ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 284
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рс=0. Если запас синхронизирующей мощности равен нулю, машина выпадает из синхронизма и перестает работать как синхронный генератор.
При выпадении из синхронизма наступает асинхронный режим. В асинхронном режиме с синхронной машины должно быть снято возбуждение. Этот режим для синхронных машин допускается кратковременно.
Номинальная нагрузка синхронных генераторов обычно рассчитывается при угле θ=20-30°. Поэтому кратковременно машина может работать при 1,5—2-кратном увеличении нагрузки, не выпадая из синхронизма. Отношение называется статической перегружаемостью синхронной машины.
называется статической перегружаемостью синхронной машины.
Статическая перегружаемость определяется формулой:
 (3.34)
(3.34)
Выражение (3.34) получено при условии, что сопротивление обмотки статора равно нулю и не учитывается насыщение.
Статическая перегружаемость турбогенераторов мощностью до 300 МВт должна быть не менее 1,7, а для турбогенераторов мощностью 500-1200 МВт — не менее 1,6. Статическая перегружаемость гидрогенераторов — не ниже 1,7.
Поле в синхронной машине, работающей параллельно с сетью, создается обмоткой возбуждения и реактивными токами, протекающими в обмотке статора. Результирующее поле, как это видно из векторной диаграммы (рисунок 3.12), определяется МДС обмотки статора и обмоткой возбуждения. При изменении тока в обмотке возбуждения изменяется Е0 , что приводит к изменению реактивного тока, замыкающегося в контуре сеть—машина.
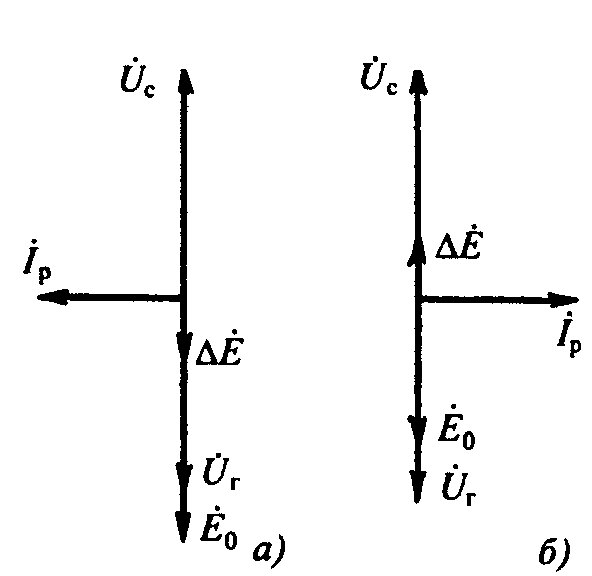
Рисунок 3.12 - Векторные диаграммы при регулировании реактивной мощности
При увеличении тока в обмотке возбуждения (перевозбуждении машины) вектор Uс не будет уравновешивать Е0 и появится «избыточная» ЭДС ΔЕ=U+Е0 (рисунок 8.4а), которая вызовет появление реактивного тока:
 (3.35)
(3.35)
где Iр — реактивный ток, отстающий от ΔЕ и напряжения генератора Uг.
По отношению к напряжению сети Iр — опережающий ток. При уменьшении тока возбуждения (недовозбуждении машины) U > Е0 (рисунок 8.4б) и реактивный ток Iр отстает от напряжения сети.
Изменяя ток возбуждения, можно регулировать cosφ синхронного генератора, работающего параллельно с сетью. Минимуму тока статора на U-образной характеристике соответствует
cosφ=l. При увеличении активной мощности, отдаваемой генератором в сеть, U-образные характеристики будут располагаться выше, при этом точки, соответствующие минимальному току статора (активному току Iа) и cosφ=l, будут перемещаться вправо. Объясняется это тем, что при увеличении Iа возрастает падение напряжения в статоре, и чтобы уравновесить это падение напряжения, потребуется увеличение тока возбуждения Iв.
Если при всех изменениях тока возбуждения вращающий момент приводного двигателя остается неизменным, то также неизменной остается активная мощность генератора:
 (3.36)
(3.36)
Из этого выражения следует, что при Uc=const активная составляющая тока статора I1•cosφ = const.
Таким образом, степень возбуждения синхронного генератора влияет только на реактивную составляющую тока статора. Что же касается активной составляющей тока, то она остается неизменной.
Зависимость тока статора I1 от тока в обмотке возбуждении Iв при неизменной активной нагрузке генератора выражается графически U-образной кривой. На рисунке 3.13 представлены U-образные характеристики I1 =f(Iв) при Р2 = const, построенные для разных значений активной нагрузки: P2 = 0; Р2 = 0,5Рном и P2 = Рном
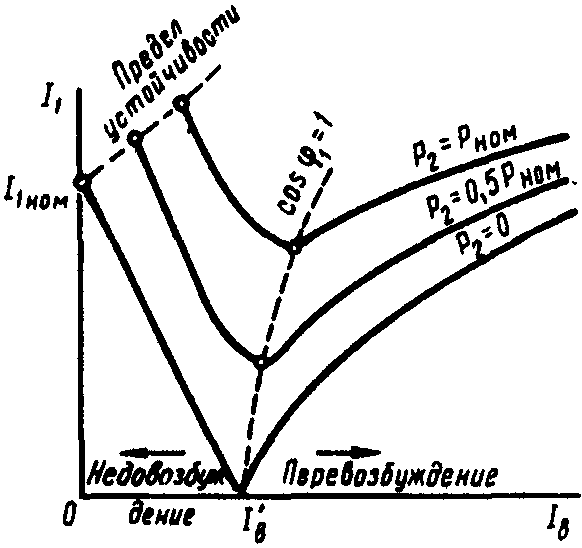
Рисунок 3.13 - U-образные характеристики синхронного генератора работающего параллельно с сетью при различных значениях нагрузки
U-образные характеристики синхронного генератора показывают, что любой нагрузке генератора соответствует такое значение тока возбуждения Iв', при котором ток статора I1 становится минимальным и равным только активной составляющей. В этом случае генератор работает при коэффициенте мощности cosφ=1. Значения тока возбуждения, соответствующие
cosφ=1 при различной нагрузке генератора, показаны пунктирной линией. Некоторое отклонение линии вправо указывает на то, что при увеличении нагрузки ток возбуждения, соответствующий cosφ=1 , несколько возрастает. Объясняется это тем, что при росте нагрузки необходимо некоторое увеличение тока возбуждения, компенсирующее активное падение напряжения.
Необходимо иметь в виду, что при постепенном уменьшении тока возбуждения наступает такое минимальное его значение, при котором магнитный поток обмотки возбуждения оказывается настолько ослабленным, что синхронный генератор выпадает из синхронизма — нарушается магнитная связь между возбужденными полюсами ротора и вращающимся полем статора. Если соединить все точки минимально допустимых значений тока возбуждения на U-образных характеристиках (штриховая линия в левой части рисунка3.13), то получим линию предела устойчивости работы синхронного генератора при недовозбуждении.
С точки зрения уменьшения потерь генератора наиболее выгодным является возбуждение, соответствующее минимальному току статора, т. е. когда cosφ=1. Но в большинстве случаев нагрузка генератора имеет индуктивный характер и для компенсации индуктивных токов (отстающих по фазе от напряжения сети) приходится несколько перевозбуждать генератор, создавая условия, при которых ток статора I1 опережает по фазе напряжение сети Uс.
Следует отметить, что для сохранения cosφ неизменным при изменениях активной нагрузки генератора, требуется одновременное изменение тока возбуждения генератора.
Синхронные двигатели применяются главным образом для привода устройств большой мощности. Такие двигатели по своим технико-экономическим показателям превосходят двигатели других типов.
Большую группу синхронных машин составляют синхронные двигатели, которые обычно изготовляются мощностью до нескольких тысяч киловатт и предназначены для привода мощных вентиляторов, мельниц, насосов и других устройств, не требующих регулирования частоты вращения.
Характерным отличием синхронных двигателей является постоянство частоты вращения при изменении нагрузки. Синхронные двигатели имеют предельно жесткие механические характеристики.
Максимальный момент синхронного двигателя пропорционален U, а асинхронного —
U2, поэтому синхронные двигатели менее чувствительны к изменению напряжения сети и имеют большую перегрузочную способность. Регулирование потока возбуждения путем изменения тока возбуждения обеспечивает регулирование реактивной мощности при падении напряжения и уменьшении частоты сети.
Недостатком синхронных двигателей является их более сложная конструкция, необходимость в источнике постоянного тока и худшие по сравнению с асинхронными двигателями пусковые свойства.
При мощности двигателей от нескольких киловатт до 100 кВт проявляется еще один недостаток синхронных двигателей — склонность к качаниям. При определенном соотношении параметров синхронных двигателей ротор покачивается около синхронной частоты вращения.
Синхронные двигатели при условии легких пусков целесообразно применять при мощности свыше 200 кВт. Области применения синхронных двигателей непрерывно расширяются, и их мощности возрастают до 50 МВт.
Синхронные двигатели мощностью до 1—2 кВт выполняются с явнополюсным ротором без обмотки возбуждения. За счет различия проводимости по продольной и поперечной осям машины в таких машинах возникает реактивный момент, а асинхронный пуск обеспечивается демпферной обмоткой.
Синхронные двигатели конструктивно почти не отличаются от синхронных генераторов. Они также состоят из статора с обмоткой и ротора. Поэтому независимо от режима работы любая синхронная машина нуждается в процессе возбуждения — наведения в ней магнитного поля.
Для возбуждения синхронных двигателей используется электромашинная система возбуждения или тиристорная система возбуждения. В электромашинных системах возбуждения якорь возбудителя — генератора постоянного тока — соединяется с валом синхронного двигателя жестко или в тихоходных машинах — через клиноременную передачу, которая обеспечивает увеличение частоты вращения возбудителя и снижение его массы. Системы возбуждения синхронных двигателей принципиально не отличаются от систем возбуждения генераторов.
Ротор синхронного двигателя вращается с той же скоростью, что и магнитное поле машины. Синхронное вращение можно объяснить взаимодействием полюсов ротора и полюсов результирующего вращающегося поля. Вращающееся магнитное поле вследствие взаимодействия полей статора и ротора увлекает за собой ротор. При нагрузке двигателя под воздействием тормозного момента его ротор, продолжая вращаться синхронно, смещается относительно результирующего поля машины на угол
θ. Чем больше нагрузка на валу, тем больше угол θ. Под углом θ, как и раньше, понимается угол между осью полюсов ротора и осью результирующего поля. Но в отличие от генератора, где ротор опережает поле, в двигателе он отстает от поля, т. е. является ведомым, поэтому для двигателей этот угол принимают отрицательным.
При построении векторной диаграммы синхронного двигателя принято фазу тока определять по отношению к вектору напряжения сети Uc. Построение векторных диаграмм синхронного двигателя при известных Uд , I и угле между ними выполняется так же, как и для генератора.
Исходя из уравнения:
 (4.1)
(4.1)
Если при построении векторной диаграммы исходить из известного напряжения сети Uc=U, то уравнение (4.1) будет иметь вид:
 (4.2)
(4.2)
На рисунке 4.1 показаны векторы МДС обмотки возбуждения и составляющих реакции статора.
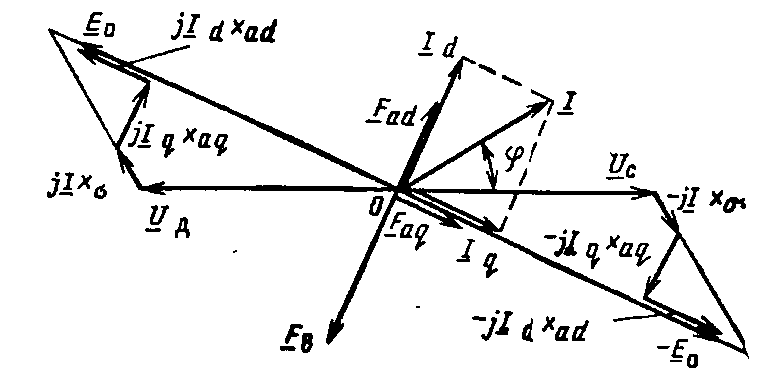
Рисунок 4.1 - Векторная диаграмма явнополюсного синхронного двигателя
Первый вектор отложен в сторону опережения ЭДС Е0 на 90°, а два других — в фазе с токами Id и Iq. Из рисунка 9.1 видно, что продольная реакция статора в синхронном двигателе при опережающем токе действует размагничивающим образом (Fad направлен против FВ). Аналогично можно показать, что при отстающем токе продольная реакция статора будет оказывать намагничивающее действие.
Уравнения для электромагнитной мощности синхронного двигателя можно получить из векторных диаграмм. Если пренебречь активным сопротивлением обмотки статора, то для явнополюсного двигателя электромагнитная мощность будет равна:
 (4.3)
(4.3)
В неявнополюсном двигателе Xd=Xq, и поэтому вторая составляющая Р" будет отсутствовать.
Разделим (4.3) на угловую скорость ротора:
 (4.4)
(4.4)
Тогда электромагнитный момент:

При выпадении из синхронизма наступает асинхронный режим. В асинхронном режиме с синхронной машины должно быть снято возбуждение. Этот режим для синхронных машин допускается кратковременно.
Номинальная нагрузка синхронных генераторов обычно рассчитывается при угле θ=20-30°. Поэтому кратковременно машина может работать при 1,5—2-кратном увеличении нагрузки, не выпадая из синхронизма. Отношение
называется статической перегружаемостью синхронной машины.Статическая перегружаемость определяется формулой:
(3.34)Выражение (3.34) получено при условии, что сопротивление обмотки статора равно нулю и не учитывается насыщение.
Статическая перегружаемость турбогенераторов мощностью до 300 МВт должна быть не менее 1,7, а для турбогенераторов мощностью 500-1200 МВт — не менее 1,6. Статическая перегружаемость гидрогенераторов — не ниже 1,7.
Поле в синхронной машине, работающей параллельно с сетью, создается обмоткой возбуждения и реактивными токами, протекающими в обмотке статора. Результирующее поле, как это видно из векторной диаграммы (рисунок 3.12), определяется МДС обмотки статора и обмоткой возбуждения. При изменении тока в обмотке возбуждения изменяется Е0 , что приводит к изменению реактивного тока, замыкающегося в контуре сеть—машина.
Рисунок 3.12 - Векторные диаграммы при регулировании реактивной мощности
При увеличении тока в обмотке возбуждения (перевозбуждении машины) вектор Uс не будет уравновешивать Е0 и появится «избыточная» ЭДС ΔЕ=U+Е0 (рисунок 8.4а), которая вызовет появление реактивного тока:
(3.35)где Iр — реактивный ток, отстающий от ΔЕ и напряжения генератора Uг.
По отношению к напряжению сети Iр — опережающий ток. При уменьшении тока возбуждения (недовозбуждении машины) U > Е0 (рисунок 8.4б) и реактивный ток Iр отстает от напряжения сети.
Изменяя ток возбуждения, можно регулировать cosφ синхронного генератора, работающего параллельно с сетью. Минимуму тока статора на U-образной характеристике соответствует
cosφ=l. При увеличении активной мощности, отдаваемой генератором в сеть, U-образные характеристики будут располагаться выше, при этом точки, соответствующие минимальному току статора (активному току Iа) и cosφ=l, будут перемещаться вправо. Объясняется это тем, что при увеличении Iа возрастает падение напряжения в статоре, и чтобы уравновесить это падение напряжения, потребуется увеличение тока возбуждения Iв.
Если при всех изменениях тока возбуждения вращающий момент приводного двигателя остается неизменным, то также неизменной остается активная мощность генератора:
(3.36)Из этого выражения следует, что при Uc=const активная составляющая тока статора I1•cosφ = const.
Таким образом, степень возбуждения синхронного генератора влияет только на реактивную составляющую тока статора. Что же касается активной составляющей тока, то она остается неизменной.
Зависимость тока статора I1 от тока в обмотке возбуждении Iв при неизменной активной нагрузке генератора выражается графически U-образной кривой. На рисунке 3.13 представлены U-образные характеристики I1 =f(Iв) при Р2 = const, построенные для разных значений активной нагрузки: P2 = 0; Р2 = 0,5Рном и P2 = Рном
Рисунок 3.13 - U-образные характеристики синхронного генератора работающего параллельно с сетью при различных значениях нагрузки
U-образные характеристики синхронного генератора показывают, что любой нагрузке генератора соответствует такое значение тока возбуждения Iв', при котором ток статора I1 становится минимальным и равным только активной составляющей. В этом случае генератор работает при коэффициенте мощности cosφ=1. Значения тока возбуждения, соответствующие
cosφ=1 при различной нагрузке генератора, показаны пунктирной линией. Некоторое отклонение линии вправо указывает на то, что при увеличении нагрузки ток возбуждения, соответствующий cosφ=1 , несколько возрастает. Объясняется это тем, что при росте нагрузки необходимо некоторое увеличение тока возбуждения, компенсирующее активное падение напряжения.
Необходимо иметь в виду, что при постепенном уменьшении тока возбуждения наступает такое минимальное его значение, при котором магнитный поток обмотки возбуждения оказывается настолько ослабленным, что синхронный генератор выпадает из синхронизма — нарушается магнитная связь между возбужденными полюсами ротора и вращающимся полем статора. Если соединить все точки минимально допустимых значений тока возбуждения на U-образных характеристиках (штриховая линия в левой части рисунка3.13), то получим линию предела устойчивости работы синхронного генератора при недовозбуждении.
С точки зрения уменьшения потерь генератора наиболее выгодным является возбуждение, соответствующее минимальному току статора, т. е. когда cosφ=1. Но в большинстве случаев нагрузка генератора имеет индуктивный характер и для компенсации индуктивных токов (отстающих по фазе от напряжения сети) приходится несколько перевозбуждать генератор, создавая условия, при которых ток статора I1 опережает по фазе напряжение сети Uс.
Следует отметить, что для сохранения cosφ неизменным при изменениях активной нагрузки генератора, требуется одновременное изменение тока возбуждения генератора.
-
СИНХРОННЫЕ ДВИГАТЕЛИ
Синхронные двигатели применяются главным образом для привода устройств большой мощности. Такие двигатели по своим технико-экономическим показателям превосходят двигатели других типов.
Большую группу синхронных машин составляют синхронные двигатели, которые обычно изготовляются мощностью до нескольких тысяч киловатт и предназначены для привода мощных вентиляторов, мельниц, насосов и других устройств, не требующих регулирования частоты вращения.
Характерным отличием синхронных двигателей является постоянство частоты вращения при изменении нагрузки. Синхронные двигатели имеют предельно жесткие механические характеристики.
Максимальный момент синхронного двигателя пропорционален U, а асинхронного —
U2, поэтому синхронные двигатели менее чувствительны к изменению напряжения сети и имеют большую перегрузочную способность. Регулирование потока возбуждения путем изменения тока возбуждения обеспечивает регулирование реактивной мощности при падении напряжения и уменьшении частоты сети.
Недостатком синхронных двигателей является их более сложная конструкция, необходимость в источнике постоянного тока и худшие по сравнению с асинхронными двигателями пусковые свойства.
При мощности двигателей от нескольких киловатт до 100 кВт проявляется еще один недостаток синхронных двигателей — склонность к качаниям. При определенном соотношении параметров синхронных двигателей ротор покачивается около синхронной частоты вращения.
Синхронные двигатели при условии легких пусков целесообразно применять при мощности свыше 200 кВт. Области применения синхронных двигателей непрерывно расширяются, и их мощности возрастают до 50 МВт.
Синхронные двигатели мощностью до 1—2 кВт выполняются с явнополюсным ротором без обмотки возбуждения. За счет различия проводимости по продольной и поперечной осям машины в таких машинах возникает реактивный момент, а асинхронный пуск обеспечивается демпферной обмоткой.
Синхронные двигатели конструктивно почти не отличаются от синхронных генераторов. Они также состоят из статора с обмоткой и ротора. Поэтому независимо от режима работы любая синхронная машина нуждается в процессе возбуждения — наведения в ней магнитного поля.
Для возбуждения синхронных двигателей используется электромашинная система возбуждения или тиристорная система возбуждения. В электромашинных системах возбуждения якорь возбудителя — генератора постоянного тока — соединяется с валом синхронного двигателя жестко или в тихоходных машинах — через клиноременную передачу, которая обеспечивает увеличение частоты вращения возбудителя и снижение его массы. Системы возбуждения синхронных двигателей принципиально не отличаются от систем возбуждения генераторов.
Ротор синхронного двигателя вращается с той же скоростью, что и магнитное поле машины. Синхронное вращение можно объяснить взаимодействием полюсов ротора и полюсов результирующего вращающегося поля. Вращающееся магнитное поле вследствие взаимодействия полей статора и ротора увлекает за собой ротор. При нагрузке двигателя под воздействием тормозного момента его ротор, продолжая вращаться синхронно, смещается относительно результирующего поля машины на угол
θ. Чем больше нагрузка на валу, тем больше угол θ. Под углом θ, как и раньше, понимается угол между осью полюсов ротора и осью результирующего поля. Но в отличие от генератора, где ротор опережает поле, в двигателе он отстает от поля, т. е. является ведомым, поэтому для двигателей этот угол принимают отрицательным.
При построении векторной диаграммы синхронного двигателя принято фазу тока определять по отношению к вектору напряжения сети Uc. Построение векторных диаграмм синхронного двигателя при известных Uд , I и угле между ними выполняется так же, как и для генератора.
Исходя из уравнения:
(4.1)Если при построении векторной диаграммы исходить из известного напряжения сети Uc=U, то уравнение (4.1) будет иметь вид:
(4.2)На рисунке 4.1 показаны векторы МДС обмотки возбуждения и составляющих реакции статора.
Рисунок 4.1 - Векторная диаграмма явнополюсного синхронного двигателя
Первый вектор отложен в сторону опережения ЭДС Е0 на 90°, а два других — в фазе с токами Id и Iq. Из рисунка 9.1 видно, что продольная реакция статора в синхронном двигателе при опережающем токе действует размагничивающим образом (Fad направлен против FВ). Аналогично можно показать, что при отстающем токе продольная реакция статора будет оказывать намагничивающее действие.
Уравнения для электромагнитной мощности синхронного двигателя можно получить из векторных диаграмм. Если пренебречь активным сопротивлением обмотки статора, то для явнополюсного двигателя электромагнитная мощность будет равна:
(4.3)В неявнополюсном двигателе Xd=Xq, и поэтому вторая составляющая Р" будет отсутствовать.
Разделим (4.3) на угловую скорость ротора:
(4.4)Тогда электромагнитный момент: