ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.09.2024
Просмотров: 92
Скачиваний: 0
СОДЕРЖАНИЕ
Равноускоренное прямолинейное движение
3. Вращательное движение и его кинематические параметры. Связь между угловой и линейной скоростями.
4. Инерция. Инерциальные системы отсчета. 1-й закон Ньютона.
5. Взаимодействие тел. Сила. Принцип суперпозиции сил. Проявления взаимодействия тел. Сила
6. Законы динамики Ньютона. Второй закон Ньютона
Третий закон Ньютона. Обратная задача динамики
7. Сила упругости. Виды деформаций. Закон Гука.
8. Сила трения: скольжения, качения, покоя. Коэффициент трения.
9. Закон всемирного тяготения. Гравитационное поле. Невесомость
10. Импульс тела. Закон сохранения импульса. Реактивное движение.
11. Механическая энергия и ее виды. Закон сохранения энергии.
12. Механическая работа и мощность. Кпд.
13.Колебательное движение и его характеристики. Виды колебаний.
Колебательное движение и его характеристики
14. Свободные и вынужденные колебания. Резонанс и его учет в технике.
15. Механические волны. Виды волн. Длина волны.
Скорость распространения волны
16. Звуковые волны. Ультразвук и его использование в технике и медицине.
|
|
4. Инерция. Инерциальные системы отсчета. 1-й закон Ньютона.
Движение тел в разных системах отсчета происходит по-разному. Первый закон Ньютона утверждает, что существуют такие системы отсчета, где материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока остается изолированной. Система отсчета, в которой материальная точка движется в отсутствие воздействия других тел по инерции, называется инерциальной системой отсчета.
Как показывают наблюдения, такой системой для большинства задач может считаться система, центр которой связан с центром Земли, а оси направлены на удаленные звезды (геоцентрическая система отсчета). В этой системе отсчета звезды, удаленные друг от друга на большие расстояния, т.е. не взаимодействующие друг с другом, неподвижны.
Любая система, движущаяся относительно инерциальной системы отсчета с постоянной скоростью, также является инерциальной. В системе отсчета, связанной с поверхностью Земли, только Полярная звезда неподвижна, а остальные звезды за сутки совершают движение по окружности. Однако для большинства задач, в которых рассматриваются движения, протекающие за время много меньше 24 ч, и эту систему отсчета можно считать инерциальной. В ряде задач точность расчетов не позволяет и геоцентрическую систему отсчета считать инерциальной, поэтому приходится начало системы отсчета выбирать в центре Солнца.
5. Взаимодействие тел. Сила. Принцип суперпозиции сил. Проявления взаимодействия тел. Сила
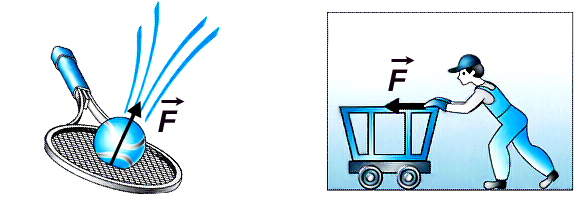
Рис. 1
Воздействие одного тела на другое проявляется в изменении формы каждого из них (деформация) или характера движения, например, в изменении направления или модуля вектора скорости (рис. 1).
Воздействие тел друг на друга в физике характеризуется силой. Сила – количественная мера воздействия одного тела на другое. Проявление воздействия меняется в зависимости от значения силы, направления ее действия и точки приложения, поэтому сила – векторная величина. Воздействие на рассматриваемое тело других тел изображается векторами, число которых равно числу воздействующих тел. Одно тело – одна сила, следовательно, и один вектор.
В механике рассматривают одну бесконтактную дальнодействующую силу – силу всемирного тяготения, которая может действовать на рассматриваемое тело на большом расстоянии (например, Земля притягивает Луну), и две контактные силы:силу упругостиисилу реакции. В таблице показаны примеры изображения этих сил.
|
Графическое изображение сил |
Направление и точка приложения |
|
|
Сила тяжестинаправлена к центру Земли, приложена к центру тяжести тела |
|
|
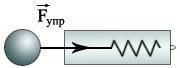
Сила упругостинаправлена вдоль нити, стержня или пружины. Сила приложена в точке контакта. В случае стержня может быть направлена произвольно |
|
|
Сила реакции:в общем случае направление не определено. Сила приложена в точке соприкосновения тел |

В СИ сила выражается в ньютонах. Сила, равная 1 H, сообщает эталонному телу массой 1 кг ускорение 1 м/с2.
Однако эталоном воздействия одного тела на другое могли бы служить, например, деформация стандартной пружины или изменение скорости стандартного тела.
|
|
Равнодействующаянескольких сил – сила, эквивалентная данной системе сил, т.е. сила, вызывающая такое же механическое воздействие на рассматриваемое тело, что и система сил.
Равнодействующая сила равна векторной сумме всех сил, приложенных к материальной точке. Это еще раз подчеркивает, что сила – векторная величина.
Если в инерциальной системе отсчета тело покоится, то это значит, что действие сил, приложенных к телу, скомпенсировано, или равнодействующая этих сил равна нулю.
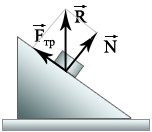
Рис. 2
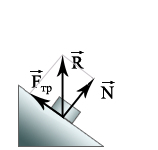
Принцип суперпозиции сил констатирует, что другие тела действуют на данное тело независимо друг от друга, присутствие одного тела никак не влияет на действие другого.
Принцип
суперпозиции сил позволяет когда это
удобно, рассматривать одну силу как
сумму нескольких сил, называемых
составляющими данной силы. Так, силу
реакции![]() чаще
всего рассматривают как сумму нормальной
составляющей силы реакции поверхности
чаще
всего рассматривают как сумму нормальной
составляющей силы реакции поверхности![]() и
силы трения
и
силы трения![]() (рис.
2)
(рис.
2)
6. Законы динамики Ньютона. Второй закон Ньютона
Если
в инерциальной системе отсчета на
материальную точку массой mоказывается
воздействие со стороны других тел,
характеризуемое равнодействующей силой![]() ,
то эта материальная точка движется
ускоренно. Направление ускорения
,
то эта материальная точка движется
ускоренно. Направление ускорения![]() совпадает
с направлением равнодействующей силы
совпадает
с направлением равнодействующей силы![]() ,
а модуль ускорения равен отношению
модуля силы к массе материальной точки:
,
а модуль ускорения равен отношению
модуля силы к массе материальной точки:
![]() .
.
Коэффициент пропорциональности mявляется скалярной положительной величиной, характеризующей способность тела реагировать на воздействие других тел (инертность тела), поэтому называетсяинертной массойматериальной точки. Он не зависит ни от положения этой точки относительно воздействующих тел, ни от ее скорости, ни от значения и направления действующей силы, или от ее природы.
Третий закон Ньютона. Обратная задача динамики
Каждая
пара тел взаимодействует так, что сила
воздействия одного тела на другое равна
по модулю и направлена противоположно
силе воздействия второго тела на первое,
причем обе силы лежат на одной прямой.
Если камень притягивается Землей силой
![]() ,
то Земля притягивается камнем силой
,
то Земля притягивается камнем силой![]() ,
причем
,
причем![]() =
–
=
–![]() и эти силы приложены к разным телам.
Если тело давит на подставку вертикально
вниз силой
и эти силы приложены к разным телам.
Если тело давит на подставку вертикально
вниз силой![]() ,
называемой весом тела, то подставка
действует на тело вертикально вверх
силой
,
называемой весом тела, то подставка
действует на тело вертикально вверх
силой![]() ,
равной весу тела по модулю и противоположно
направленной. Точки приложения этих
сил также находятся на разных телах
(рис. 4).
,
равной весу тела по модулю и противоположно
направленной. Точки приложения этих
сил также находятся на разных телах
(рис. 4).
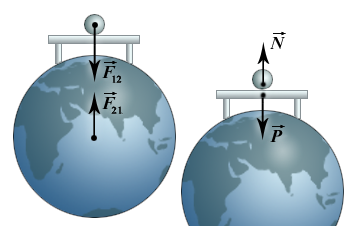
Рис. 4
Если в условии задачи фигурируют ускорения, а требуется найти силы, то мы имеем дело с обратной задачей динамики. Приведенный выше план решения прямой задачи динамики годится и для этого случая. Полученная система уравнений будет просто содержать другие неизвестные в виде проекций искомых сил при известных ускорениях.