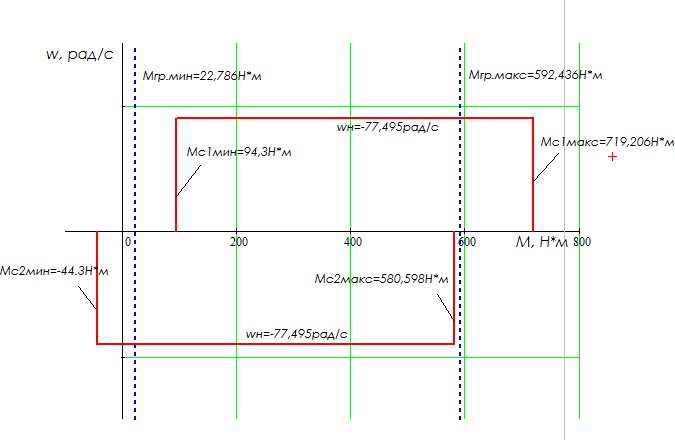
Рисунок 7 – Заданная область работы электропривода
- 1 2 3 4 5 6 7 8 9 ... 15
Выбор преобразователя частоты
Для кранового частотно-регулируемого электропривода требуются преобразователи частоты, специально адаптированные к применению в грузоподъемных кранах и обладающие необходимыми функциональными возможностями:
-
функция управления тормозом предназначена для выдачи сигнала на открытие тормоза при достижении двигателем необходимого момента и сигнала на наложение тормоза при снижении скорости до минимального уровня. Для корректировки снятия тормоза может использоваться функция измерения веса. -
функция подъема с повышенной скоростью. Максимальная скорость подъема определяется автоматически в зависимости от массы груза. -
функция ограничения момента электродвигателя с формированием желаемой механической характеристики в двигательном и генераторном режимах. -
функция формирования заданного темпа разгона и торможения.
функция торможения электропривода с использованием тормозного резистора или блока рекуперации. Экономический эффект от внедрения модулей рекуперации увеличивается: с увеличением мощности электроприводов, при резких торможениях инерционных механизмов, а также при опускании груза на большую глубину (лифты, шахтные подъемники). Учитывая сложившееся мнение о низкой эффективности рекуперации для систем с током потребления до 100 А, а также относительно высокую стоимость модулей рекуперации и сложность внедрения, принято решение использовать тормозной резистор.
-
Параметры преобразователя частоты
С учетом перечисленных выше требований выбираем
преобразовательчастоты AITIVAR71HD75N4
Параметры преобразователя частоты приведены в таблице № 5 Таблица 5
| Тип | Параметры питающей сети | Выходная частота | Выходной ток | ||||
| AITIVAR71HD75N4 | U1л, В | fc, Гц | fи, Гц | Iин, А | Iин макс, А (60 с) | ||
| 380-480 | 50/60 | 0-120 | 167 | 250.5 | |||

Рисунок 8 - Преобразователи частоты Altivar71
Преобразователи частоты Altivar71имеет разнообразные законы
управления двигателем и многочисленные функциональные возможности,отвечают самым строгим требованиям применений.
Отличительные особенности:
-
Встроенные алгоритмы управления: U/f-регулирование, векторное управлене в разомкнутой и замкнутой системе -
Повышенная точность при работе на очень низкой скорости и улучшенные динамические характеристики -
Плавнoе, безударное управление несбалансированными механизмами с помощью системы адаптации мощности (EnergyAdaptationSystem-ENA) -
Расширенный диапазон выходной частоты для высокоскоростных двигателей
- 1 2 3 4 5 6 7 8 9 ... 15