ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.05.2019
Просмотров: 2454
Скачиваний: 34
Из уравнений (7.43) и (7.45) следует
>/2
А = ' У ' / 2-
(7.46)
Подставим математическою зависимость (7.46) в уравнение (7.44):
у/2 Ля7 ,
Л - У ,
„
Т - г .
(7 47)
^
Г Г
Г Г
После преобразования уравнения (7.47)
2 + У2 К ^ 2
2
Г Г
(7.48)
Подставим зависимость (7.48) в зависимость (7.38):
' ■ 4 # -
I [одставим зависимость (7.48) в зависимость (7.41):
2
2
( ’
у
- 4 - ( З
л
/ 2 - 4
(7.50)
Таким образом, при выполнении условий (7.46), (7.48), (7.49) и (7.50)
I" нукторный электропривод по каналу управления имеет:
эталонную передаточную функцию четвёртого порядка
^ « ( р ) = Ю Т 2 7 т
2
/2
1
’
( 7 5 1 )
ч пленную переходную характеристику
67

з т (л/2 + 1 ) ^ - 0 0 8 ( 7 2 + 1 ) ^
т
_
2 + л/2 С . 1
(
----------- 51П— нсоз— \-е
2
1
Т
Т
-К 2'+1)7
т
и
- эталонную амплитудную частотную характеристику
1
с е
/17_12
л
/2^7,80 ?; + 1
64
о,. ....
(7.52)
(7.53)
68
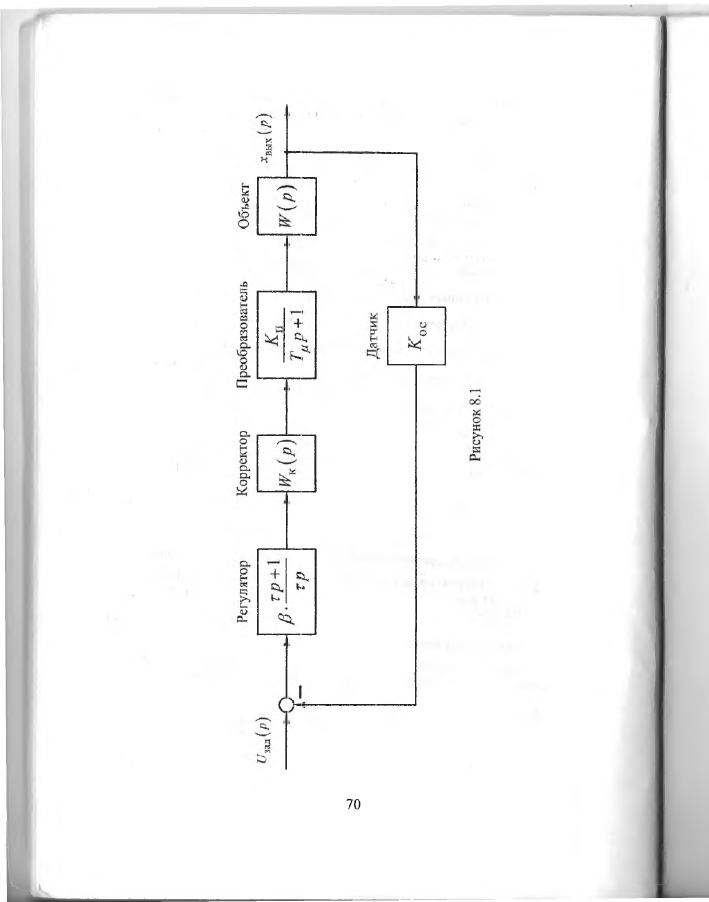
Н а рисунке 8.1 приведена структурная схема системы автоматиче
ского регулирования выходной координаты инерционного объекта.
Н а рисунке 8.1 имею тся следую щие обозначения:
где (7зад
- задаю щ ее напряжение системы автоматического регулиро
вания выходной координаты инерционного объекта;
хвых
~ выходная координата инерционного объекта;
Р
- динамический коэффициент усиления регулятора;
т
- постоянная времени регу лятора;
К п
- коэффициент усиления преобразователя;
1\х
- некомпенсируемая постоянная времени преобразователя;
К ос
- коэфф ициент обратной связи;
И'и ( р ) - передаточная функция корректора;
Н
р
)
передаточная функция инерционного объекта.
Исли инерционный объект первого порядка, то его передаточная
функция имеет вид
№ ( р ) - -
г * - ,
( 8 - 1 )
Т\р+\
I Ц| д
коэффициент инерционного объекта;
/ 1
постоянная времени инерционного объекта первого порядка.
11ри этом корректор долж ен иметь передаточную функцию:
» ж( р ) ш № ± 1 ,
(8.2)
цр
+ 1
I
постоянная времени корректора.
1
1
и системы автоматического регулирования вы ходной координаты
и
11
|
>11
н
11
м н< >го (>бъекта первого порядка справедливо уравнение
I , ,
/ ч
„
, ч-| п тр + \ Ц р + 1
К п
8 Синтез схемы автоматического регулирования выходной
координаты инерционного объекта первого порядка
70
I
Если выбрать постоянную времени регулирования.равную
г = Тм,
'
(8.4)
то передаточная функция системы автоматического регулирования выход
ной координаты инерционного объекта первого порядка принимает вид
■Л
р
).
1
^ з а д (р )
1
1
_1_
/ ккпк
01
1
' тмт\Р +
1
-■Тмр + 1
(8.5)
Р ккпкос
Из сопоставления эталонной передаточной ф ункции второго порядка
(4.1) и передаточной функции системы автоматического регулирования
выходной координаты инерционного объекта первого порядка (8.5) полу
чаем систему уравнений:
1
Р ККПК0с
1
1
•V
1
г
2
.
2 м ’
■Т = Т
(
8
.
6
)
/ / К К ПК 0С
11з системы уравнений (8.6) следует:
// =
:
ккпкос
'-т„.
(8.7)
1
ч '/ г
4.
Ган им образом, система автоматического регулирования выходной
•
1
>нишим инерционного объекта первого порядка имеет:
на ионную передаточную функцию второго порядка
"■<(/>)
V
Т Г 7 1
;
( 0 )
ос
р
2
+тмР+\
• иную переходную характеристику
г 1
МО
1 -
51П----- НСОЗ —
т
т
Г !
(8.9)
•
т у ю амплитудную частотную характеристику/
I
1