Добавлен: 23.10.2018
Просмотров: 7320
Скачиваний: 22
144
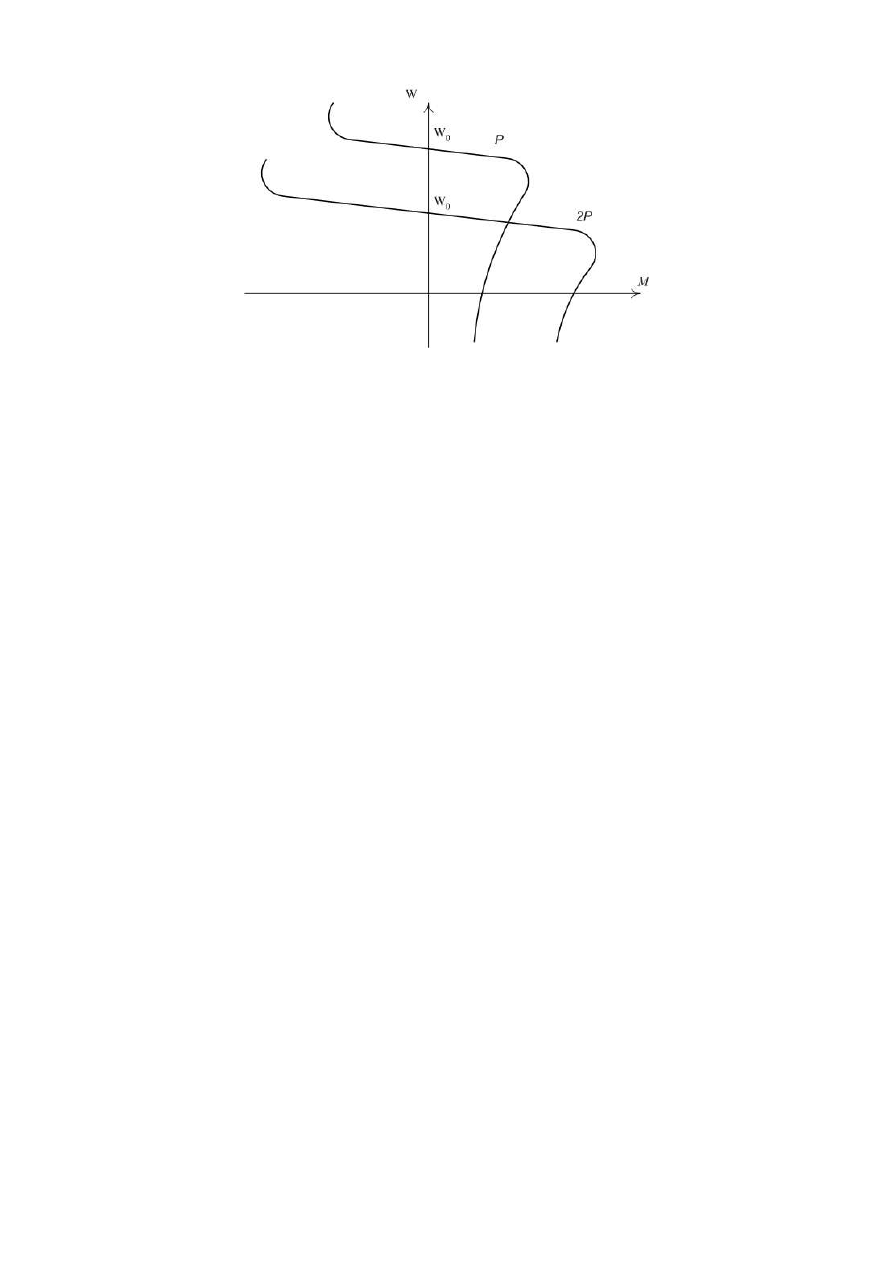
Рисунок 7.10 - Механические характеристики асинхронного
двигателя при изменении числа пар полюсов
Частотное регулирование скорости асинхронного двигателя
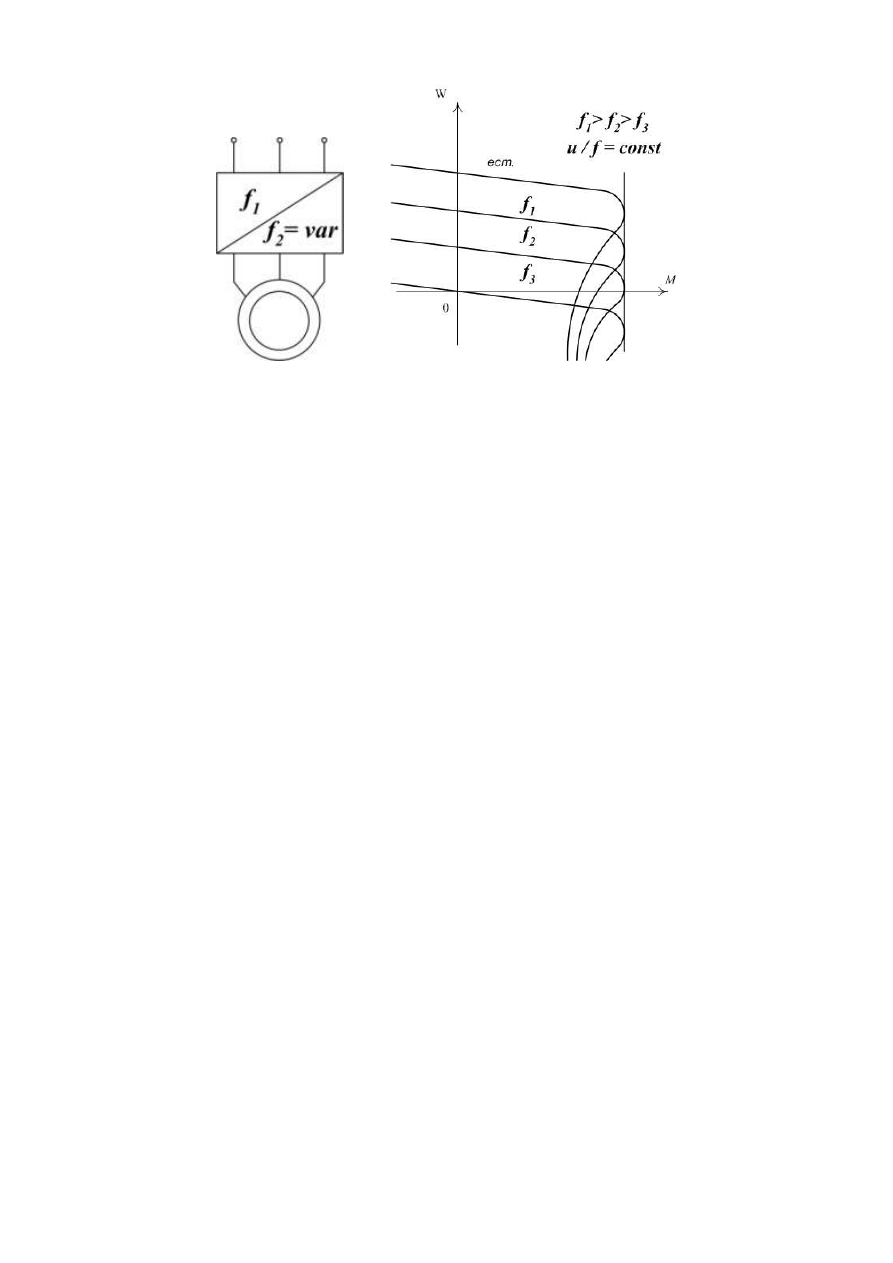
При частотном регулировании статор асинхронного двигателя питается от
преобразователя частоты, обеспечивающего плавное изменение частоты и ам-
плитуды выходного напряжения (рисунок 7.11, а). В последнее время наиболее
широкое распространение получили преобразователи частоты со звеном посто-
янного тока, в которых переменное напряжение сначала выпрямляется с помо-
щью неуправляемого выпрямителя, а затем с помощью трехфазного инвертора
на мощных транзисторах преобразуется в трехфазное с регулируемой частотой
и амплитудой. При частотном регулировании в общем случае для сохранения
значения магнитного потока машины постоянным необходимо поддерживать
соотношение
const
f
/
U
1
. В этом случае механические характеристики асин-
хронного двигателя имеют вид, показанный на рисунке 7.11, б.
Кроме этих способов регулирования для двигателей с фазным ротором
возможно реостатное регулирование частоты вращения. Этот метод основан на
изменении скольжения асинхронного двигателя при введении дополнительного
сопротивления в фазу ротора. Достаточно подробно этот способ рассматривал-
ся при изучении реостатного пуска. Недостатками реостатного регулирования
являются низкая точность регулирования, так как регулирование ступенчатое, и
большие потери на дополнительном сопротивлении ротора, что приводит к
ухудшению энергетических характеристик привода.
145
а) б)
Рисунок 7.11 - Схема регулирования (а) и механические
характеристики (б) асинхронного двигателя при
частотном регулировании
Способы торможения асинхронного двигателя
Для асинхронных двигателей возможны три режима торможения: рекупе-
ративное торможение, динамическое торможение и торможение противовклю-
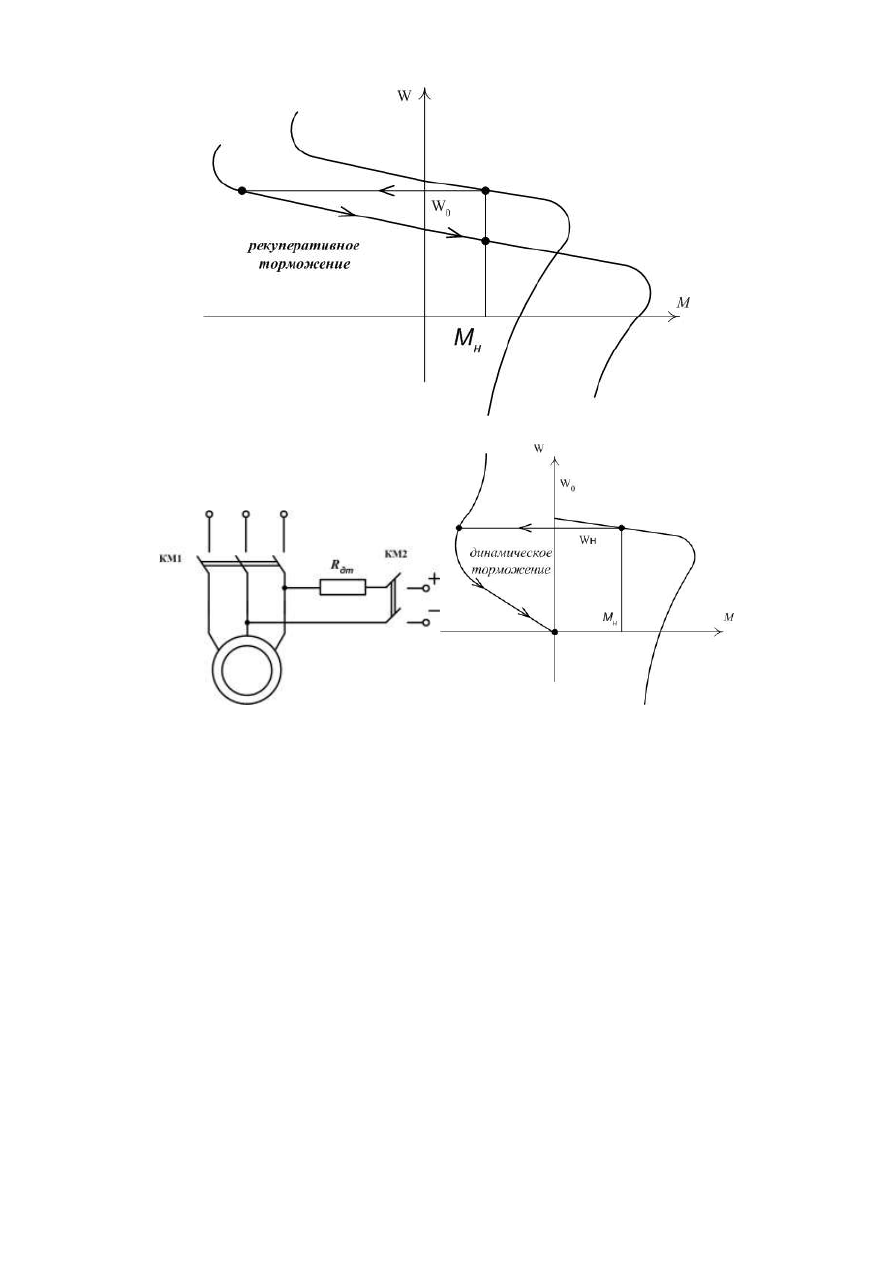
чением. Рекуперативное торможение происходит при увеличении частоты вра-
щения ротора выше синхронной частоты вращения поля. Направление пересе-
чения магнитных линий проводниками обмотки ротора при этом меняется на
противоположное. Изменяется направление токов в проводниках ротора и на-
правление электромагнитного момента, двигатель начинает работать в режиме
генератора преобразуя механическую энергию в электрическую и отдавая ее в
сеть. Увеличение частоты вращения выше синхронной возможно в электропри-
водах с регулируемой скоростью при переходе на пониженную частоту враще-
ния, как это показано на рисунке .12.
Динамическое торможение асинхронного двигателя осуществляется по
схеме, приведенной на рисунке 7.13, а. Статор двигателя отключают от сети и
подключают к источнику постоянного напряжения, ток которого создает маг-
нитное поле машины при торможении. Для ограничения тока динамического
торможения служит сопротивление
ДТ
R
. Механические характеристики асин-
хронного двигателя при динамическом торможении показаны на рисунке 7.13,
б.
146
Рисунок 7.12 - Рекуперативное торможение асинхронного двигателя
а) б)
Рисунок 7.13 - Схема (а) и механические характеристики(б)
асинхронного двигателя при динамическом торможении
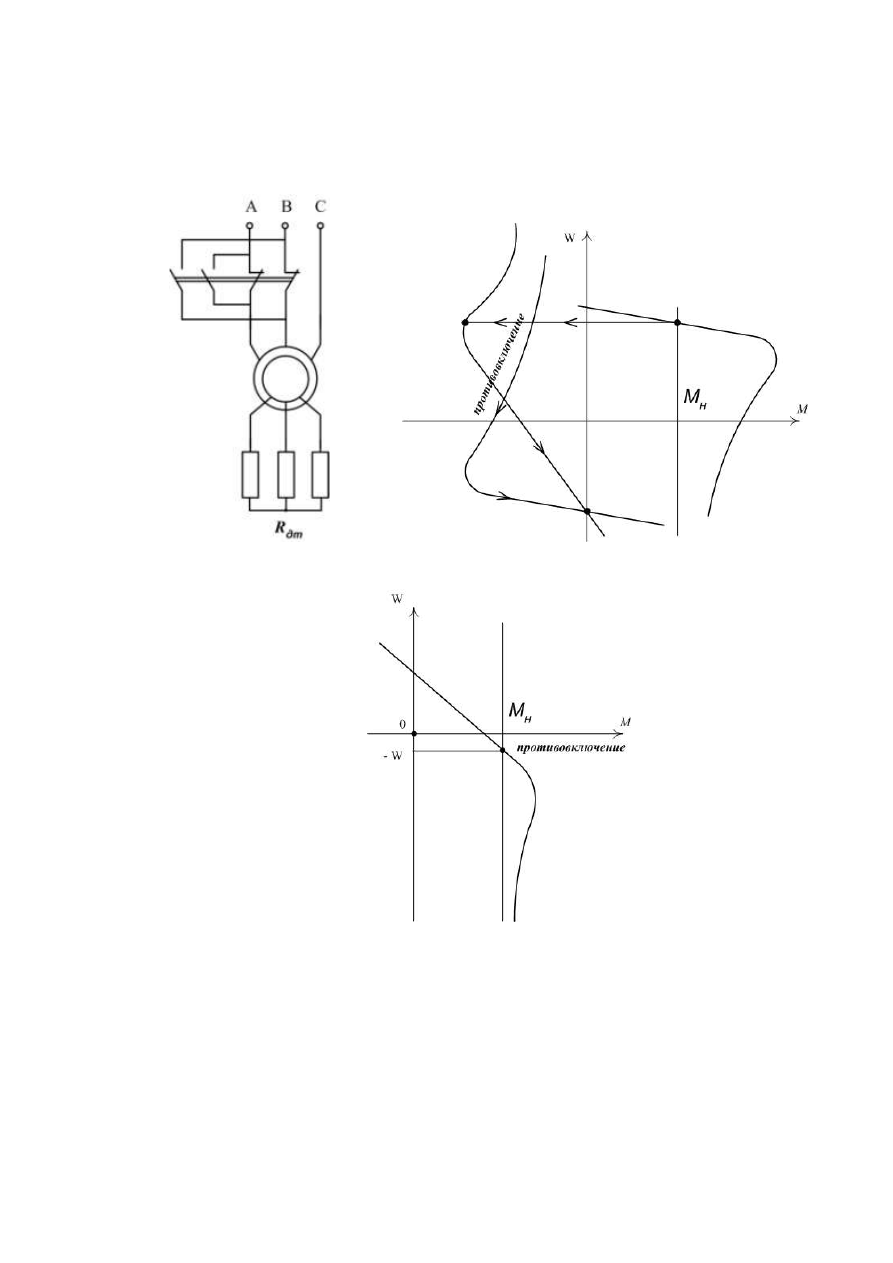
Торможение противовключением осуществляется реверсирование поля
статора (изменение направления вращения) за счет изменения порядка чередо-
вания фаз питающей сети (рисунок 6=7.14, а). При этом ротор продолжает вра-
щаться в направлении противоположном направлению вращения поля, создавая
при этом тормозной момент (рисунок 7.14, б). Ток статора в этом режиме на-
много превышает номинальный, поэтому для его ограничения необходимо вво-
дить в цепь ротора добавочное сопротивление. Такая возможность есть только
у двигателей с фазным ротором. Поэтому применение способа торможения
противовключением ограничено. Кроме реверса поля, торможение противовк-
лючением может быть достигнуто за счет введения большого добавочного со-
противления в цепь ротора, таким образом, что электромагнитный момент
147
асинхронного двигателя становится равным моменту сопротивления только при
скольжении больше единицы (
< 0). Этот режим применяется в электроприво-
де кранов и лебедок при спуске груза (рисунок 7.14, в).
а) б)
в)
Рисунок 7.14 - Схема (а), механические характеристики (б) и применение (в)
при торможении асинхронного электродвигателя в режиме противовключения
7.2 Выполнение лабораторной работы в программе Matlab
7.2.1 Описание лабораторной установки
148
Работа проводится в среде визуального моделирования MATLAB по вари-
антам. В данной лабораторной работе используются библиотеки:
1) Simulink, со следующими разделами:
а) Sinks;
б) Source.
2) SimPowerSystems, со следующими разделами:
а) Electrical Source;
б) Machine;
в) Measurement;
г) Extra Library.
Блоки разделов соединены по схеме, представленной на рисунке 7.17.
7.2.2 Порядок выполнения работы
Выбрать асинхронный двигатель из таблицы Е.2 приложения E, согласно
варианту, данные о двигателе занести в лабораторный журнал.
Определить параметры асинхронного двигателя перед выполнением лабо-
раторной работы на имитационной модели в пакете Simulink.
Расчет параметров схемы замещения асинхронной машины осуществляет-
ся по паспортным данным, представленные в таблицах приложения А.
1) Номинальное скольжение
s
H
s
n
n
n
n
s
,
где
S
n
-синхронная скорость (скорость вращения магнитного поля),
H
n
-
номинальная скорость вращения двигателя.
2) Критическое скольжение
n
k
k
k
s
m
m
s
1
2
,
где
H
макс
макс
к
M
M
m
m
- отношение момента короткого замыкания к номиналь-
ному моменту.
3) Конструктивный коэффициент
m
ls
L
L
c
1
1
.
Первоначально конструктивный коэффициент задается в диапазоне
с
1
=1.02-1.05 для предварительного расчета параметров схемы замещения. По-
сле расчета индуктивностей, входящих в уравнение 3 необходимо сравнить по-
лученное значение с первоначально выбранным и уточнить расчет. Обычно за
две, три итерации удается достичь совпадение принятого и рассчитанного кон-
структивного коэффициента.