ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.07.2020
Просмотров: 1285
Скачиваний: 6
СОДЕРЖАНИЕ
1.1 Описание работы роботизированного технологического комплекса
1.2 Выбор компоновки ПР по условиям точности и быстродействия
ПР и построенные на их основе роботизированные комплексы
являются перспективным средством комплексной автоматизации
производственных процессов. Применение роботов позволяет существенно
повысить производительность труда, эффективность действующего и
проектируемого оборудования, а также избавить человека от монотонных,
физически тяжелых и вредных для здоровья работ.
Использование роботов для замены рабочих на выполнении низко
квалифицированных, тяжелый операций – одна из возможностей перевода
3.2 Энергетический и кинематический расчет привода каретки
Требуемая мощность электродвигателя для привода:
![]() ,
Вт, (2.0)
,
Вт, (2.0)
где
![]() - общий КПД привода от двигателя до
реечной шестерни;
- общий КПД привода от двигателя до
реечной шестерни;
![]() –
мощность на рабочем
органе каретки, Вт;
–
мощность на рабочем
органе каретки, Вт;
![]() ,
,
где цп – КПД цилиндрической передачи;
под.к – КПД пары подшипников качения;
n – степень, равная числу пар подшипников качения;
![]() (2.1)
(2.1)
где ![]() – окружная скорость шестерни, м/с;
– окружная скорость шестерни, м/с;
![]() –
усилие на реечной
шестерне, H;
–
усилие на реечной
шестерне, H;
Принимаем
конструктивно окружную скорость шестерни
![]() м/с,
м/с,
![]() (2.2)
(2.2)
где ![]() –
масса груза, кг
–
масса груза, кг
![]() –
масса каретки,
кг
–
масса каретки,
кг
![]() кг
кг
где ![]() – общая масса робота (без устройства
ЧПУ)
– общая масса робота (без устройства
ЧПУ)
![]() – масса всех
швеллеров, из которых сварена рама
– масса всех
швеллеров, из которых сварена рама
a – ускорение каретки, м/с2
Принимаем
конструктивно ускорение каретки
![]() 2 м/с2
2 м/с2
![]() – сила трения, H
– сила трения, H
![]() (2.3)
(2.3)
где ![]() – предельный коэффициент трения качения
в подшипниках, для шариковых подшипников
– предельный коэффициент трения качения
в подшипниках, для шариковых подшипников
![]() ,
,
![]() – диаметр цапф,
– диаметр цапф,
![]() – усилие на
– усилие на
![]() каток, H
каток, H
![]() – диаметр катка,
– диаметр катка,
μ – коэффициент
трения качения, для выпуклого колеса
![]()
![]()
Принимаем
конструктивно диаметр цапф
![]() мм.
мм.
Принимаем
конструктивно диаметр катка
![]() мм.
мм.
Подставляем полученные значения величин в формулу (2.3):
![]()
Значение полученной силы применяем в выражении (2.2):
![]()
Так как мы имеем два однотипных электрогидравлических шаговых привода, можно предположить что привод каретки состоит из двух равных частей, следовательно, нагрузка будет распределяться поровну между двумя приводами:
![]()
Подставляем полученное значение силы в выражение (2.1):
![]() Вт
Вт
Находим мощность двигателя по формуле (2.0):
![]()
Используем передаточные числа передач, указанные в документации:
![]() ,
,
![]()
Частота вращения реечной шестерни
![]() мин-1,
мин-1,
где D – делительный диаметр реечной шестерни.
Ориентировочная частота на входном валу привода
![]() мин-1
мин-1
По результатам полученной мощности и частоты вращения принимаем электрогидравлический шаговый двигатель Э32-Г18-22(тип ШД5Д1МУ3)
Передаточное число каретки(окончательное):
![]()
Частота вращения валов привода:
![]()
![]()
![]()
где n1, n2, n3 – частота вращения соответствующих валов привода.
Угловые скорости на валах привода:
![]() ,
с-1, (2.4)
,
с-1, (2.4)

С учетом потерь мощности в звеньях:
![]()
Мощности на валах привода:

где N1, N2, N3 - мощности на валах каретки.
Крутящие моменты:
![]() ,
Вт, (2.5)
,
Вт, (2.5)
![]() =
=
![]() Н∙м
Н∙м
![]() =
=![]() Н∙м
Н∙м
![]() =
=![]() Н∙м
Н∙м
3.3 Расчет цилиндрической зубчатой передачи

Рисунок 11 – Эскиз цилиндрической зубчатой передачи
3.3.1 Расчёт шестерни и колеса I-ой ступени
Выбор материала.
Для шестерни и для колеса принимаем рекомендуемые марки сталей.
Принимаем для шестерни Сталь45 со следующими механическими свойствами:
Предел прочности: В=780 МПа
Предел текучести: Т=540 МПа
Твердость: 250НВ
Принимаем для колеса Сталь45 со следующими механическими свойствами:
Предел прочности: В=600 МПа
Предел текучести: Т=320 МПа
Твердость: 200НВ.
Расчет допускаемых контактных напряжений.
Предел контактной выносливости для шестерни при базовом числе циклов
Hlimb1 = 2HB + 70 = 570
Предел контактной выносливости для колеса при базовом числе циклов
Hlimb2 = 2HB + 70 = 470
Коэффициент долговечности KHL:
![]() (2.6)
(2.6)
где
![]() -
можно определить по формуле:
-
можно определить по формуле:
![]() (2.7)
(2.7)
![]()
![]()
![]() (2.8)
(2.8)
![]()
![]()
Подставляем полученные значения в выражение (2.6)
![]()
![]()
Принимаем KHL= 1
[SH] = 1,1 - коэффициент безопасности
Допускаемое контактное напряжение:
![]() (2.9)
(2.9)
Допускаемое контактное напряжение для шестерни:
![]() =
518
МПа
=
518
МПа
Допускаемое контактное напряжение для колеса:
![]() =
427
МПа
=
427
МПа
Расчетное контактное допускаемое напряжение:
![]() =
425,25
МПа
=
425,25
МПа
Допускаемые напряжения при расчете зубьев на контактную изгибную прочность:
![]() (3.0)
(3.0)
Пределы выносливости зубьев
Flim b1 = 1,75∙HB1 = 1,75∙250 = 437,5 МПа
Flim b2 = 1,75∙HB2 = 1,75∙200 = 350 МПа
SF=1,4 –коэффициент безопасности,
KFC=1,0 при нереверсивной передаче;
Коэффициент долговечности
![]() (3.1)
(3.1)
Принимаем KFL= 1.
![]() МПа
МПа
![]() МПа
МПа
Определение параметров передачи:
Ka = 495 - коэффициент для стальных прямозубых колес
KH = 1,0 – коэффициент неравномерности распределения нагрузки.
ba = 0,45 - коэффициент ширины колеса
![]() 0,45
0,45
Межосевое расстояние aw:
 (3.2)
(3.2)
 мм.
мм.
по ГОСТ 2185-66 принимаем aw = 100 мм.
Определяем нормальный модуль mn:
Принимаем по ГОСТ 2185-66 mn=2,0 мм
Находим суммарное количество зубьев zΣ:
![]() (3.3)
(3.3)
![]()
Число зубьев шестерни
![]()
принимаем z1=25
Количество зубьев колеса z2:
![]()
принимаем z2=75
Фактическое передаточное число
![]() (3.4)
(3.4)
![]() .
.
Определяем основные размеры шестерни и колеса.
Делительный диаметр шестерни:
![]() (3.5)
(3.5)
![]() мм
мм
Диаметр вершин зубьев шестерни:
![]() (3.6)
(3.6)
![]() мм
мм
Диаметр впадин зубьев колеса:
![]() (3.7)
(3.7)
![]() мм
мм
Делительный диаметр колеса:
![]() (3.8)
(3.8)
![]() мм
мм
Диаметр вершин зубьев колеса:
![]() (3.9)
(3.9)
![]() мм
мм
Диаметр впадин зубьев колеса:
![]() (4.0)
(4.0)
![]() мм
мм
Определяем ширину венца зубчатых колес:
![]() (4.1)
(4.1)
![]() мм
- ширина колеса
мм
- ширина колеса
примем b1 = b2 + 2…5 = 50 мм - ширина шестерни
Определение окружной скорости зубчатых колёс передачи:
![]() (4.2)
(4.2)
![]() м/с
м/с
Проверка контактных напряжений.
![]() ,
(4.3)
,
(4.3)
где KH = 1,0 - коэффициент нагрузки для симметричного расположения колеса при HB 350, bd = 0,63;
KH = 1,2 – коэффициент, учитывающий неравномерность распределения нагрузки;
KHv = 1,03 – при HB 350, ν = 1,6 м/с и 9-ой степени точности;
![]()
Контактное напряжение:
 (4.4)
(4.4)
![]() Мпа
Мпа
H < [H]2 - условие выполняется
[H]2 = 427МПа - допускаемое контактное напряжение
Вычисляем силы, действующие в зацеплении колес:
Окружная сила Ft:
![]() (4.5)
(4.5)
![]() Н
Н
Осевая сила Fa:
![]()
Радиальная (распорная) сила Fr:
![]() (4.6)
(4.6)
![]() Н
Н
Проверочный расчет на изгибную выносливость зубьев.
Выносливость зубьев по напряжениям изгиба проверяется по формуле:
![]() (4.7)
(4.7)
где KF = KF ∙ KFv = 1,17 - коэффициент нагрузки
KFa - коэффициент, учитывающий неравномерность распределения нагрузки между зубьями, KFa = 1,00
KF - коэффициент, учитывающий неравномерность распределения нагрузки по длине зуба, KF = 1,0 - при симметричном расположении зубчатых колес,
KFv - коэффициент динамической нагрузки, KFv = 1,07 - при HB 350(9 степень точности)
YF - коэффициент, учитывающий форму зуба и зависящий от эквивалентного числа зубьев
Коэффициент компенсации погрешности возникающей из-за применения той же расчетной схемы зуба, что и в случае прямых зубьев:
![]()
Эквивалентное число зубьев у шестерни:
![]()
YF1=3,80
Эквивалентное число зубьев у колеса:
![]() 75
75
YF2=3,61
Подставляем полученные значения параметров в формулу (4.7):
![]() МПа
МПа
![]() МПа
МПа
Fi < [Fi] – условие выполняется.
3.3.2 Расчёт шестерни и колеса II-ой ступени
Выбор материала.
Принимаем рекомендуемые марки сталей: для шестерни и для колеса.
Принимаем для шестерни Сталь45 со следующими
механическими свойствами:
Предел прочности: В = 780 МПа
Предел текучести: Т = 540 МПа
Твердость: 240НВ
Принимаем для колеса Сталь45 со следующими
механическими свойствами:
Предел прочности: В = 600 МПа
Предел текучести: Т = 320 МПа
Твердость: 170НВ.
Расчет допускаемых контактных напряжений:
Предел контактной выносливости для шестерни при базовом числе циклов
Hlimb1 = 2HB + 70 = 550
Предел контактной выносливости для колеса при базовом числе циклов
Hlimb2= 2HB + 70 = 410
Коэффициент долговечности, используя выражение (2.6):
![]()
где
![]() -
можно определить
по формуле (2.7):
-
можно определить
по формуле (2.7):
![]()
![]()
![]()
![]()
![]()
![]()
Принимаем KHL=1
[SH]= 1,1 - коэффициент безопасности
Допускаемое контактное напряжение для шестерни:
![]() =
500 МПа
=
500 МПа
Допускаемое контактное напряжение для колеса:
![]() =
372 МПа
=
372 МПа
Расчетное контактное допускаемое напряжение:
![]() =
392,4 МПа
=
392,4 МПа
Допускаемые напряжения при расчете зубьев на контактную изгибную прочность:
![]()
Пределы выносливости зубьев
Flim b1 = 1,75 ∙ HB1 = 1,75∙240 = 420 МПа
Flim b2 = 1,75 ∙ HB2 = 1,75∙170 = 297,5 МПа
SF = 1,4 –коэффициент безопасности,
KFC = 1,0 при нереверсивной передаче;
Коэффициент долговечности
Принимаем KFL= 1.
![]() МПа
МПа
![]() МПа
МПа
Определения параметров передачи:
Ka = 495 - коэффициент для стальных прямозубых колес
KH = 1,0 –коэффициент неравномерности распределения нагрузки.
ba = 0,45 - коэффициент ширины колеса
![]() 0,45
0,45
Межосевое расстояние aw:
По формуле (3.2) определим межосевое расстояние:
 мм.
мм.
по ГОСТ 2185-66 принимаем aw = 100 мм.
Определяем нормальный модуль mn:
Принимаем по ГОСТ 2185-66 mn=2 мм
Находим суммарное количество зубьев zΣ:
По формуле (3.3) определим суммарное число зубьев
![]()
Число зубьев шестерни
![]()
принимаем z1 = 46
Количество зубьев колеса z2:
![]()
принимаем z2 = 54
Фактическое передаточное число
По формуле (3.4) определим фактическое передаточное число
![]() 1,17.
1,17.
Определяем основные размеры шестерни и колеса:
Делительный диаметр шестерни:
По формуле (3.5) определим делительный диаметр шестерни
![]() мм
мм
Диаметр вершин зубьев шестерни:
По формуле (3.6) определим диаметр вершин зубьев шестерни
![]() мм
мм
Диаметр впадин зубьев колеса:
По формуле (3.7) определим диаметр впадин зубьев колеса
![]() мм
мм
Делительный диаметр колеса:
По формуле (3.8) определим делительный диаметр колеса
![]() мм
мм
Диаметр вершин зубьев колеса:
По формуле (3.9) определим диаметр вершин зубьев колеса
![]() мм
мм
Диаметр впадин зубьев колеса:
По формуле (4.0) определим диаметр впадин зубьев колеса
![]() мм
мм
Определяем ширину венца зубчатых колес:
По формуле (4.1) определим ширину венца зубчатых колес
![]() мм
- ширина колеса
мм
- ширина колеса
примем b1 = b2 + 2…5 = 50 мм - ширина шестерни
Определение окружной скорости зубчатых колёс передачи:
По формуле (4.2) определим окружную скорость зубчатых колес передачи
![]() м/с,
принимаем ν = 3 м/c
м/с,
принимаем ν = 3 м/c
Проверка контактных напряжений.
По формуле (4.3) определим коэффициент контактных напряжений
KH = 1,0 - коэффициент нагрузки для симметричного расположения колеса при HB 350, bd = 0,63.
KH = 1,2 – коэффициент, учитывающий неравномерность распределения нагрузки.
KHv = 1,03 – при HB 350, ν = 3 м/с и 9-ой степени точности
![]()
Контактное напряжение:
По формуле (4.4) определим контактные напряжения
![]() МПа
МПа
H < [H]
[H] = 392,4 МПа - допускаемое контактное напряжение
Вычисляем силы, действующие в зацеплении колес:
Окружная сила Ft:
По формуле (4.5) определим окружную силу
![]() Н
Н
Осевая сила Fa:
![]()
Радиальная (распорная) сила Fr:
По формуле (4.6) определим радиальную силу
![]() Н
Н
Проверочный расчет на изгибную выносливость зубьев:
Выносливость зубьев по напряжениям изгиба проверяется по формуле:
KF = KF ∙ KFv = 1,17 - коэффициент нагрузки
KFa = 1,00
KF = 1,0 - при симметричном расположении зубчатых колес,
KFv = 1,07 - при HB 350 и 9-ой степени точности
YF - коэффициент, учитывающий форму зуба и зависящий от эквивалентного числа зубьев
Коэффициент компенсации погрешности возникающей из-за применения той же расчетной схемы зуба, что и в случае прямых зубьев:
![]()
Эквивалентное число зубьев у шестерни:
![]()
YF1=3,66
Эквивалентное число зубьев у колеса:
![]()
YF2=3,62
![]() МПа
МПа
![]() МПа
МПа
F < [F]2 – условие выполняется.
3.4 Проектный расчёт валов привода каретки
Расчёт вала шестерни и колеса I-ой ступени
Данные для расчета:
межосевое расстояние аw = 100 мм
силы, действующие в зацеплении цилиндрической передачи
Ft11 = Ft21 = 673,31 Н, Fr11 = Fr21 = 245 Н
Ft12 = Ft22 = 935,15 Н, Fr12 = Fr22 = 340,36 Н
Принимаем материал валов: Сталь 45, с характеристиками:
предел прочности σв = 590 МПа,
допускаемое напряжение на изгиб
![]() (1.29)
(1.29)
где σ-1 = (0,40…0,45)∙σв = 219 МПа – предел выносливости,
[n] = 1,5…2,5 – коэффициент запаса прочности,
Kσ = 2,0…3,0 – коэффициент концентрации напряжений,
[τк] = 0,5∙[σи] = 25 МПа – допускаемое напряжение на кручение.
![]() МПа
МПа
На рисунке 12 изображена компоновка привода каретки.

Рисунок 10 – Эскизная компоновка привода каретки.
На рисунке 11 изображена пространственная схема сил

Рисунок 11 – Пространственная схема сил, действующих на валы привода каретки.
Толщина стенки корпуса
![]() мм
мм
Зазор между торцами колёс и стенкой редуктора
![]() мм
мм
Расстояние между серединами шестерни и колеса, посаженными на один вал
![]()
Расстояние между серединами подшипников
![]()
3.4.1 Быстроходный вал:
Построим расчетную схему сил, действующих на быстроходный вал редуктора в вертикальной плоскости.
Определяем реакции в опорах от сил в вертикальной плоскости:

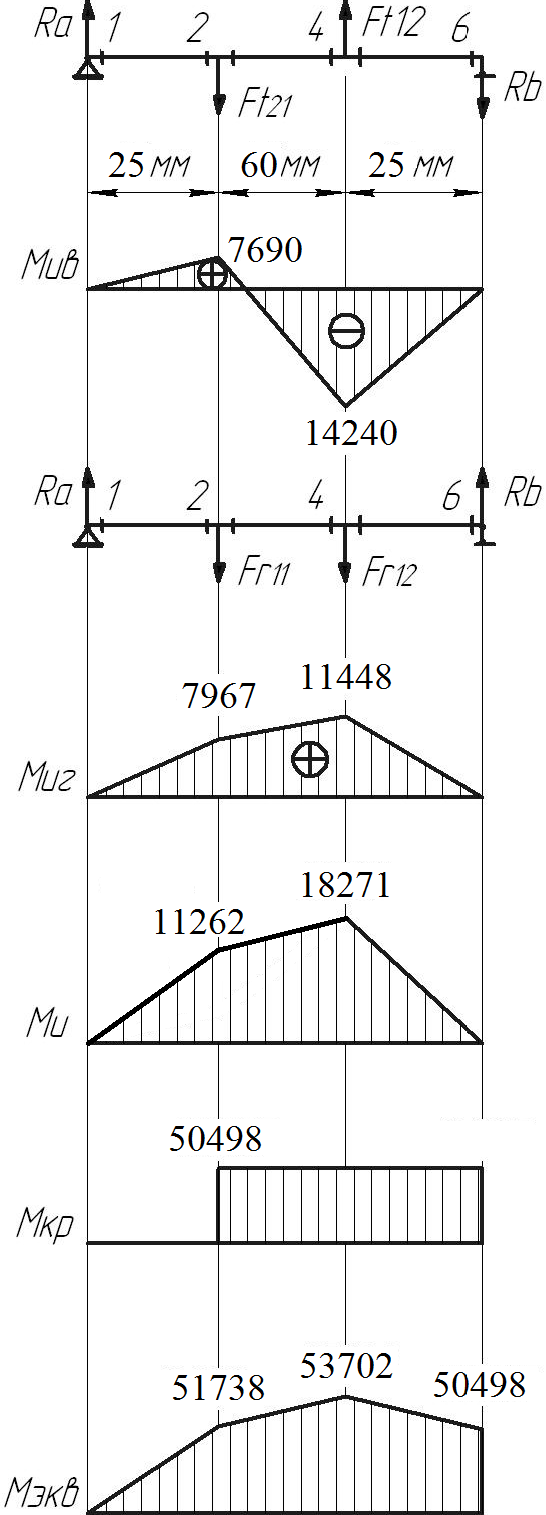
Определяем изгибающие моменты от сил, действующих в вертикальной плоскости:
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
Определяем реакции в опорах от сил в горизонтальной плоскости:

Определяем изгибающие моменты от сил, действующих в горизонтальной плоскости:
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
По найденным значениям строим эпюру изгибающих моментов.
Определяем суммарные изгибающие моменты:
![]() ,
Н∙мм
,
Н∙мм
МС2=![]() =
11262,79 Н∙мм
=
11262,79 Н∙мм
![]() ,
Н∙мм
,
Н∙мм
![]() Н∙мм
Н∙мм
По найденным значениям строим эпюру суммарных изгибающих моментов.
Строим эпюру крутящих моментов:
![]() Н∙мм
Н∙мм
Строим эпюру эквивалентных моментов:
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
3.4.2 Тихоходный вал:
Построим расчетную схему сил, действующих на быстроходный вал редуктора в вертикальной плоскости.
Определяем реакции в опорах от сил в вертикальной плоскости:
![]()
![]()
![]() Н
Н
![]()
![]()
![]() Н
Н
Определяем изгибающие моменты от сил, действующих в вертикальной плоскости:
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
![]()
Н∙мм
О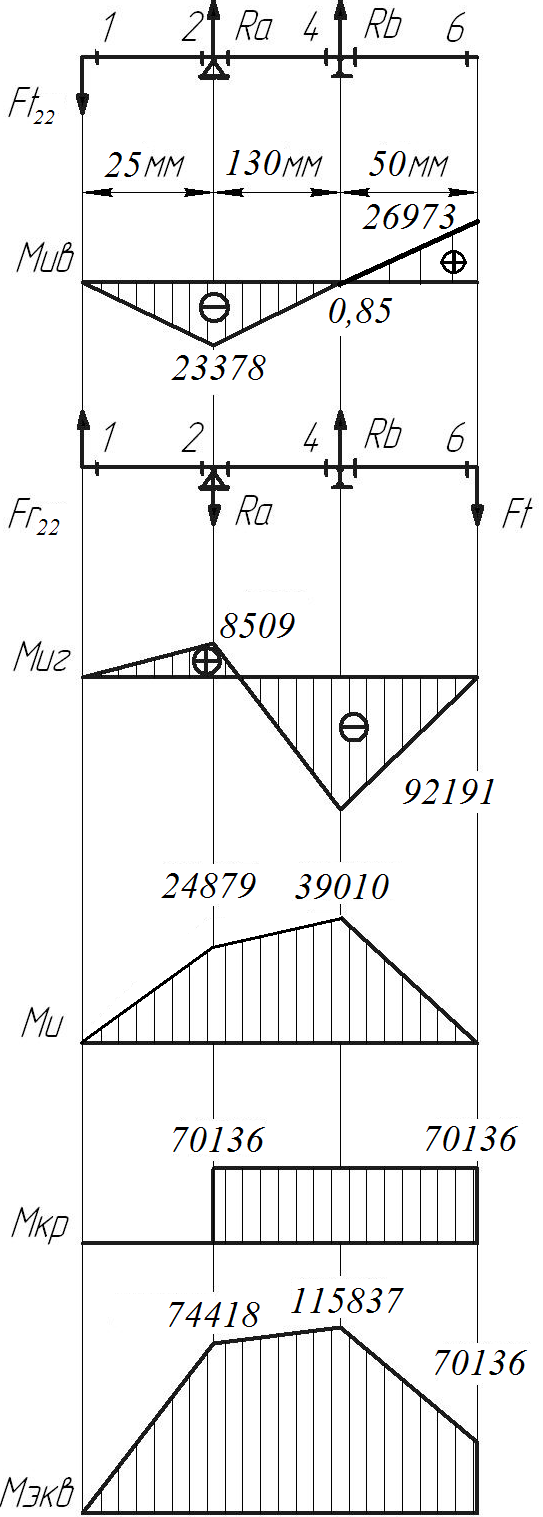 пределяем
реакции в опорах от сил в горизонтальной
плоскости:
пределяем
реакции в опорах от сил в горизонтальной
плоскости:
![]()
![]()
![]() Н
Н
![]()
![]()
![]() Н
Н
Определяем изгибающие моменты от сил, действующих в горизонтальной плоскости:
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
По найденным значениям строим эпюру изгибающих моментов.
Определяем суммарные изгибающие моменты:
![]() ,
Н∙мм
,
Н∙мм
МС2
=
![]() =
24879,1 Н∙мм
=
24879,1 Н∙мм
![]() ,
Н∙мм
,
Н∙мм
![]() Н∙мм
Н∙мм
По найденным значениям строим эпюру суммарных изгибающих моментов.
Строим эпюру крутящих моментов:
![]() Н∙мм
Н∙мм
Строим эпюру эквивалентных моментов:
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
![]() Н∙мм
Н∙мм
3.4.3 Определяем диаметры валов в сечениях
Быстроходный вал:
![]()
![]() мм
мм
принимаем
![]()
![]() мм
мм
принимаем
![]()
![]()
принимаем
![]()
Тихоходный вал:
![]()
принимаем
![]()
![]()
![]()
принимаем
![]()
![]()
принимаем
![]()
4 ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ
4.1 Анализ производительности промышленного робота
Для нахождения производительности РТК воспользуемся формулой
![]() ,
,
где tсм - продолжительность смены, ч, tсм=8;
tпз - подготовительно-заключительное время, ч, tпз=0,2;
1- коэффициент использования рабочего времени, 1=0,95;
2- коэффициент использования машинного времени, 2=0,85;
tц - время цикла, ч.
Время цикла находим по формуле
tц = 10t1 + 10t2 + t3 + t4 + t5 + t6 + t7 + t8 + t9,
где t1- среднее время подъема/опускания руки робота, с, t1 =1,5 с;
t2- время зажима/разжима губок схвата, с, t2 = 2 с
t3- среднее время перемещения от участка поступления заготовок до станка №1, с, t3 = 2,5 с;
t4- среднее время перемещения от станка №1 до станка №2,с, t4 = 2,5 с;
t5- среднее время перемещения от станка №2 до станка №3,с, t5 = 5,5 с;
t6- среднее время перемещения от станка №3 до участка погрузки деталей, с, t6 = 4,5;
t7- среднее время обработки на станке №1, с, t7= 20;
t8- среднее время обработки на станке №2, с, t8= 40;
t9- среднее время обработки на станке №3, с, t9= 30;
tц = 10∙1,5 + 10∙2 + 2,5 + 2,5 + 5,5 + 4,5 + 20 + 40 + 30 = 140 с = 0,038 ч
![]() =
165 шт.
=
165 шт.
4.2 Имитационное моделирование работы промышленного робота
Моделирование работы ПР проводим с помощью имитационного моделирования на GPSS. Цель моделирования - определение производительности РТК и степени использования оборудования.
Проведем описание технологического процесса работы ПР.
Роботизированный технологический комплекс состоит из трех станков с ЧПУ, зоны приемки и зоны готовых изделий. Компоненты прибывают каждые 10020 секунд и последовательно обрабатываются на трех станках. Роботу требуется 51 секунд, чтобы захватить или отпустить компоненты, и 2,50,5 секунды, чтобы переместить их из зоны приемки к первому станку. Время обработки на первом станке 205 секунд. Время перемещения от первого станка ко второму – 2,50,5 секунды. Время обработки на втором станке составляет 405 секунд. Перемещение от второго станка к третьему занимает 5,50,5 секунд. Время обработки на третьем станке составляет 30±5 секунды. Чтобы переместить компоненты от третьего станка в зону готовых изделий, роботу требуется 4,50,5 секунды.