Файл: "Анализ и оптимизация сар частоты вращения вала двигателя постоянного тока (сар чв дпт) ".docx
Добавлен: 09.01.2024
Просмотров: 101
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Магнитогорский государственный технический университет им. Г.И. Носова»
(ФГБОУ ВО «МГТУ им. Г.И. Носова»)
Кафедра автоматизированных систем управления
курсовая Работа
по дисциплине: «Теория автоматического управления»
на тему: "Анализ и оптимизация САР частоты вращения вала двигателя постоянного тока (САР ЧВ ДПТ) "
Вариант 4
Исполнитель: Власенко В.А., студент 4 курса, группы зАТСб-18-1
Руководитель: Рябчиков Михаил Юрьевич, кандидат технических наук, доцент
Работа допущена к защите «__»_______ 20___г. __________
(подпись)
Работа защищена «__»_____ 20__г. с оценкой_______ _________
(подпись)
Магнитогорск, 2022
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Магнитогорский государственный технический университет им. Г.И. Носова»
(ФГБОУ ВО «МГТУ им. Г.И. Носова»)
Кафедра автоматизированных систем управления
Задание на курсовую Работу
Студенту: Власенко Виктору Александровичу
Задание: построить модель САР, исследовать ее, оптимизировать и оценить качество полученной САР________________________________________________________________
Исходные данные: функциональная схема САР ЧВ ДПТ; параметры элементов САР ЧВ ДПТ:__________________________________________________________________________
1) усилитель:
 ;
;2) тиристорный преобразователь:
 ;
;3) гибкая обратная связь по напряжению:
 ;
;4) тахогенератор, усилительное (пропорциональное) звено:

5) генератор, апериодическое звено:
 ;
;6) двигатель постоянного тока, колебательное звено:

 ;
; 
Срок сдачи: «» 20__ г.
Руководитель: __________________/ М.Ю. Рябчиков
Задание получил: __________________/ В.А. Власенко
Магнитогорск, 2022
СОДЕРЖАНИЕ
с.
Кафедра автоматизированных систем управления 1
Исполнитель: Власенко В.А., студент 4 курса, группы зАТСб-18-1 1
Работа допущена к защите «__»_______ 20___г. __________ 1
Работа защищена «__»_____ 20__г. с оценкой_______ _________ 1
ВВЕДЕНИЕ 4
1 Цель и задачи курсового проекта 4
2 Определение передаточных функций элементов САР ЧВ ДПТ 5
2.1 Функциональная схема и принцип действия САР 5
2.2 Параметры и передаточные функции элементов 7
3 Построение, запуск и анализ модели САР 9
4 Оценка устойчивости и стабилизация разомкнутой САР 10
(предварительная коррекция) 10
4.1 Стабилизация разомкнутой САР 10
4.1.1 Стабилизация контура уменьшением коэффициента усиления усилителя 11
4.1.2 Стабилизация изменением параметров усилителя и звена ОСН 12
4.2 Предварительная коррекция замкнутой САР ДПТ 15
4.2.1 Построение и анализ ЛАЧХ и ЛФЧХ 15
4.2.2 Анализ частотных характеристик и предварительная коррекция САР 17
5 Структурно-параметрическая оптимизация САР 21
5.1 Определение настроечных параметров ПИ – регулятора 21
5.2 Введение ПИ-регулятора в контур управления 22
5.3 Уточнение настроечных параметров ПИ - регулятора 23
6 Оценка качества САР 26
6.1 Показатели качества переходного режима 26
6.2 Показатели качества установившегося режима 27
6.3 САР ЧВ ДПТ осуществляет слежение и стабилизацию 27
ВВЕДЕНИЕ
Методической целью курсового проекта по курсу "Теория автоматического управления" является приобретение и закрепление студентами практических навыков использования современного программного обеспечения для анализа и синтеза относительно простых систем на примере исследования замкнутой системы автоматического регулирования.
-
Цель и задачи курсового проекта
Цель работы: оптимизация типичной линейной системы автоматического регулирования (САР) с использованием программного пакета моделирования систем VisSim.
Задачи работы:
-
анализ задания и исходных данных; -
описание принципа действия САР; -
построение структурно-аналитической модели САР; -
оценка устойчивости и стабилизация САР; -
оптимизация модели; -
экспериментальное определение запасов устойчивости САР; -
экспериментальное определение частотных характеристик САР; -
оценка качества модели;
По мере выполнения работы задачи и способы их решения могут и должны обоснованно уточняться и конкретизироваться. Например, стабилизация разомкнутого контура может потребовать изменения не одного, а нескольких параметров, оптимизация модели - не только изменения параметров, но и структуры модели.
2 Определение передаточных функций элементов САР ЧВ ДПТ
2.1 Функциональная схема и принцип действия САР
САР ЧВ ДПТ – система автоматического регулирования частоты вращения вала двигателя постоянного тока независимого возбуждения.
Расчет будет проведен для нулевого варианта.
Заданием определена функциональная схема САР (рис. 2.1). САР представляет собой замкнутый контур главной обратной связи, который осуществляет управление по отклонению. В контуре имеется и гибкая местная обратная связь, которая предназначена для стабилизации САР, способствует тому, чтобы САР была достаточно устойчивой. Наличие обратных связей в САР свидетельствует о том, что система может быть и неустойчивой, поэтому анализ САР должен включать оценку ее устойчивости и, при необходимости, выбор мер и средств по ее стабилизации.
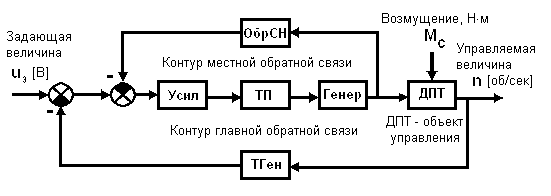
У - усилитель; ТП - тиристорный преобразователь; Г - генератор; ДПТ - двигатель постоянного тока; ТГ - тахогенератор; ОСН - гибкая обратная связь по напряжению. ДПТ – двигатель постоянного тока независимого возбуждения; ДПТ – объект управления, его выходная величина, частота вращения вала n должна соответствовать заданию; uз - напряжение задания, в соответствии с которым должна изменяться частота n вращения вала ДПТ; Мc - возмущающий момент силы, приложенный к валу ДПТ от той машины, которую он приводит в действие.
Рисунок 2.1 - Функциональная схема САР ЧВ ДПТ
Следует отметить, что в предлагаемой схеме фактически изменять можно только параметры усилителя и звена местной обратной связи. Эти элементы введены в схему как раз для того, чтобы обеспечить возможность ее коррекции. Не исключено, что параметры звена обратной связи по напряжению (ОСН) заданы неудачно и потребуют существенной коррекции.
Примечание. Подпись к рисунку должна включать (см. для примера подпись к рис. П1):
-
содержательное название, -
указывать, что видно на рисунке (главное для данной работы) и -
вывод (что следует из увиденного)
Работа САР ЧВ ДПТ в статике
В статике входные, а, следовательно, и выходные, сигналы САР постоянны. На первый, левый сумматор контура главной обратной связи, его сравнивающее устройство, подается задающая величина и величина с выхода тахогенератора, пропорциональная частоте вращения вала. Разностный сигнал e = uз – yтг = uз - kтгn, имеющий малую величину, усиливается усилителем, тиристорным преобразователем и генератором, в результате чего получается входной, управляющий сигнал ДПТ (двигателя постоянного тока, объекта управления), т.е. напряжение на якоре. Вследствие наличия этого напряжения вал двигателя вращается. Поскольку произведение коэффициентов усиления усилителя, тиристорного преобразователя и генератора велико, то получить некоторое конкретное управляющее напряжение на якоре двигателя можно только в том случае, если разностный сигнал e – мал. Это значит, что частота n вращения вала с некоторой точностью пропорциональна заданию uз. Звено обратной связи инерционно-дифференцирующее, поскольку обратная связь по напряжению гибкая, и поэтому оно не влияет на работу САР в статике.
Т.о. САР выполняет свои функции: обеспечивает слежение в статике, поддерживая частоту вращения вала пропорциональной заданию.
Работа САР ЧВ ДПТ в динамике
Изменение задания в первый момент времени приводит к соответствующему росту отклонения, поскольку звенья перед объектом и сам объект обладают инерционностью и поэтому частота вращения вала не может измениться мгновенно. Изменение отклонения, будучи усиленным усилителем, тиристорным преобразователем и генератором, с учетом их инерционности приводит к постепенному изменению управляющей величины – напряжения на якоре, которое плавно изменяет частоту вращения вала так, что ошибка слежения, т.е. отклонение, устремляется к нулю. Обратная связь по напряжению стабилизирует САР и повышает ее быстродействие. Таким образом, осуществляется слежение.
Изменение возмущения, момента на валу двигателя, приводит к изменению частоты вращения, которое, вследствие наличия главной обратной связи приводит к соответствующему изменению отклонения. Это изменение отклонения усиливается и тем самым изменяет величину напряжения на якоре так, что отклонение частоты, вызванное изменением возмущения, компенсируется. Таким образом осуществляется стабилизация частоты вращения вала двигателя.
Итак, САР ЧВ ДПТ обеспечивает как стабилизацию, так и слежение.
2.2 Параметры и передаточные функции элементов
Задача пункта состоит в вычислении параметров передаточных функций и подстановке их в формулы.
Заданием определены типы моделей элементов САР, а также даны их передаточные функции в общем виде.
N=4
У – усилитель моделируется апериодическим звеном с передаточной функцией:
с параметрами:

ТП - тиристорный преобразователь моделируется апериодическим звеном с передаточной функцией:

с параметрами:

ОСН - гибкая обратная связь по напряжению, инерционно-дифференцирующее звено:

с параметрами

ТГ - тахогенератор, усилительное (пропорциональное) звено:

где

Г - генератор, апериодическое звено:
с параметрами

ДТП – двигатель постоянного тока, колебательное звено. Его передаточная функция по каналу управления:

а по каналу возмущения:

где:

 ;
;

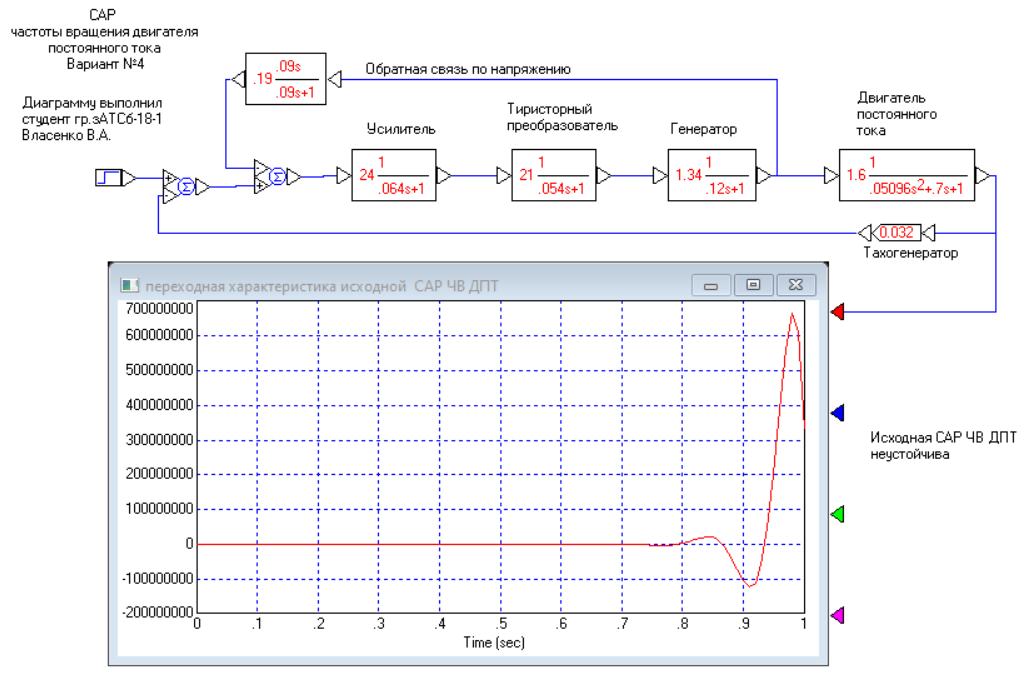
3 Построение, запуск и анализ модели САР
Построение структурной схемы модели САР ЧВ ДПТ рисунке 3.1 и запуск процесса моделирования.