ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 285
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
(4.5)
В двигателе электромагнитный вращающий момент направлен в сторону вращения ротора.
В явнополюсном двигателе за счет второй составляющей М" (реактивного момента) вращающий момент может создаваться и при отсутствии возбуждения Iв=0 (E0=0).
На рисунке 9.3 показана угловая характеристика M=f(θ). Область двигательного режима находится в зоне отрицательных углов θ. Устойчивой частью угловой характеристики в двигательном режиме является область от 0 до -90°. Номинальный момент, соответствующий θном , находится в области 20—30°. Двигатель с неявнополюсным ротором имеет максимум момента при θ=-90°:
 (4.6)
(4.6)
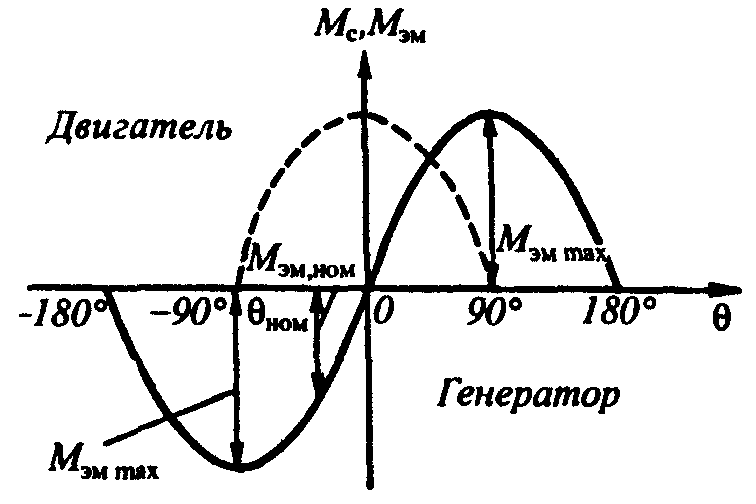
Рисунок 4.2 - Угловая характеристика синхронного двигателя.
Максимальный момент зависит от размера воздушного зазора двигателя. Чем больше зазор, тем меньше xd и больше Мэм.max
Однако при большом зазоре растут габариты машины.
Предел статической устойчивости синхронного двигателя:
 (4.7)
(4.7)
Удельный синхронизирующий момент, как и в генераторном режиме, максимален при θ = 0 и равен нулю при θ = 90°.
Величина Мmах характеризует перегрузочную способность машины.
Кратность максимального момента определяется по формуле:
 (4.8)
(4.8)
Согласно ГОСТ 183-74 эта кратность должна быть не менее 1,65.
Зависимость M=f(θ), представляющая собой угловую характеристику синхронного двигателя, является его механической характеристикой. При номинальной нагрузке θном=20—30°.
Синхронный двигатель потребляет электрическую мощность P1 из сети. Часть этой мощности расходуется на электрические потери в обмотке статора Рэ1 и магнитные потери Рмв статоре, а остальная ее часть передается вращающимся магнитным полем от статора к ротору. Эта мощность называется электромагнитной.
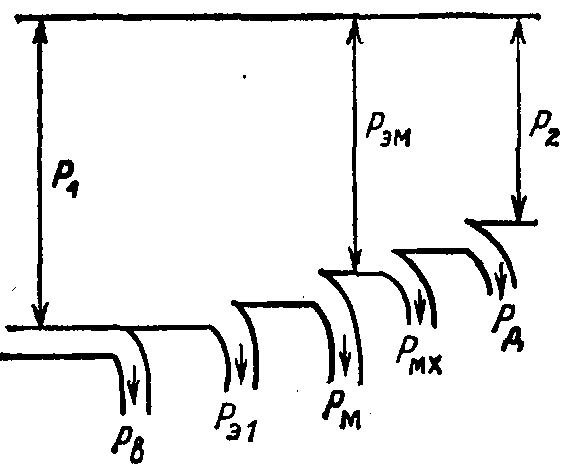
Рисунок 4.3 - Преобразование мощности в синхронном двигателе
Электромагнитная мощность
Рэм преобразуется в механическую, развиваемую ротором. Частично мощность Рэм расходуется на покрытие механических Рмх и добавочных Рд потерь. Оставшаяся ее часть Р2 является полезной механической мощностью на валу двигателя.
U-образные характеристики для различных значений Р (или М) представлены на рисунке 4.4.
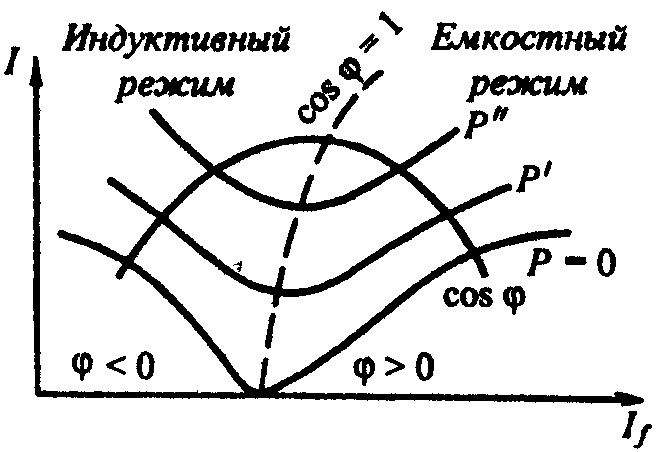
Рисунок 4.4 - U-образные характеристики синхронного двигателя при различных значениях нагрузки.
При перевозбуждении двигатель генерирует реактивную мощность непосредственно у потребителя, что способствует повышению cosφ сети. Это позволяет снизить реактивную мощность, вырабатываемую синхронными генераторами на электрических станциях, и уменьшить потери в линиях электропередач. Возможность генерировать реактивную мощность выгодно отличает синхронные двигатели от асинхронных, которые потребляют реактивную мощность для возбуждения. Поэтому синхронные двигатели проектируются для работы при номинальной мощности с перевозбуждением (с опережающим током) и cosφном=0,9. Работа с перевозбуждением предпочтительна также и для повышения максимального момента двигателя.
Отсюда следует, что при любых нагрузках на валу синхронные двигатели могут работать с различными значениями cosφ, в том числе и с cosφ=1. Достигается это изменением тока в обмотке возбуждения.
Синхронный двигатель непосредственным включением обмотки статора (якоря) в сеть переменного тока не может быть запущен в ход.
Объясняется это следующим образом. При включении многофазной обмотки статора в сеть практически мгновенно образуется вращающееся магнитное поле, частота вращения которого n зависит от частоты f протекающего по обмоткам тока:
 (4.9)
(4.9)
Полюса этого поля, перемещаясь в пространстве, будут взаимодействовать то с одноименными, то с разноименными полюсами неподвижного, возбужденного ротора. В соответствии с этим будет меняться направление вращающего момента, действующего на ротор. В течение половины периода изменения тока в обмотках момент будет направлен в одну сторону, а в течение другой половины — в противоположную.
Пуск мог бы произойти, если бы ротор разогнался до установившейся скорости в течение полупериода, когда вращающий момент не меняет свой знак. При частоте 50 Гц полупериод равен 0,01 с. Из-за механической инерции за такое время роторы практически всех синхронных двигателей развернуться не смогут.
Существует несколько способов пуска двигателя. Эти способы заключаются в том, что в процессе пуска ротор двигателя разгоняется до скорости вращающегося поля, после чего двигатель входит в синхронизм и начинает работать как синхронный. Применение получили пуск с помощью разгонного двигателя, частотный пуск и асинхронный пуск. Наибольшее распространение имеет асинхронный пуск.
Пуск с помощью разгонного двигателя состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины разгоняется до номинальной скорости. Обмотка возбуждения включена в сеть постоянного тока, а обмотка статора разомкнута. Затем производят включение ее на параллельную работу с сетью. После подключения машины к сети разгонный двигатель механически отсоединяют от вала синхронной машины, и последняя переходит в двигательный режим. Мощность разгонного двигателя невелика и составляет 10—20% номинальной мощности синхронного двигателя. Эта мощность покрывает мощность механических и магнитных потерь в синхронном двигателе.
Частотный пуск
применяется в том случае, если синхронный двигатель подключен к автономному источнику, частоту напряжения которого можно изменять от нуля до номинальной. Если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться скорость магнитного поля. Ротор, следуя за полем, постепенно будет повышать свою скорость от нуля до номинальной. В процессе пуска машина все время работает в синхронном режиме.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого на роторе в полюсных наконечниках размещают пусковую обмотку. Эта обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет то же устройство, что и демпферная обмотка генератора. При пуске трехфазная обмотка статора включается в сеть. Ток, который будет протекать по этой обмотке, создаст вращающееся магнитное поле. Оно наведет в пусковой обмотке ротора ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем образуется момент, под действием которого ротор придет во вращение и разгонится до скорости, близкой к скорости поля ω1. Вращение его будет происходить со скольжением, которое зависит от нагрузки на валу (ω < ω1).
Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения за счет возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель. При пуске обмотка возбуждения не должна быть разомкнутой, так как в противоположном случае вследствие большого числа витков в ней вращающимся полем индуцировалась бы большая ЭДС, опасная не только для изоляции, но и для обслуживающего персонала. Обмотку возбуждения нельзя также замыкать накоротко, так как в этом случае она образует несимметричный (однофазный) контур. Он явится причиной образования дополнительного момента, под действием которого произойдет провал в кривой механической характеристики вблизи полусинхронной скорости.
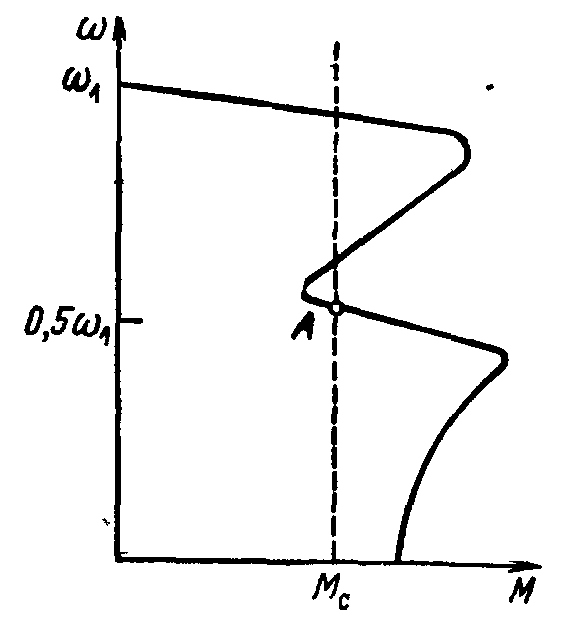
Рисунок 4.5 - Механическая характеристика двигателя при асинхронном пуске с провалом вблизи полусинхронной скорости.
Из-за этого ротор при пуске может застрять на промежуточной скорости (в точке А на рисунке 4.5). В начале пуска обмотка возбуждения должна быть замкнута на резистор с сопротивлением, приблизительно в 10—15 раз большим, чем сопротивление самой обмотки
. По окончании пуска обмотка возбуждения включается в сеть постоянного тока.
Асинхронный пуск синхронного двигателя характеризуется значениями пускового тока Iп и вращающих моментов — начального пускового Мп и входного Мвх. Входным называется асинхронный момент при скорости ротора, равной 0,95ω1. Этот момент равен наибольшему нагрузочному моменту, при котором возможно вхождение двигателя в синхронизм при включении постоянного тока в обмотку возбуждения.
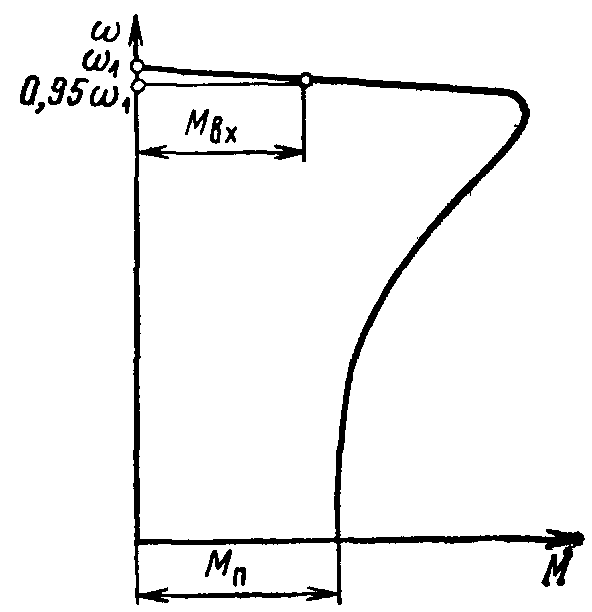
Рисунок 4.6 - Механическая характеристика двигателя при асинхронном пуске.
Если сеть, в которую включается синхронный двигатель, недостаточно мощна, то во избежание большого падения напряжения при асинхронном пуске применяют меры для снижения начального пускового тока: включение через автотрансформатор, реактор и т.д.
4.2 Рабочие характеристики.
Рабочие характеристики синхронного двигателя представляют собой зависимости тока статора Iа, электрической мощности P1, поступающей в обмотку статора, КПД и cosφ от отдаваемой механической мощности P2 при Uс=const, fс=const и Iв=const.
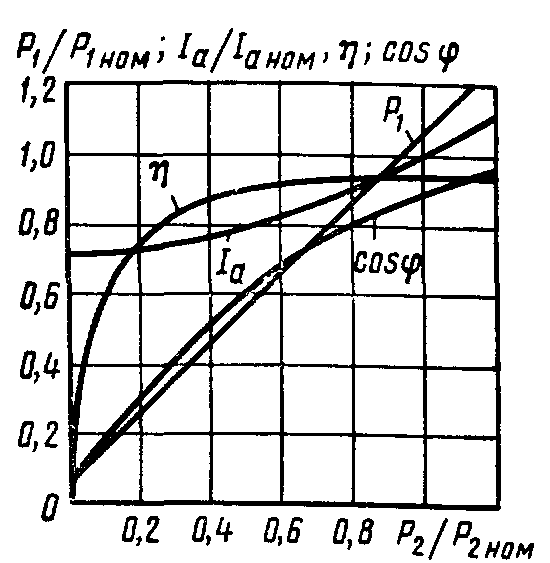
Рисунок 4.7 - Рабочие характеристики синхронного двигателя.
Часто эти характеристики строят в относительных единицах. Поскольку частота вращения синхронного двигателя постоянна, зависимость n2=f(Р2) обычно не приводится.
Зависимость P1=f(P2) имеет характер, близкий к линейному.
 (4.10)
(4.10)
Мощность Р2 является полезной мощностью синхронного двигателя:
 (4.11)
(4.11)
Полезный момент на валу синхронного двигателя:
 (4.12)
(4.12)
Ток двигателя при холостом ходе является практически реактивным. По мере роста нагрузки возрастает активная составляющая тока, в связи с чем зависимость тока
В двигателе электромагнитный вращающий момент направлен в сторону вращения ротора.
В явнополюсном двигателе за счет второй составляющей М" (реактивного момента) вращающий момент может создаваться и при отсутствии возбуждения Iв=0 (E0=0).
На рисунке 9.3 показана угловая характеристика M=f(θ). Область двигательного режима находится в зоне отрицательных углов θ. Устойчивой частью угловой характеристики в двигательном режиме является область от 0 до -90°. Номинальный момент, соответствующий θном , находится в области 20—30°. Двигатель с неявнополюсным ротором имеет максимум момента при θ=-90°:
(4.6) Рисунок 4.2 - Угловая характеристика синхронного двигателя.
Максимальный момент зависит от размера воздушного зазора двигателя. Чем больше зазор, тем меньше xd и больше Мэм.max
Однако при большом зазоре растут габариты машины.
Предел статической устойчивости синхронного двигателя:
(4.7)Удельный синхронизирующий момент, как и в генераторном режиме, максимален при θ = 0 и равен нулю при θ = 90°.
Величина Мmах характеризует перегрузочную способность машины.
Кратность максимального момента определяется по формуле:
(4.8)Согласно ГОСТ 183-74 эта кратность должна быть не менее 1,65.
Зависимость M=f(θ), представляющая собой угловую характеристику синхронного двигателя, является его механической характеристикой. При номинальной нагрузке θном=20—30°.
Синхронный двигатель потребляет электрическую мощность P1 из сети. Часть этой мощности расходуется на электрические потери в обмотке статора Рэ1 и магнитные потери Рмв статоре, а остальная ее часть передается вращающимся магнитным полем от статора к ротору. Эта мощность называется электромагнитной.
Рисунок 4.3 - Преобразование мощности в синхронном двигателе
Электромагнитная мощность
Рэм преобразуется в механическую, развиваемую ротором. Частично мощность Рэм расходуется на покрытие механических Рмх и добавочных Рд потерь. Оставшаяся ее часть Р2 является полезной механической мощностью на валу двигателя.
U-образные характеристики для различных значений Р (или М) представлены на рисунке 4.4.
Рисунок 4.4 - U-образные характеристики синхронного двигателя при различных значениях нагрузки.
При перевозбуждении двигатель генерирует реактивную мощность непосредственно у потребителя, что способствует повышению cosφ сети. Это позволяет снизить реактивную мощность, вырабатываемую синхронными генераторами на электрических станциях, и уменьшить потери в линиях электропередач. Возможность генерировать реактивную мощность выгодно отличает синхронные двигатели от асинхронных, которые потребляют реактивную мощность для возбуждения. Поэтому синхронные двигатели проектируются для работы при номинальной мощности с перевозбуждением (с опережающим током) и cosφном=0,9. Работа с перевозбуждением предпочтительна также и для повышения максимального момента двигателя.
Отсюда следует, что при любых нагрузках на валу синхронные двигатели могут работать с различными значениями cosφ, в том числе и с cosφ=1. Достигается это изменением тока в обмотке возбуждения.
4.1 Пуск синхронного двигателя
Синхронный двигатель непосредственным включением обмотки статора (якоря) в сеть переменного тока не может быть запущен в ход.
Объясняется это следующим образом. При включении многофазной обмотки статора в сеть практически мгновенно образуется вращающееся магнитное поле, частота вращения которого n зависит от частоты f протекающего по обмоткам тока:
(4.9)Полюса этого поля, перемещаясь в пространстве, будут взаимодействовать то с одноименными, то с разноименными полюсами неподвижного, возбужденного ротора. В соответствии с этим будет меняться направление вращающего момента, действующего на ротор. В течение половины периода изменения тока в обмотках момент будет направлен в одну сторону, а в течение другой половины — в противоположную.
Пуск мог бы произойти, если бы ротор разогнался до установившейся скорости в течение полупериода, когда вращающий момент не меняет свой знак. При частоте 50 Гц полупериод равен 0,01 с. Из-за механической инерции за такое время роторы практически всех синхронных двигателей развернуться не смогут.
Существует несколько способов пуска двигателя. Эти способы заключаются в том, что в процессе пуска ротор двигателя разгоняется до скорости вращающегося поля, после чего двигатель входит в синхронизм и начинает работать как синхронный. Применение получили пуск с помощью разгонного двигателя, частотный пуск и асинхронный пуск. Наибольшее распространение имеет асинхронный пуск.
Пуск с помощью разгонного двигателя состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины разгоняется до номинальной скорости. Обмотка возбуждения включена в сеть постоянного тока, а обмотка статора разомкнута. Затем производят включение ее на параллельную работу с сетью. После подключения машины к сети разгонный двигатель механически отсоединяют от вала синхронной машины, и последняя переходит в двигательный режим. Мощность разгонного двигателя невелика и составляет 10—20% номинальной мощности синхронного двигателя. Эта мощность покрывает мощность механических и магнитных потерь в синхронном двигателе.
Частотный пуск
применяется в том случае, если синхронный двигатель подключен к автономному источнику, частоту напряжения которого можно изменять от нуля до номинальной. Если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться скорость магнитного поля. Ротор, следуя за полем, постепенно будет повышать свою скорость от нуля до номинальной. В процессе пуска машина все время работает в синхронном режиме.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого на роторе в полюсных наконечниках размещают пусковую обмотку. Эта обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет то же устройство, что и демпферная обмотка генератора. При пуске трехфазная обмотка статора включается в сеть. Ток, который будет протекать по этой обмотке, создаст вращающееся магнитное поле. Оно наведет в пусковой обмотке ротора ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем образуется момент, под действием которого ротор придет во вращение и разгонится до скорости, близкой к скорости поля ω1. Вращение его будет происходить со скольжением, которое зависит от нагрузки на валу (ω < ω1).
Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения за счет возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель. При пуске обмотка возбуждения не должна быть разомкнутой, так как в противоположном случае вследствие большого числа витков в ней вращающимся полем индуцировалась бы большая ЭДС, опасная не только для изоляции, но и для обслуживающего персонала. Обмотку возбуждения нельзя также замыкать накоротко, так как в этом случае она образует несимметричный (однофазный) контур. Он явится причиной образования дополнительного момента, под действием которого произойдет провал в кривой механической характеристики вблизи полусинхронной скорости.
Рисунок 4.5 - Механическая характеристика двигателя при асинхронном пуске с провалом вблизи полусинхронной скорости.
Из-за этого ротор при пуске может застрять на промежуточной скорости (в точке А на рисунке 4.5). В начале пуска обмотка возбуждения должна быть замкнута на резистор с сопротивлением, приблизительно в 10—15 раз большим, чем сопротивление самой обмотки
. По окончании пуска обмотка возбуждения включается в сеть постоянного тока.
Асинхронный пуск синхронного двигателя характеризуется значениями пускового тока Iп и вращающих моментов — начального пускового Мп и входного Мвх. Входным называется асинхронный момент при скорости ротора, равной 0,95ω1. Этот момент равен наибольшему нагрузочному моменту, при котором возможно вхождение двигателя в синхронизм при включении постоянного тока в обмотку возбуждения.
Рисунок 4.6 - Механическая характеристика двигателя при асинхронном пуске.
Если сеть, в которую включается синхронный двигатель, недостаточно мощна, то во избежание большого падения напряжения при асинхронном пуске применяют меры для снижения начального пускового тока: включение через автотрансформатор, реактор и т.д.
4.2 Рабочие характеристики.
Рабочие характеристики синхронного двигателя представляют собой зависимости тока статора Iа, электрической мощности P1, поступающей в обмотку статора, КПД и cosφ от отдаваемой механической мощности P2 при Uс=const, fс=const и Iв=const.
Рисунок 4.7 - Рабочие характеристики синхронного двигателя.
Часто эти характеристики строят в относительных единицах. Поскольку частота вращения синхронного двигателя постоянна, зависимость n2=f(Р2) обычно не приводится.
Зависимость P1=f(P2) имеет характер, близкий к линейному.
(4.10)Мощность Р2 является полезной мощностью синхронного двигателя:
(4.11)Полезный момент на валу синхронного двигателя:
(4.12)Ток двигателя при холостом ходе является практически реактивным. По мере роста нагрузки возрастает активная составляющая тока, в связи с чем зависимость тока