ВУЗ: Новосибирский государственный технический университет
Категория: Лекция
Дисциплина: Основы теории управления
Добавлен: 15.02.2019
Просмотров: 2431
Скачиваний: 10

Основы теории управления
Лекция 11
Типовые регуляторы
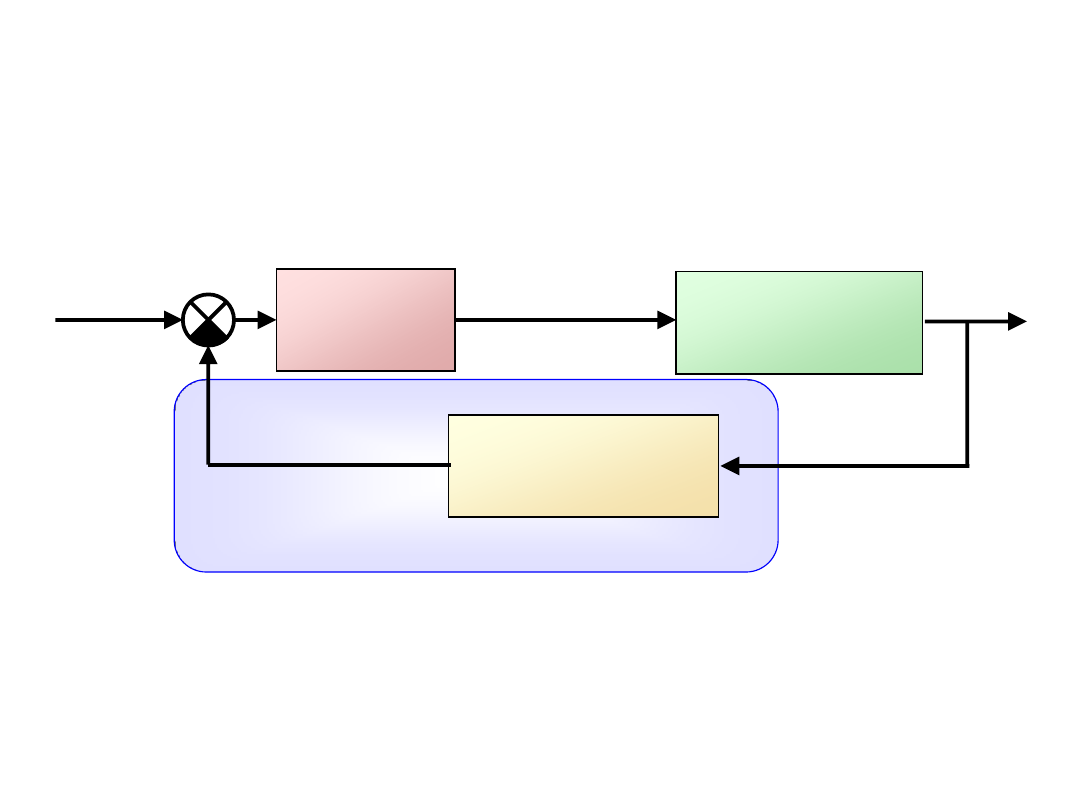
Управление по отклонению
принцип обратной связи (ОС)
Обратная связь
Регулятор
Управляемый
объект
Измерительное
устройство
Управление
Задание
y
Для регулирования, как правило, используют типовые регуляторы,
названия которых соответствуют названиям типовых звеньев
ε
u


Типовые регуляторы
1. П-регулятор, пропорциональный регулятор
Передаточная функция П-регулятора: W
п
(p) = K
1
.
Принцип действия заключается в том, что регулятор вырабатывает
управляющее воздействие на объект пропорционально величине
ошибки (чем больше ошибка
ε
,
тем больше управляющее воздействие u).
2. И-регулятор, интегрирующий регулятор
Передаточная функция И-регулятора: W
и
(p
) = К
0
/p.
Управляющее воздействие пропорционально интегралу от ошибки.
3. Д-регулятор, дифференцирующий регулятор
Передаточная функция Д-регулятора: W
д
(p
) = К
2
*p.
Д-регулятор генерирует управляющее воздействие только при изменении
регулируемой величины: u= K2 * dε/dt.
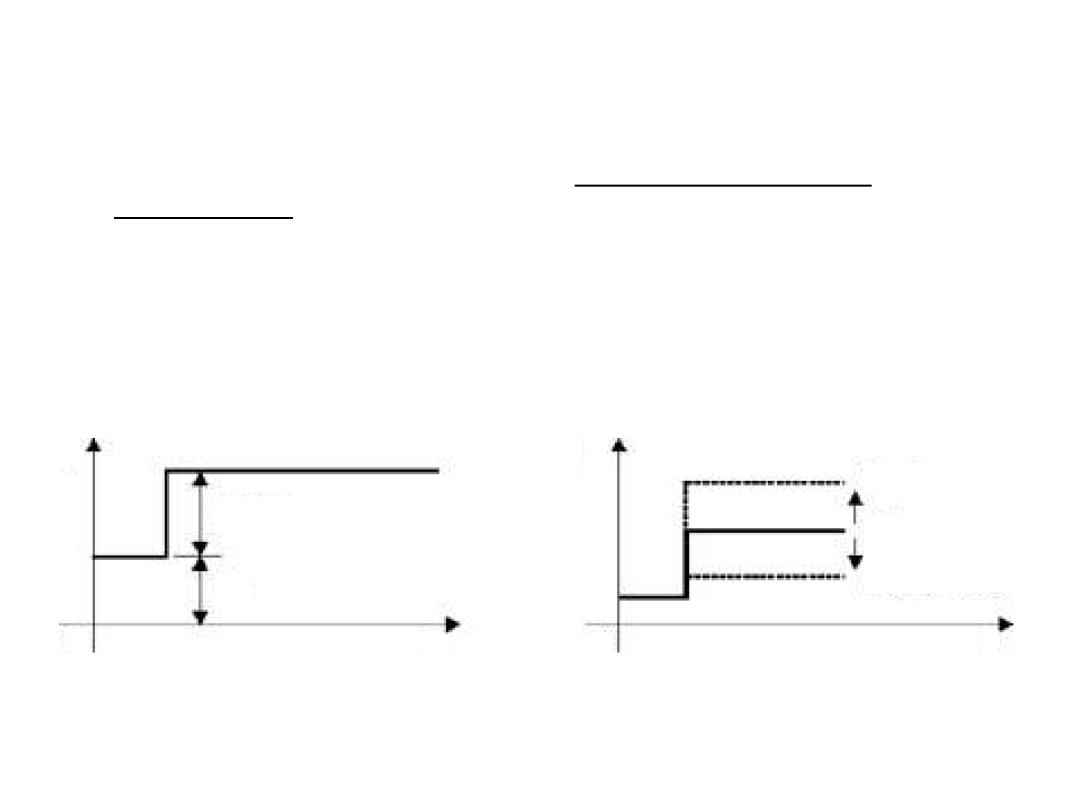
Пропорциональный регулятор
Параметрами П-регулятора являются коэффициент усиления К
1
и рабочая точка u
0
.
Рабочая точка u
0
определяется как значение выходного сигнала, при
котором рассогласование регулируемой величины равно нулю. При
влиянии возмущающих воздействий возникает, в зависимости от
u
0
,
отклонение регулирования.
u
0
u
u
t
t
0
0
K
1
*
ε
K
1
K
1
больше
K
1
меньше
П-регулятор. Реакция на единичное ступенчатое воздействие
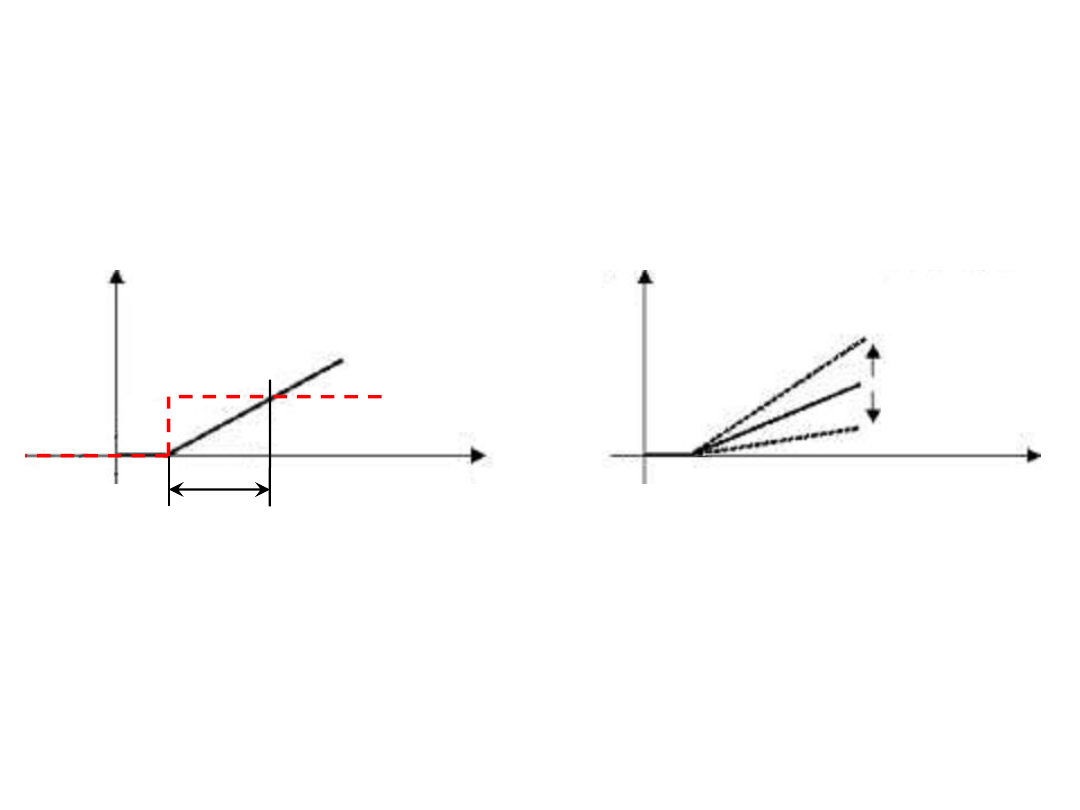
Интегрирующий регулятор
В отличие от П-регулятора у И-регулятора, благодаря интегральной
составляющей, исключается отклонение регулирования.
u
u
t
t
0
0
K
0
K
0
больше
K
0
меньше
И-регулятор. Реакция на единичное ступенчатое воздействие
Т
и
Т
и
– время, в течение которого с момента поступления на вход
регулятора постоянного сигнала сигнал на выходе регулятора достигнет
значения, равного значению входного сигнала.