ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 274
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Монтаж двигателя в месте его установки осуществляется либо посредством лап 12, либо посредством фланца. В последнем случае на подшипниковом щите (обычно со стороны выступающего конца вала) делают фланец с отверстиями для крепления двигателя на рабочей машине. Для предохранения обслуживающего персонала от возможного поражения электрическим током двигатели снабжаются болтами заземления (не менее двух).
При питании обмотки статора асинхронной машины трехфазным током в магнитопроводе создается вращающееся магнитное поле. На замкнутые накоротко проводники ротора действуют электромагнитные силы. Суммарное усилие, приложенное ко всем проводникам ротора, образует электромагнитный момент, увлекающий ротор вслед за вращающимся полем. Если этот момент достаточно велик, то ротор приходит во вращение. Такой режим работы асинхронной машины называется двигательным.
Если ротор асинхронной машины разогнать с помощью внешнего момента до частоты вращения больше чем частота вращения магнитного поля, то изменится направление ЭДС в проводниках ротора и направление активной составляющей тока ротора, то есть машина перейдет в генераторный режим. При этом изменит свое направление и электромагнитный момент, который станет тормозящим.
2.2. Рабочие характеристики трехфазного асинхронного двигателя с короткозамкнутым ротором
Под рабочими характеристиками асинхронного двигателя (ГОСТ7217-79) понимают зависимость ряда величин:Р1, I1, S, сos., КПД от полезной мощности Р2., при условии неизменного приложенного напряжения U1 и его частоты f1.
Снятие рабочих характеристик следует производить при нагретых обмотках статора и ротора.
2.3. Построение круговой диаграммы
Круговая диаграмма позволяет определить величины, характеризующие работу асинхронной машины.
При изменении нагрузки асинхронной машины ее первичный и вторичный токи изменяются по величине и по фазе. При U1=const и f=const режим работы и величина нагрузки асинхронной машины однозначно определяются величиной ее скольжения s. При изменении скольжения в пределах от —∞ до +∞ конец вектора тока описывает непрерывную замкнутую кривую, которая называется геометрическим местом этого тока. При постоянных параметрах асинхронной машины геометрическим местом концов векторов тока является окружность, которая вместе с некоторыми другими построениями называется круговой диаграммой асинхронной машины.
Круговая диаграмма (рисунок 2.2) позволяет определить все электромагнитные величины, характеризующие режим работы машины при любом значении скольжения, и дает наглядное представление об изменении этих величин при изменении режима работы машины. Поэтому она имеет большое методическое значение. Кроме того, она имеет также существенное практическое значение для изучения режимов работы асинхронных машин в случаях, когда их параметры можно принять постоянными. Эта диаграмма называется точной, так как в ней учитывается величина модуля и аргумента поправочного коэффициента C1. Диаметр окружности такой диаграммы повернут на угол 2γ относительно горизонтали.
При изменении скольжения точка D на круговой диаграмме и концы векторов токов I1 и I2 скользят по окружности. Область диаграммы ODC соответствует двигательному, область ОАВ — генераторному и область СВ — тормозному режиму работы асинхронной машины.
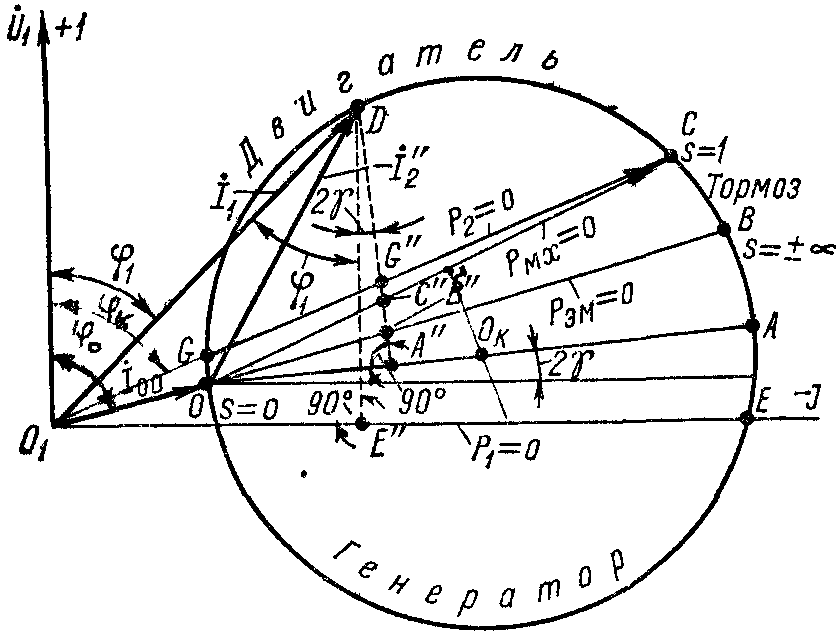
Рисунок 2.2 - Точная круговая диаграмма асинхронной машины
Как следует из изложенного, величина тока Iоо, диаметр Dк, угол γ и сопротивление С12(rк2 — r2'), определяющего положение на круговой диаграмме точки s=±∞, не зависят от величины r2'. Поэтому величина окружности тока, ее расположение и положение на ней точек s=0 и s=±∞ также не зависят от r2'. От величины r2' зависит лишь положение на круговой диаграмме точки s=1, причем эта точка с увеличением r2' смещается против часовой стрелки по направлению к точке s=0.
По данным опытов холостого хода и короткого замыкания для номинального напряжения строят круговую диаграмму для исследуемого двигателя.
Перед началом построения необходимо выбрать масштаб тока mi, который должен быть удобен для работы, для чего желательно, чтобы он был равен или кратен одному из ряда чисел:
mi=1; 2; 2,5; 5; 10 (А/мм) и так далее.
Вектор тока короткого замыкания Iк1 (отрезок О1С) в выбранном масштабе должен быть несколько меньше длины того листа бумаги, на котором производится построение диаграммы.
Масштаб мощности определяется по формуле:

, Вт/мм; (2.1)
Масштаб момента определяется по формуле:
 , Н·м/мм. (2.2)
, Н·м/мм. (2.2)Полюс диаграммы (точка О1 на рисунке) располагается в левом нижнем углу листа. Через полюс проводятся координатные оси: ось мнимых количеств О1Е – горизонтально и ось вещественных количеств, или направление вектора приложенного напряжения О1U1 – вертикально.
По данным опыта холостого хода из точки О1 в масштабе тока mi, проводят вектор тока холостого хода Iоo (отрезок О1О) под углом о к оси ординат. Из точки О, называемой точкой холостого хода, соответствующей скольжению s=0 , проводят прямую, параллельную оси абсцисс. Затем по данным опыта короткого замыкания в выбранном масштабе тока mi из точки О1 под углом к к оси ординат строят вектор тока короткого замыкания Iк ном. Эти токи соответствуют номинальному напряжению асинхронной машины. Соединив точки О и С, получим прямую ОС, являющуюся хордой искомой окружности. На полученной диаграмме линия ОС является линией механической мощности.
При холостом ходе сдвиг фаз между Е1 и I0 с большой точностью составляет 900.
Поэтому:
 или
или  . (2.3)
. (2.3)Эти соотношения позволяют определить направления диаметра 0А. Центр окружности Ок будет лежать в точке пересечения прямой ОА, с перпендикуляром, восстановленным из середины хорды ОС. После этого радиусом ОкО можно начертить окружность тока.
Линию электромагнитной мощности и электромагнитного момента (линия ОВ) проводят под углом δ к радиусу ООк окружности.
Угол
 между диаметром круговой диаграммы Dк (линией ОА) и линией электромагнитной мощности (линией ОВ) определяется равенством:
между диаметром круговой диаграммы Dк (линией ОА) и линией электромагнитной мощности (линией ОВ) определяется равенством: . (2.4)
. (2.4)Точку реального холостого хода G на круговой диаграмме получим, если из точки О отложим отрезок ОG:
 (2.5)
(2.5)Соединим точки G и С. Прямая GС будет линией полезной механической мощности. Горизонтальная прямая 01Е, является линией электрической мощности.
Определение рабочих характеристик по полученной диаграмме выполняют согласно методике, изложенной в дополнительной литературе.
2.4. Трехфазные асинхронные двигатели с фазным ротором
Устройство трехфазного асинхронного двигателя с фазным ротором представлено на рисунке 2.3.
Асинхронный двигатель с фазным ротором — конструктивно отличается от асинхронного двигателя с короткозамкнутым ротором главным образом устройством ротора. Статор этого двигателя состоит из корпуса 3 и сердечника 4 с трехфазной обмоткой. Сердечник собран в пакет из отштампованных тонких листов электротехнической стали толщиной 0,5 мм покрытых слоем изоляционного лака и скреплен специальными скобами или продольными сварными швами по наружной поверхности. Такая конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем.
На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора и лобовые части, находящимися за пределами сердечника по его торцовым сторонам. Асинхронный двигатель с фазным ротором имеет подшипниковые щиты 2 и 6 с подшипниками качения 1 и 7. К корпусу 3 прикреплены лапы 10 и коробка выводов 9.
В расточке статора расположена вращающаяся часть двигателя — ротор, состоящий из вала 8 и сердечника 5. Ротор имеет более сложную конструкцию. На валу 8 закреплен шихтованный сердечник 5 с трехфазной обмоткой, выполненной аналогично обмотке статора. Эту обмотку соединяют звездой, а ее концы присоединяют к трем контактным кольцам 11, расположенным на валу и изолированным друг от друга и от вала. Для осуществления электрического контакта с обмоткой вращающегося ротора на каждое контактное кольцо накладывают две щетки, располагаемые в щеткодержателях. Каждый щеткодержатель снабжен пружинами, обеспечивающими прижатие щеток к контактному кольцу с определенным усилием.
Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с короткозамкнутым ротором. На корпусе асинхронного двигателя прикреплена табличка, на которой указаны тип двигателя, завод-изготовитель, год выпуска и номинальные данные (полезная мощность, напряжение, ток, коэффициент мощности, частота вращения и КПД).
Охлаждение двигателя осуществляется методом обдува наружной поверхности корпуса. Поток воздуха создается центробежным вентилятором.
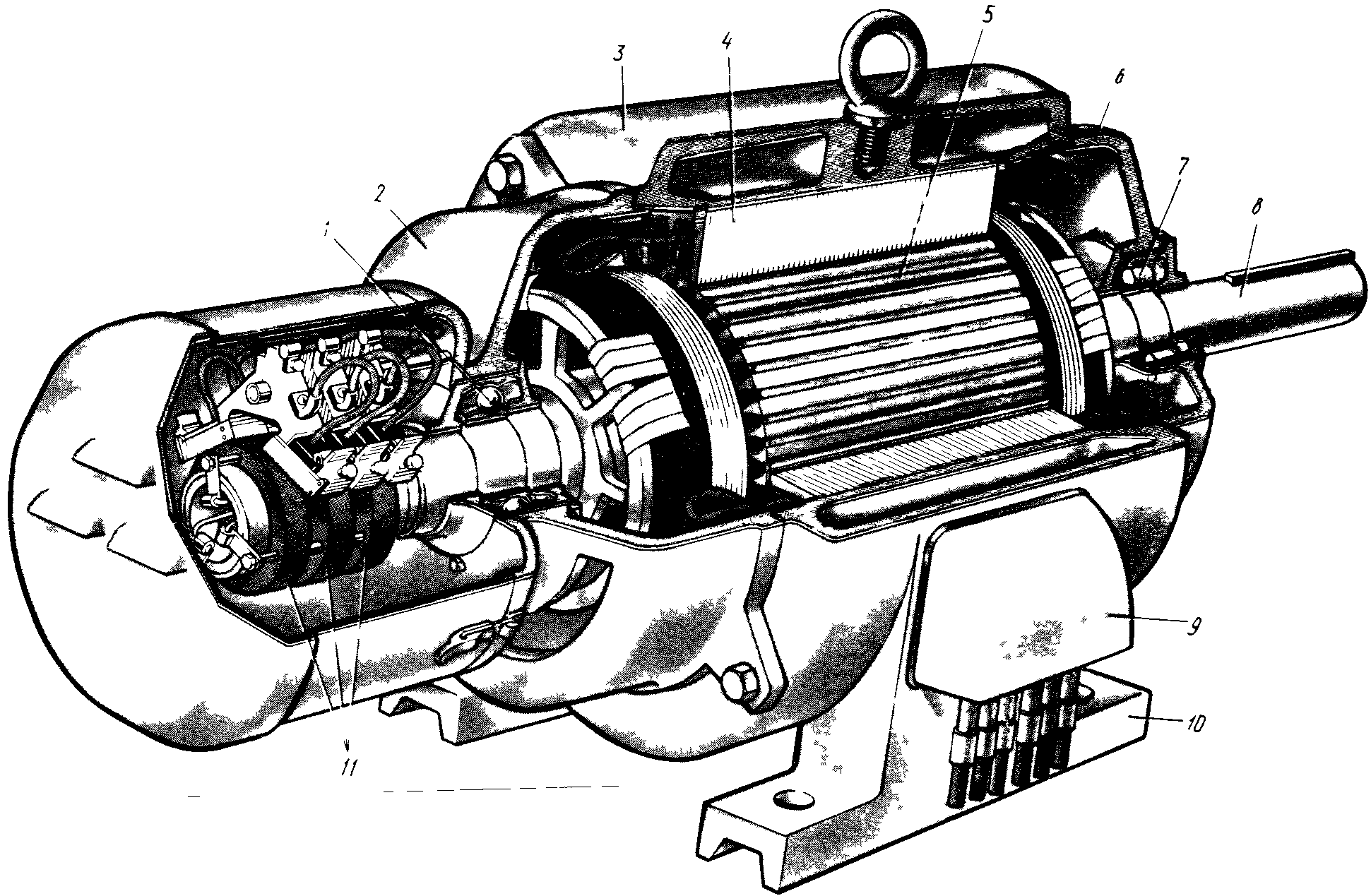
Рисунок 2.3 - Устройство трехфазного асинхронного двигателя с фазным ротором
Монтаж двигателя в месте его установки осуществляется либо посредством лап 10, либо посредством фланца. В последнем случае на подшипниковом щите (обычно со стороны выступающего конца вала) делают фланец с отверстиями для крепления двигателя к рабочей машине. Для предохранения обслуживающего персонала от возможного поражения электрическим током двигатели снабжаются болтами заземления (не менее двух).
2.4.1. Холостой ход
Опыт холостого хода даёт возможность изучить свойства магнитной цепи, определить возникающие при холостом ходе потери и чисто механические свойства АД при питании от источника регулируемого напряжения номинальной частоты. АД потребляет мощность, которая расходуется в основном на покрытие потерь в стали и механических потерь.
Для получения характеристики холостого хода производят несколько измерений при n=const, f=const и U1=var. При проведении опытов следует всегда повышать напряжение сверх номинального, чтобы проследить за характером изменения потерь в стали и намагничивающей силы при увеличении магнитного потока.
Наиболее важной частью характеристики холостого хода является кривая насыщения, называемая также кривой намагничивания или кривой холостого хода. Она показывает зависимость между током намагничивания (I0) и Э.Д.С. (Е0), при этом последняя почти всегда приравнивается к напряжению U0 на зажимах АД при холостом ходе. Так как падением напряжения на внутреннем активном и индуктивном сопротивлениях за счёт малой величины тока холостого хода можно пренебречь.
При cos
 холостого хода в пределах от 0,01 до 0,15 намагничивающий ток будет равен току холостого хода, при этом ошибка не превышает 1%.
холостого хода в пределах от 0,01 до 0,15 намагничивающий ток будет равен току холостого хода, при этом ошибка не превышает 1%.Для полной оценки АД необходимо знание потерь холостого хода, то есть механических потерь (Pмех) и потерь в стали (Pст) ненагруженного АД. Они определяются на холостом ходу мощностью (Р0) за вычетом потерь в обмотке статора (Pмеди). Так как (Pмеди) очень малы, ввиду малости I