Добавлен: 21.10.2018
Просмотров: 1915
Скачиваний: 4
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
6/28
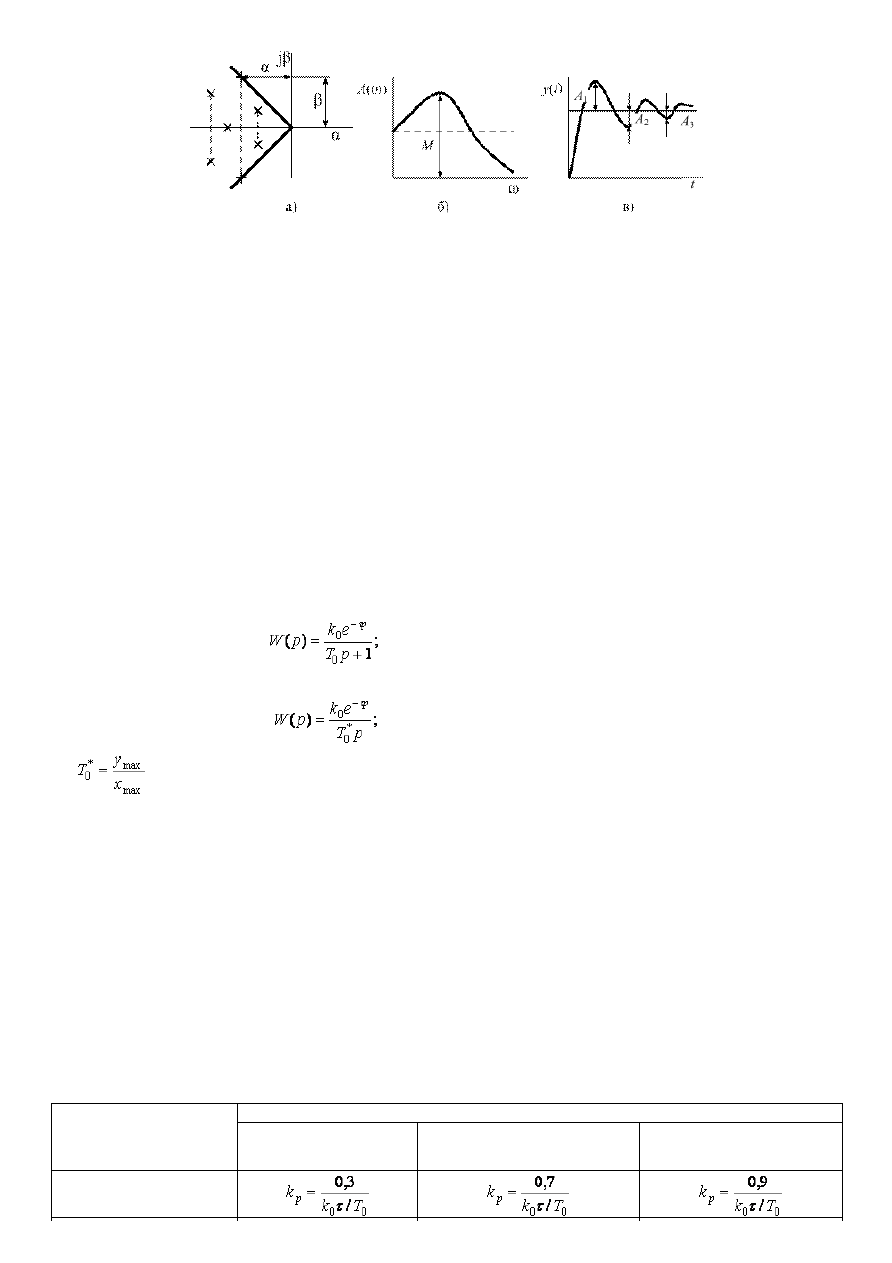
Рис. 3. Определение количественных мер запаса устойчивости АСР:
а, б — по степени колебательности; в — по степени затухания
Показатели т, М обычно применяются в расчетах, а показа тель Ψ — при экспериментальных
оценках запаса устойчивости.
При выборе типа регулятора предполагают, что в системе су ществует определенный переходный
процесс:
·
апериодический без перерегулирования, который используется в случаях, когда требуется
исключить влияние регулирующего воздействия данной системы на другие переменные сложного объекта;
·
с 20%-ным перерегулированием, при котором обеспечивается малое время переходного процесса и
первого полупериода;
·
с минимальной интегральной квадратичной оценкой, при кото рой обеспечиваются наименьшие
значения суммарного динамиче ского отклонения.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и
параметрами, а также предполагае мым видом переходного процесса, выбирается тип и настройки
линейных регуляторов.
Для статических объектов управления
(6)
для астатических объектов управления
(7)
где
— условная постоянная времени астатического объекта.
Основные области применения линейных регуляторов характе ризуются следующим образом:
И-регулятор применяется со статическим объектом при мед ленных изменениях возмущений и с
малым временем запаздыва ния τ/T
0
< 0,1;
П-регулятор применяют со статическим и астатическим объек тами при любой инерционности и
времени запаздывания, опреде ляемым соотношением τ/T
0
≤ 0,3;
ПИ-регулятор применяется при любой инерционности объекта и времени запаздывания,
определяемым условием τ/T
0
≤ 1.
В табл. 2 приведены формулы выбора настроек k
p
, Т
и
, Т
д
основных регуляторов для статических
объектов.
Таблица 2.
Формулы выбора настроек регуляторов для статических объектов
Применяемый регулятор
Предполагаемый переходный процесс
апериодический
20%-ное перерегу лирование
минимум интеграль ной
квадратичной оценки
П-регулятор
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
7/28
ПИ-регулятор
ПИД-регулятор
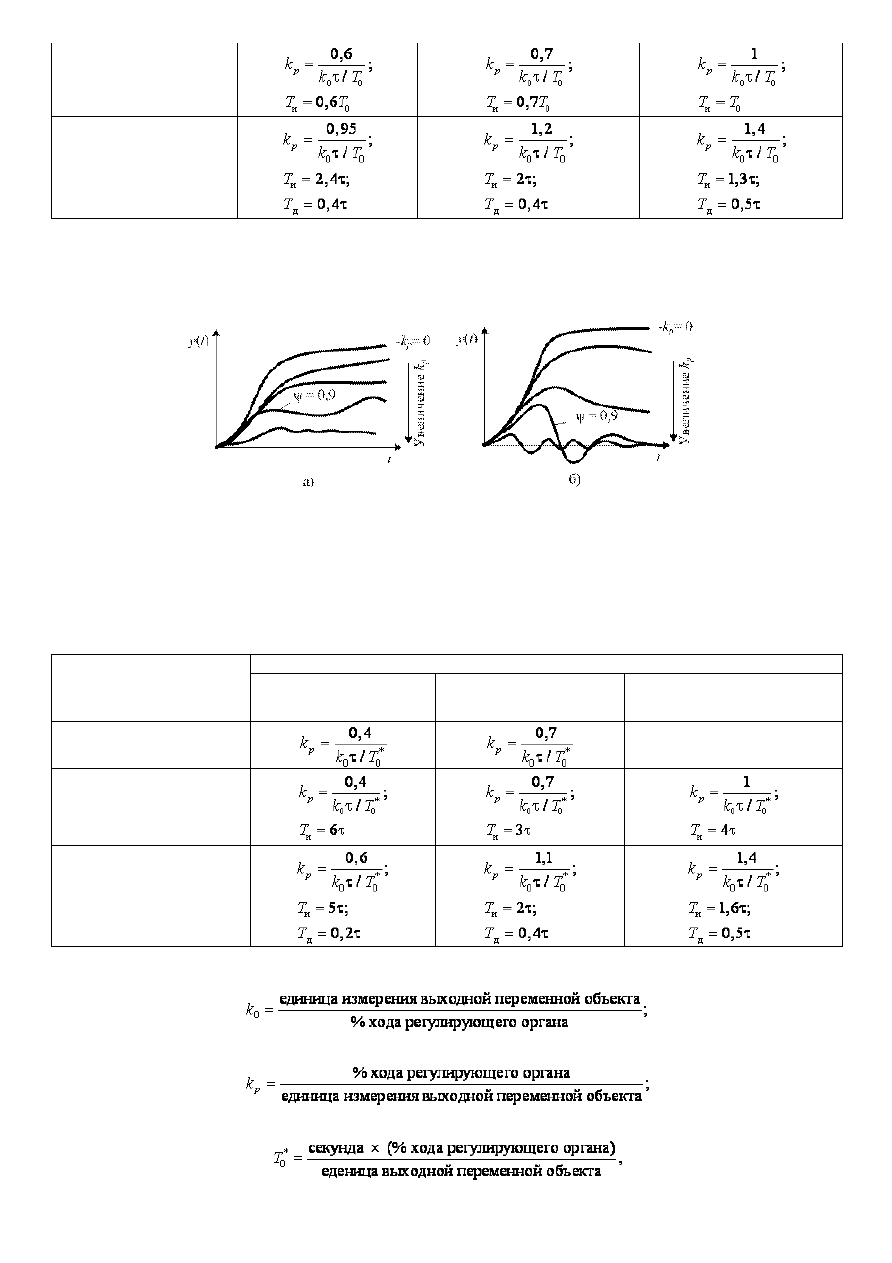
Графики переходных процессов в АСР с П- и ПИ-регуляторами приведены на рис. 4, а, б. При
увеличении k
p
уменьшаются отклонения, но увеличивается колебательность.
Рис. 4. Графики переходных про цессов в АСР с П-регулированием (а) и с ПИ-регулированием (б) при различных
значениях k
р
В табл. 3 приведены формулы выбора настроек k
p
, Т
и
, Т
д
основных регуляторов для астатических
объектов.
Таблица 3.
Формулы выбора настроек регуляторов для астатических объектов
Применяемый регулятор
Предполагаемый переходный процесс
апериодический
20%-ное перерегу лирование
минимум интеграль ной
квадратичной оценки
П-регулятор
‑
ПИ-регулятор
ПИД-регулятор
В указанных таблицах параметры объектов и регуляторов име ют следующие размерности:
Т
0
и τ измеряются в секундах, условная постоянная времени аста тического объекта
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
8/28
Время удвоения интег ральной части регулятора Т
и
и время предварения дифференциальной части ре
гулятора Т
д
измеряются в секундах.
Рассчитанные по приве денным формулам значения параметров настройки регу лятора вследствие
упроще ний при определении пара метров объектов могут отли чаться от значений, обеспе чивающих
требуемое каче ство регулирования. В про цессе наладки и эксплуатации AСP с типовыми регуляторами
параметры настройки уточня ются экспериментально.
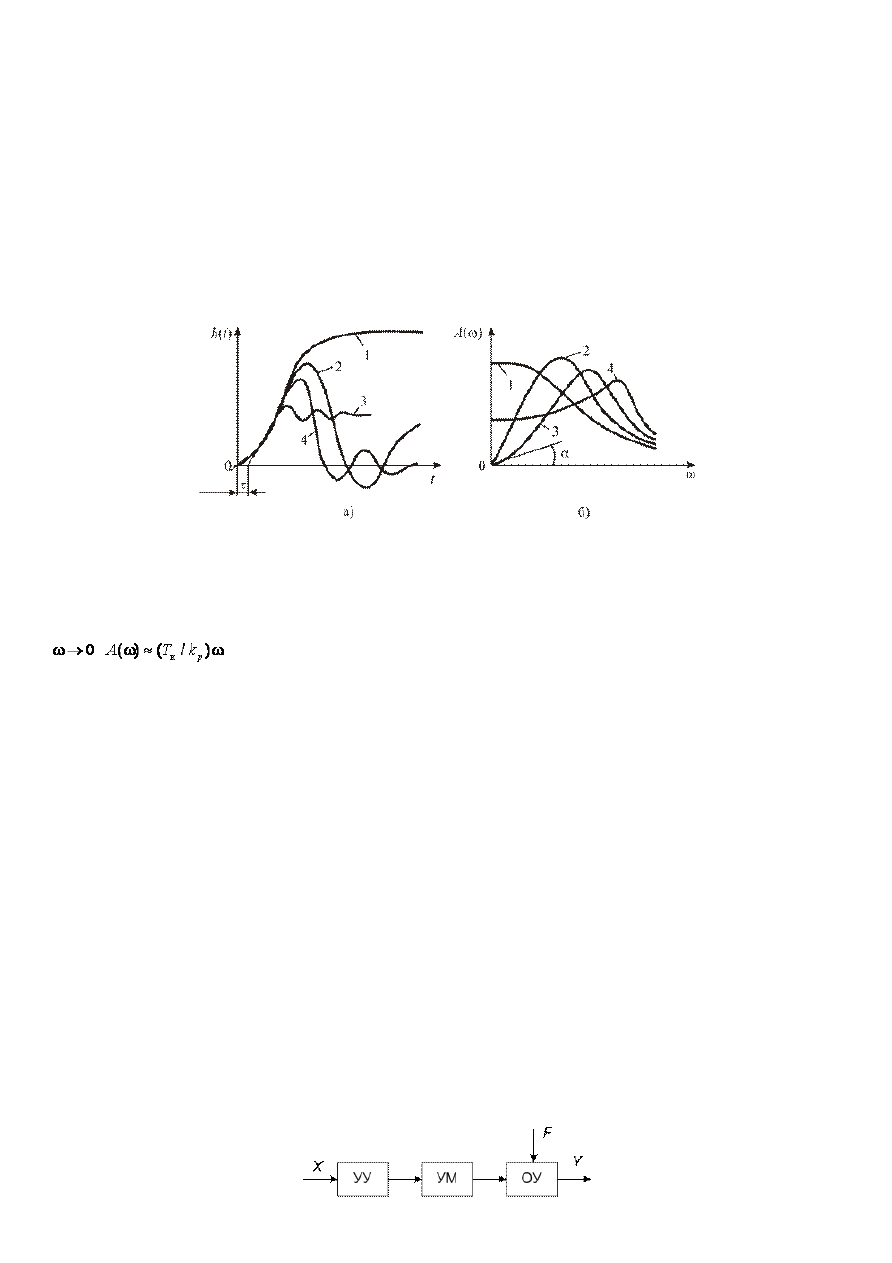
Качество регулирования в одноконтурной АСР для стационар ных объектов с типовыми регуляторами
характеризуется времен ными и амплитудно-частотными характеристиками (рис. 5). Пе реходные процессы
объекта и АСР совпадают на начальном уча стке на интервале около 2τ (рис. 5, а). Это объясняется тем, что
эффект воздействия регулятора начинает сказываться на выходе объекта с запаздыванием τ. Соответственно
эффективность регу лирования на высоких частотах также близка к нулю (рис. 5, б).
Рис. 5
. Качество регулирования в одноконтурных АСР для стационарных объектов с типовыми регуляторами: а — по
временным характеристикам; б — по амплитудно-частотным характеристикам; 1 — без регулятора; 2 — с И-
регулятором; 3 — с П-регулятором; 4 — с ПИ-регулятором; tg α
= Т
и
/k
р
.
Высокая эффективность регулирования достигается на низких ча стотах, и в частности для АСР с ПИ-
регулятором эффективность пропорционально соотношению параметров Т
и
/k
р
так как при
Для нестационарных объектов с изменяющимися динамически ми свойствами выбор параметров
настройки регуляторов такой же, однако для улучшения качества регулирования целесообразно вводить
устройства автоподстройки параметров регулятора при изменении динамических характеристик объекта.
3. Проектирование исполнительных механизмов
3.1. Принципы управления исполнительными системами
Для выполнения машинного технологического цикла (процесса) требуется согласование работы всех
механизмов и выходных устройств, включая исполнительные, контролирующие и управляющие. Естественно,
что в основе управления машинами лежат принципы механики, увязывающие их силовые, энергетические и
массовые характеристики.
В общем представлении системы автоматического управления (САУ) движением в современных
машинах могут быть построены с использованием следующих принципов:
1) управление по разомкнутому циклу;
2) управление по замкнутому циклу;
3) комбинированное управление.
Автоматическое управление с разомкнутой цепью воздействий характеризуется функциями управления,
которые не зависят от действительного хода (протекания) технологического процесса и выполняются по
разомкнутому циклу для получения определенного конечного результата (рис. 6.).
Рис. 6. Управление по разомкнутому циклу (жесткое управление)
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
9/28
Управление (Х) от оператора через управляющее устройство (УУ), усилитель мощности (УМ)
воздействует на объект управления (ОУ). F — возмущающее воздействие, возникающее в результате
взаимодействия САУ с внешней средой и вызывающее непланируемые изменения выходных координат. Y —
предписанное значение выходной координаты, определяемое требуемым режимом работы.
К автоматическому управлению с разомкнутой цепью воздействий также относятся САУ по возмущению
(рис. 7)
Рис. 7. Управление по возмущению
Сигнал датчика, измеряющего возмущение F, преобразуется в регулирующее воздействие на объекте
управления ОУ. Поскольку природа возмущений F может быть различная, то регулирование по такой схеме
затруднено и осуществляется только по основным возмущениям.
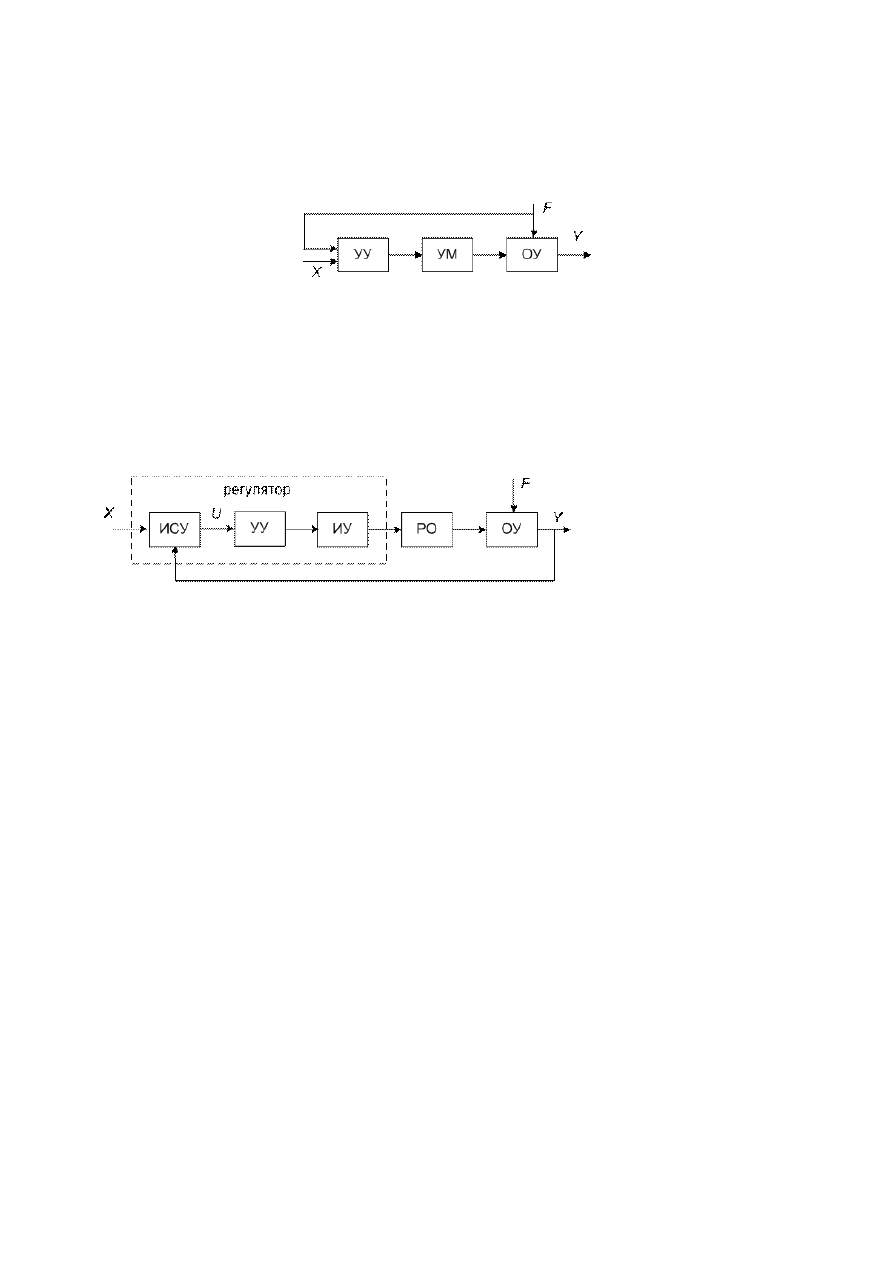
Управление по замкнутому циклу (рис. 8) характеризуется тем, что значение требуемых показателей
какого-либо процесса поддерживается за счет подачи на управляющее устройство УУ сигналов с учетом
фактического протекания процесса путем введения обратных связей.
Рис. 8. Управление по замкнутому циклу
Замкнутая система включает ОУ (машину, агрегат), регулирующий орган (РО), непосредственно
осуществляющий изменение регулируемой величины в ОУ. Регулятор включает: измерительно-сравнивающее
устройство ИСУ, измеряющее текущее значение регулируемой величины Y и вырабатывающее сигнал
рассогласования U = X
- Y; управляющее устройство УУ, усиливающее и преобразующее по необходимому
закону сигнал U; исполнительное устройство ИУ, выдающее (осуществляющее) регулирующее воздействие на
регулирующий орган РО.
Рассмотренная схема управления действует по принципу отклонения, в которой влияние возмущения
ослабляется, но не устраняется.
В современных машинах широко используются системы программного управления, формирующие
входные сигналы для программного движения машины.
При динамическом анализе и синтезе машин следует учитывать и свойства систем управления
движением, образующих с выходными звеньями двигателя и механизмом машины единую систему. С точки
зрения конструктивного исполнения могут выполняться с последовательным соединением передаточного и
исполнительного механизмов, параллельным соединением нескольких исполнительных механизмов (ИМ).
С учетом изложенного представить функциональную схему системы с управлением на входе
исполнительного двигателя ИД можно в виде, как показано на рис. 9. Программный сигнал X подается на
суммирующий узел А, где формируется сигнал управления U, определяемый как U
= X - DU.
Значение выходной координаты Y (или ее производной по времени) сравнивается с ее программным
значением Yп (или). Сигнал ошибки y
= Y - Yп подается на вход отрицательной обратной связи, которая
преобразует его в сигнал
-DU. В зависимости от характера задания программного закона движения Yп(t)
различают системы стабилизации скорости ((t)
= const), системы контурного управления, когда Yп(t) —
заданная функция времени, и системы позиционирования (Yп(t)
= const).
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
10/28
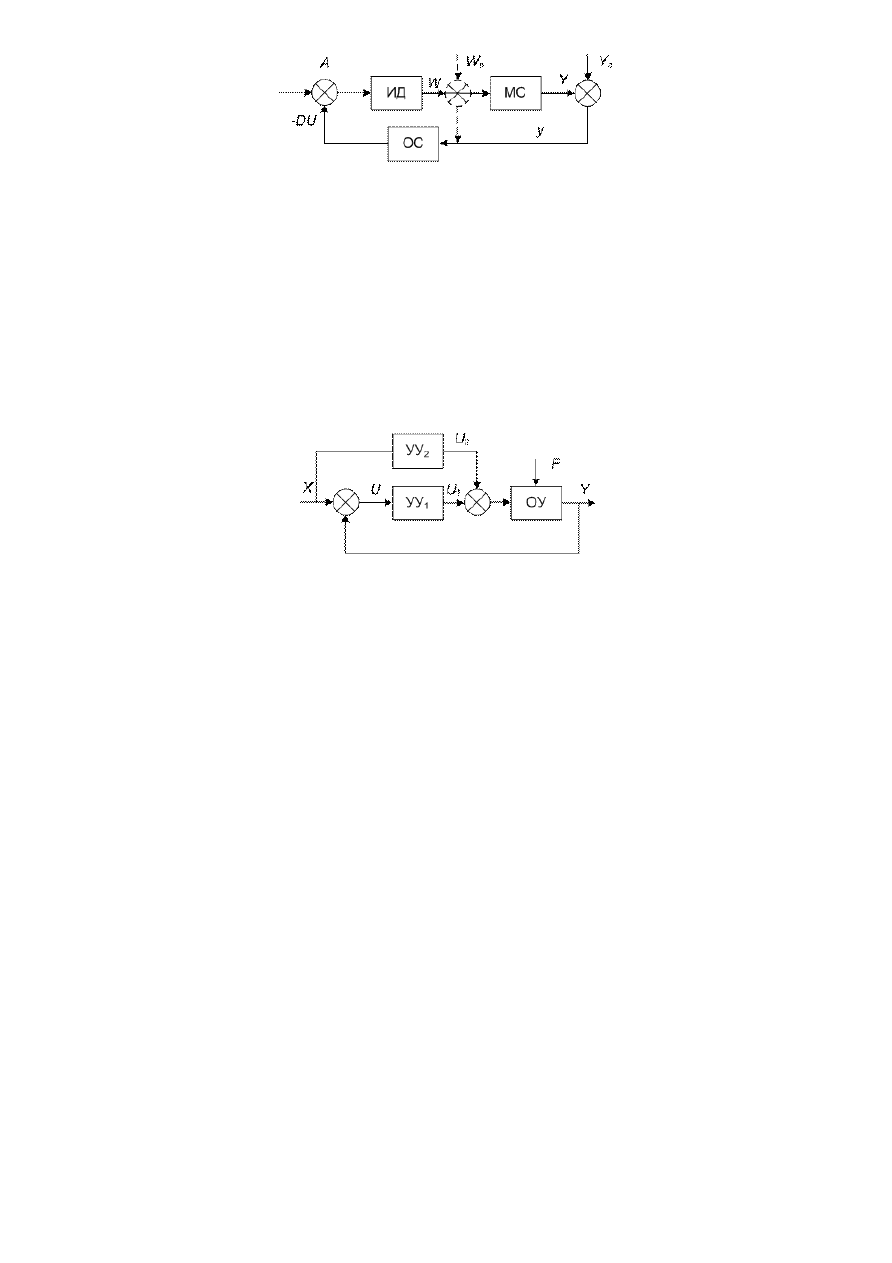
Рис. 9. Управление на входе исполнительного двигателя
Обратная связь может охватывать (пунктиром) только исполнительный двигатель ИД, тогда сигнал
DU
= W - W
П
пропорционален разности фактической W и программно заданной скорости W
П
вращения вала
двигателя. В приведенной схеме управления решается задача стабилизации скорости, т.е. поддержание
скорости в условиях меняющихся нагрузок. Контурное управление осуществляется с помощью следящих
систем, отрабатывающих задаваемое программное движение Yп(t) путем сравнения с ним реального
движения.
На рис. 10. приведена функциональная схема следящей системы, построенная по принципу
комбинированного управления. Здесь регулируемая величина Y управляемого объекта ОУ изменяется по
заданному на входе системы закону X(t) под влиянием управляющего воздействия U.
Рис. 10. Функциональная схема следящей системы с комбинированным управлением
В этой схеме, кроме устройства управления УУ
1
, имеет место дополнительное управляющее устройство
УУ
2
, через которое вводится непосредственно на управляемый объект ОУ воздействие функции X(t), заданной
на входе системы. Таким образом, управляющее воздействие складывается из двух составляющих: U
1
,
зависящей от рассогласования DU
= X - Y, и U
2
, определяемой изменением заданного закона сигнала Х.
Устройство управления УУ
2
предназначено для улучшения качества системы, построенной по принципу
отклонения, и является дополнительной связью в системе.
В системах позиционирования (см. рис. 8) выходное звено исполнительного двигателя ИД или рабочий
орган ОУ (МС) выводится в заданное положение с выполнением дополнительного требования по обеспечению
быстродействия и точности при подходе к точке позиционирования. В настоящее время широкое
распространение для позиционного и контурного управлений движением получили исполнительные
устройства (ИУ) с замкнутым по положению (следящим) приводом. В зависимости от установки датчика
положения (ДП) различают полузамкнутые и замкнутые исполнительные устройства (ИУ). В полузамкнутых
ИУ датчик положения устанавливается на валу двигателя, в замкнутом — на исполнительном механизме. Для
повышения качества управления зачастую проводится дополнительная обработка сигналов в цепях управления
как адаптация, оптимизация и фильтрация. Однако при всех видах преобразования сигналов в цепях
управления действительное изменение характеристик движения машины, отдельных узлов может быть
осуществлено за счет приложения к ним механических воздействий, соизмеримых с действующими
возмущениями. Для компенсации возмущающих сил необходимо прикладывать управляющие воздействия
максимально близко к точкам возмущения, минуя главный привод. При этом главный привод получает лишь
сигналы программного управления, а управляющие воздействия цепи обратной связи прикладываются с
помощью дополнительных устройств, действующих на исполнительные звенья, подвергающиеся
возмущениям. Такое техническое решение придает системе управления функции активной разгружающей
системы. На указанном принципе построены системы с силовым, кинематическим управлением. В системе с
силовым управлением обратная связь по сигналу ошибки (рис. 11) формирует обобщенную силу U