ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 201
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Механическая система электропривода подъема
Проверка правильности выбора преобразователя
Исследование частoтно-регулируемого асинхронного электропривода крана со скалярном управлением
Разработка и исследование систем электропривода с векторным управлением
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
Техническое задание
Разработать регулируемый электропривод мостового крана грузоподъемностью 15 тонн, удовлетворяющий следующим техническим требованиям и характеристикам.
-
Режим работы – повторно-кратковременный. -
Электропривод реверсивный, диапазон регулирования D =1:20. -
Погрешность поддержания заданной частоты не более 10 % на нижней рабочей скорости. -
Управление электроприводом - ручное, с пульта управления обслуживающим персоналом, в автоматизированном режиме поддержания давления с перспективой интеграции в систему управления более высокого уровня. -
Электродвигатель должен быть предназначен для работы в условиях повышенной температуры, иметь закрытое исполнение со степенью защиты не ниже IP21. -
Преобразователь должен быть предназначен для работы в закрытых стационарных помещениях при температуре окружающего воздуха от 5° до 45°С и относительной влажности не более 80% , степень защиты не ниже IP21. -
Система управления электроприводом должна обеспечивать надежную защиту от перегрузок и аварий, простоту управления и обслуживания. -
Сеть трёхфазная, 380 10% В, 50 1Гц.
РЕФЕРАТ
Выпускная квалификационная работа содержит 126 страницу, 42 рисунка, 15 таблиц, 23 используемых источников, 2 листа графического материала. Мостовой кран, асинхронный частотно – регулируемый электропривод, преобразователь частоты, система автоматического
управления,
статические и динамические характеристики.
Объектом модернизации является электропривод мостового крана грузоподъемностью 15 тонн.
Цель работы - разработка частотно регулируемого электропривода в соответствии с требованиями технического задания и исследование его работы методом моделирования на ЭВМ.
В ходе работы был разработан электропривод, удовлетворяющий условиям технического задания.
ВКР выполнена в текстовом редакторе Microsoft Word, статическом редакторе Microsoft Excel, графическом редакторе Visio SP1. Расчёты производились с помощью пакета прикладных программ MathCAD Professional Rus. Имитационное моделирование электропривода выполнено с помощью пакета программ MatLab
СОДЕРЖАНИЕ
Введение 15
-
Технологическая часть 17-
Описание промышленной установки и анализ технологического
-
процесса 17
-
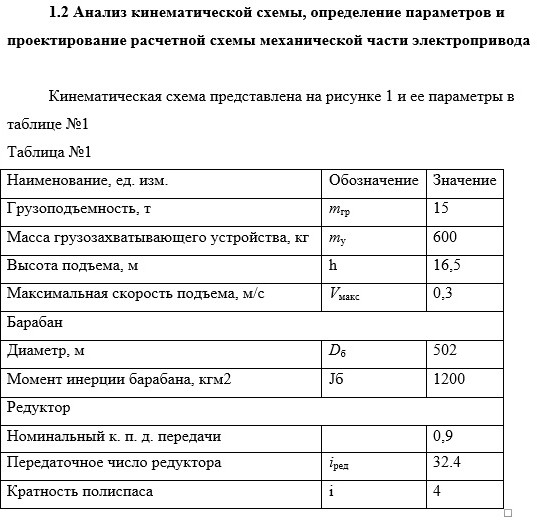
Анализ кинематической схемы, определение параметров и проектирование расчетной схемы механической части
электропривода 18
-
Выбор системы электропривода и автоматизация промышленной
установки 20
-
Литературный обзор по теме выпускной квалификационной
работы 20
-
Определение возможных вариантов и выбор рациональной системы электропривода 21
-
Выбор элементов силового канала электропривода и расчет
параметров 23
-
Выбор электродвигателя и расчет параметров 23-
Расчетные параметры электродвигателя 25 -
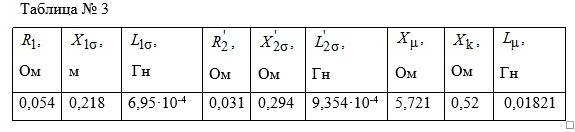
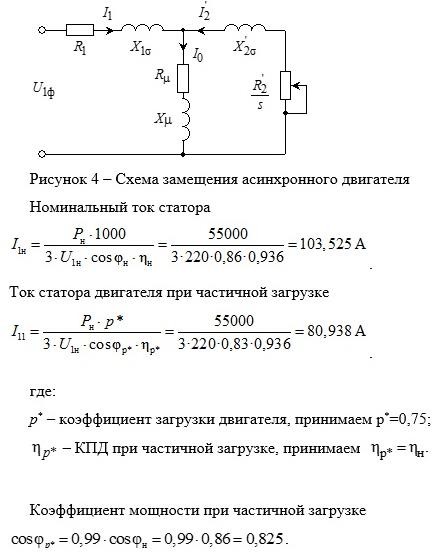
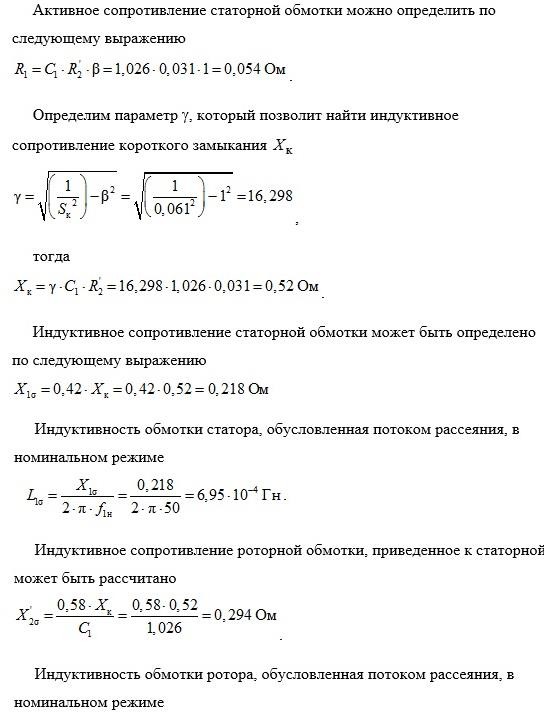
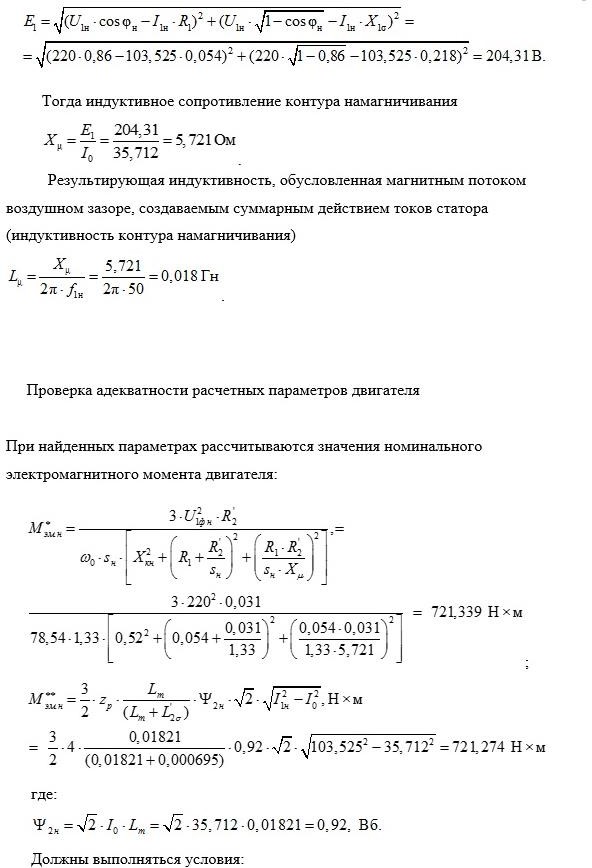
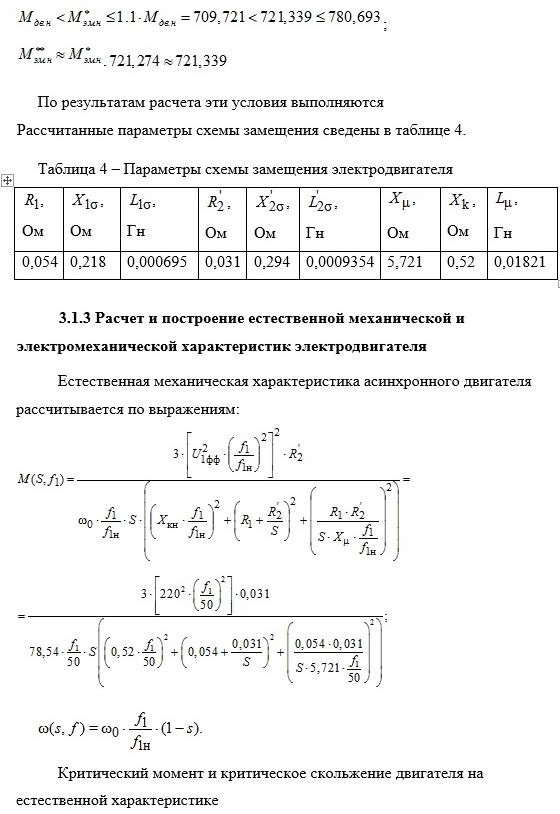
Определение параметров схемы замещения электродвигателя по каталоговым данным 26 -
Расчет и построение естественной механической и
-
электромеханической характеристик электродвигателя 31
3.1.4. Расчет механических и электромеханических характеристик электропривода 35
-
Механическая система электропривода подъема 38-
Параметры элементов механической системы привода 38
-
-
Определение заданной области работы 40 -
Выбор преобразователя частоты 42-
Параметры преобразователя частоты 43 -
Проверка правильности выбора преобразователя 44
-
-
Разработка и исследование электропривoдов со скалярным
управлением 46
-
Разработка имитационных моделей электропривoда со скалярным управлением 46 -
Исследование частoтно-регулируемого асинхронного электроприводакрана со скалярном управлением 54-
Прoграмма исследований электропривода 54 -
Параметры элементoв силового канала электропривода
-
мостового крана 55
-
Разработка и исследование систем электропривода с векторным управлением 62-
Разработка имитационной модели регулируемого
-
электропривода с векторным управлением 62
-
Исследование частотно-регулируемого асинхронного электроприводамостового крана с векторным управлением 76-
Программа исследований электропривода 76
-
-
Исходные параметры настройки САР РЭП 77
-
Финансовый менеджмент, ресурсоэффективность и
Ресурсосбережение 90
-
SWOT-анализ по разработке проекта электропривода
мостового крана 9
-
Планирование технического проекта 93-
Определение структуры работ в рамках технического проектирования 93
-
6.2.2 Определение трудоемкости выполнения работ 95
-
Составление сметы технического проекта 97
-
Затраты на специализированное оборудование 97 -
Полная заработная плата исполнителей ВКР 98 -
Отчисления во внебюджетные фонды
(страховые отчисления) 100
-
Накладные расходы 100 -
Формирование сметы технического проекта 101
-
Определение ресурсоэффективности проекта 101
-
Социальная ответственность 104-
Анализ опасных и вредных факторов 105 -
Техника безопасности 105 -
Производственная санитария 106 -
Расчёт опасности поражения электрическим током 109 -
Расчёт заземления 110 -
Пожарная безопасность 113 -
Охрана окружающей среды 115 -
Защита от чрезвычайных ситуаций 119
-
Заключение 122
Список использованных источников 126
Приложение 1
Приложение 2
Кіріспе

- 1 2 3 4 5 6 7 8 9 ... 15
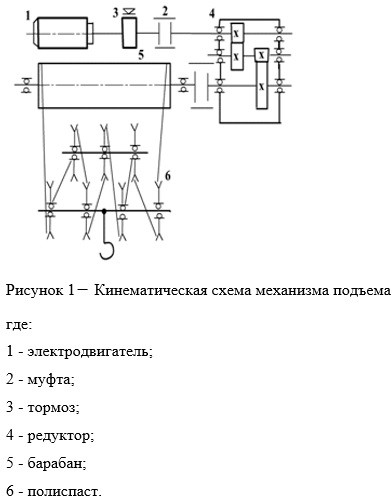
Механическая система электропривода подъема
-
Параметры элементов механической системы привода
Расчетная схема замещения механической системы электропривода может быть представлена в виде одномассовой системы
Мдв
Мс
Рисунок 5 - Расчетная схема механической системы привода
Mдв
Mс
На рисунке 5 приняты следующие обозначения:
– вращающий момент, развиваемый на валу электродвигателя, Н×м;
– момент нагрузки с учетом потерь в механизме, приведенный к валу двигателя,
Н×м;
 – угловая скорость, рад с ;
– угловая скорость, рад с ;Jэ – эквивалентный момент инерции привода, приведенный к валу двигателя, Коэфициент передачи
кг ×м2 .
Кпер
Vн
ω
3,871103
двн ,
Момент инерции барабана приведенный

1
Jбарприв Jбар i 2
1200
1
 32, 42
32, 42 1,143кг ×м2
ред
Приведенный момент инерции максимальный
привмакс кр гр пер
J m
-
m К
2 600 20000 0,0038712 0,234 кг ×м2 ,
Приведенный момент инерции минимальный
J m К 2 600 0,0038712 8,992 103 кг ×м2,
привмин кр пер
Эквивалентный момент инерции максимальный
J J 1.25 J J 3.521 кг ×м ,
2
привмакс привмакс дв барприв
Эквивалентный момент инерции минимальный
привмин привмин дв бар
J J 1.25 J J 8,992 103 1,25 2,631,143 3,296 кг ×м2,
где:
mкр 600 масса крюка;
mгр 15000 масса груза максимальная.
 Мс дв
Мс двМдв.эм
Н м
МсА
(-)
1
1
Jэ р
(-)
МсР
дв рад с
Рисунок 6 – Структурная схема одномассовой механической системы регулируемого электропривода