Файл: Диссертация на соискание ученой степени кандидата технических наук Владимирский государственный университет.doc
Добавлен: 11.01.2024
Просмотров: 347
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
INTOUCH.
Информационный обмен обеспечивает выполнение следующих функций:
• передача команд по управлению процессом (специфические команды по управлению оборудованием) от ФПЛК в ЛПЛК.
Информационный обмен между цеховым и локальными контроллерами обеспечивается магистралью PROFIBUS на основе витой пары (до 115 Кбод/с).
Информационный обмен между цеховым контроллером и АРМ СИ обеспечивается магистралью Ethernet с известными физическими характеристиками (экранированная витая пара).
Информационный обмен между цеховым контроллером и смежными САУ обеспечивается магистральным интерфейсом RS-485 по протоколу Modbus. Модули УСО, подключаемые к каналу RS-485 с гальванической развязкой, усиливают помехозащищенность канала данных.
3.5.8 Диагностика ПТК
Диагностика ПТК обеспечивается на всех трех уровнях.
На уровне АРМа диагностируется состояние контроллеров (до отдельного модуля УСО) и магистралей обмена данными. Кроме того, в журнале событий фиксируется состояние аварийного сигнала.
На уровне цехового контроллера выполняется контроль связи Ethernet между цеховым контроллером и АРМ, контроль связи между цеховым контроллером и САУ НА (системы автоматического управления напыляющим агрегатом) каждого агрегата, диагностика состояния узлов в сети
PROFIBUS.
На уровне локального контроллера обеспечивается контроль работы узла (мастера) в сети PROFIBUS в задаче ISaGRAF, контроль входов модулей УСО, контроль входных сигналов (выход за пределы диапазона).
Для обслуживающего персонала на передних панелях процессорных модулей и блоков питания имеется световая индикация питания (+5V), состояния PROFIBUS (Тх), состояние Ethernet (Col), возможна программная индикация для пользователя (8 индикаторов). На кросс-модулях имеется индикация каждого дискретного канала и питания кросса. Каждый ИП имеет индикацию питания. Состояние ИП, модулей оптических преобразователей дверных концевых выключателей контролируется системой диагностики ПТК.
3.6 Методы отладки АСУ ТП «ПХВ-1»
В настоящее время существует множество методов отладки и диагностирования АСУ ТП. Все они подразделяются на два основных типа:
Статический метод характеризуется выработкой определенных требований к сервисной аппаратуре и стендам, которые включают входной контроль источников питания, модулей цифрового и аналогового ввода-вывода, а также подбор аппаратуры для контроля и испытаний. Кроме того, разрабатываются информационно-измерительные системы для автоматизации испытаний (Рисунок 3.15).
Динамический метод включает комплексную отладку системы и отладку алгоритмов работы системы. Динамический метод, с точки зрения метрологии, не является точностным методом, однако он может обеспечивать полную нагруженность системы переменными, работающими в реальном масштабе времени, задавать сложные специализированные алгоритмы и таким образом максимально имитировать работу системы, приближая получение реальных рабочих характеристик. Именно поэтому в данной главе уделено наибольшее внимание отладке АСУ ТП в динамическом режиме.
Для контроля работоспособности аппаратуры и комплексной отладки программно-технического комплекса «ПХВ-1» в рамках разработки проекта системы автоматизации производства бумвинила «ПХВ-1» были использованы оба метода отладки и диагностирования комплекса АСУ ТП.
Имитатор обьек-та
Иикгатор
ССС
Рисунок 3.15- Схема соединений отладочного комплекса «ПХВ-1»
ИЛ -248
FADI3
На Рисуике 3.16 и Рисунке 3.17 представлены схемы статической и динамической отладки входных-выходных сигналов телесигнализации, телеизмерений и управления. (ТС, ТИ, ТУ).
Note hock
Rs-гзг
X
F DIN FDOUT FREL FADC FDACKaiuifipaiop 81-13
Магазин со прошила нии
ИСИМТВ1НП1+.ЫИ
с ne na
tEft ffttif »<№ ilrfi 'M'l «u» Л 1.1,0».! 4LÏU1, nuKmim Wl
Рисунок 3.16 - Схема статической отладки входных-выходных сигналов ТС, ТИ и Т
У
Имитатор объекта
ПрКМ0Ч<1Н»1в"
Рисунок 3.17 - Схема динамической отладки входных-выходных сигналов ТС, ТИ и ТУ
3.6.1 Отладка алгоритмов работы системы
Для отладки отдельных алгоритмов работы программного обеспечения на входы модулей ввода подаются сигналы, имитирующие поведение объекта. Преимуществом рекомендованного автором метода моделирования НСД и мер защиты от него, а также других нештатных ситуаций, с помощью контроллеров-имитаторов и задач-имитаторов из штатного ПТК, является простота подготовительных операций. Подготовительные операции заключаются в изготовлении кабелей-переходников для передачи аналоговых сигналов от ЦАП к АЦП и от модулей цифрового вывода к модулям цифрового ввода (с подключением внешнего источника питания). На Рисунке 3.18 дана блок- схема специализированного алгоритма управления краном, реализованная при отладке комплекса «ПХВ-1» с помощью имитатора объекта.
Рисунок 3.18 - Блок-схема алгоритма управления краном 3.6.2 Имитаторы
Для комплексной отладки системы необходимо иметь ряд аппаратных и программных имитаторов объектов. Имитатор объекта комплекса в составе комплекса «ПХВ-1» (Рисунок 3.14) является программно-аппаратным средством диагностики и отладки контроллеров PEP типа IUC, VME, SMART, а также шкафов автоматики на базе данных контроллеров.
Имитатор выполняет следующие функции:
Имитатор имеет информационную емкость по параметрам:
Имитатор может работать в следующих режимах:
Режим диагностики используется при проверке модулей УСО.
Контрольно-измерительный режим применяется для отладки модулей УСО в составе контроллеров PEP или контрольно-измерительных каналов (КИК) в составе шкафа автоматики на базе контроллеров УСО. В данном режиме возможно формирование как статических, так и динамических аналоговых и дискретных сигналов в циклическом и пошаговом режиме, а также контроль и индикация входных дискретных сигналов.
Специализированные алгоритмы (например, управление кранами) применяются при комплексной отладке системы.
Имитатор может использоваться на трех уровнях архитектуры контроллерного оборудования:
На уровне 1 в контроллер загружается программа-имитатор объекта. На данном уровне производится проверка базового и прикладного программного обеспечения контроллера.
На уровнях 2, 3 используется внешний имитатор, построенный на базе контроллера IUC9000.
На уровне 2 выходы модулей УСО имитатора соединяются с входами модулей УСО контроллеров VME/IUC специализированными кабелями. На
10
4
данном уровне производится проверка базового и прикладного программного обеспечения контроллера вместе с модулями УСО.
На уровне 3 выходы модулей УСО имитатора соединяются с входными клеммниками шкафа автоматики специализированными кабелями при комплексной отладке системы. На данном уровне производится проверка базового и прикладного программного обеспечения контроллера, включая модули УСО и весь аппаратный интерфейс шкафа автоматики.
На Рисунке 3.19 и Рисунке 3.20 представлены схемы подключения имитатора к контроллеру на уровнях 2 и 3,

Notebook
Notebook
ЛПЯК
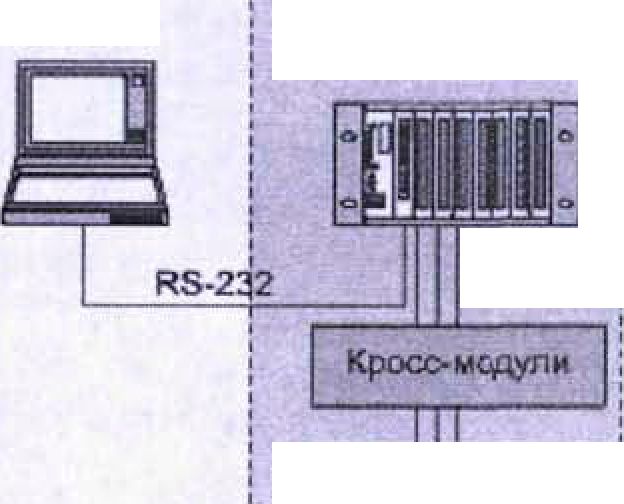
Рисунок 3.19 - Подключение имитатора к контроллеру
Notebook
Шкаф автоматики ЛПЛК
IUC9000
I Входной клгммнж ] I
---jjf-—'
Li
Имитатор объекта
Notebook

]Ш ИД
IUC9000
RS-232
C-IA2
C-ID
2
C-ID3
Рисунок 3.20 - Подключение имитатора к комплексу
На Рисунке 3.21 дана типовая схема соединений кабелей имитатора объекта для стенда АСУ ТП производства бумвинила «ПХВ-1»
Информационный обмен обеспечивает выполнение следующих функций:
-
сбор данных от ЛПЛК в ФПЛК не реже, чем 1 раз в 0,5 с; -
получение от ЛПЛК в ФПЛК изменений приоритетных (инициативных) данных не реже, чем через 0,3 с; -
выдача на ЛПЛК от ФПЛК управляющих воздействий (время прохождения одного управляющего воздействия должно составлять не более 1 с); -
получение от ЛПЛК в ФПЛК диагностической информации; -
выдачу на ЛПЛК от ФПЛК команд синхронизации времени; -
выдачу на ЛПЛК от ФПЛК информации, управляющей работой ЛПЛК. -
сбор на ФПЛК от ЛПЛК информации по технологическому процессу. ФПЛК опрашивает ЛПЛК с помощью циклических запросов; -
передача от ЛПЛК в адрес ФПЛК измененных приоритетных сигналов (по инициативе ЛПЛК);
• передача команд по управлению процессом (специфические команды по управлению оборудованием) от ФПЛК в ЛПЛК.
Информационный обмен между цеховым и локальными контроллерами обеспечивается магистралью PROFIBUS на основе витой пары (до 115 Кбод/с).
Информационный обмен между цеховым контроллером и АРМ СИ обеспечивается магистралью Ethernet с известными физическими характеристиками (экранированная витая пара).
Информационный обмен между цеховым контроллером и смежными САУ обеспечивается магистральным интерфейсом RS-485 по протоколу Modbus. Модули УСО, подключаемые к каналу RS-485 с гальванической развязкой, усиливают помехозащищенность канала данных.
3.5.8 Диагностика ПТК
Диагностика ПТК обеспечивается на всех трех уровнях.
На уровне АРМа диагностируется состояние контроллеров (до отдельного модуля УСО) и магистралей обмена данными. Кроме того, в журнале событий фиксируется состояние аварийного сигнала.
На уровне цехового контроллера выполняется контроль связи Ethernet между цеховым контроллером и АРМ, контроль связи между цеховым контроллером и САУ НА (системы автоматического управления напыляющим агрегатом) каждого агрегата, диагностика состояния узлов в сети
PROFIBUS.
На уровне локального контроллера обеспечивается контроль работы узла (мастера) в сети PROFIBUS в задаче ISaGRAF, контроль входов модулей УСО, контроль входных сигналов (выход за пределы диапазона).
Для обслуживающего персонала на передних панелях процессорных модулей и блоков питания имеется световая индикация питания (+5V), состояния PROFIBUS (Тх), состояние Ethernet (Col), возможна программная индикация для пользователя (8 индикаторов). На кросс-модулях имеется индикация каждого дискретного канала и питания кросса. Каждый ИП имеет индикацию питания. Состояние ИП, модулей оптических преобразователей дверных концевых выключателей контролируется системой диагностики ПТК.
3.6 Методы отладки АСУ ТП «ПХВ-1»
В настоящее время существует множество методов отладки и диагностирования АСУ ТП. Все они подразделяются на два основных типа:
-
статический; -
динамический.
Статический метод характеризуется выработкой определенных требований к сервисной аппаратуре и стендам, которые включают входной контроль источников питания, модулей цифрового и аналогового ввода-вывода, а также подбор аппаратуры для контроля и испытаний. Кроме того, разрабатываются информационно-измерительные системы для автоматизации испытаний (Рисунок 3.15).
Динамический метод включает комплексную отладку системы и отладку алгоритмов работы системы. Динамический метод, с точки зрения метрологии, не является точностным методом, однако он может обеспечивать полную нагруженность системы переменными, работающими в реальном масштабе времени, задавать сложные специализированные алгоритмы и таким образом максимально имитировать работу системы, приближая получение реальных рабочих характеристик. Именно поэтому в данной главе уделено наибольшее внимание отладке АСУ ТП в динамическом режиме.
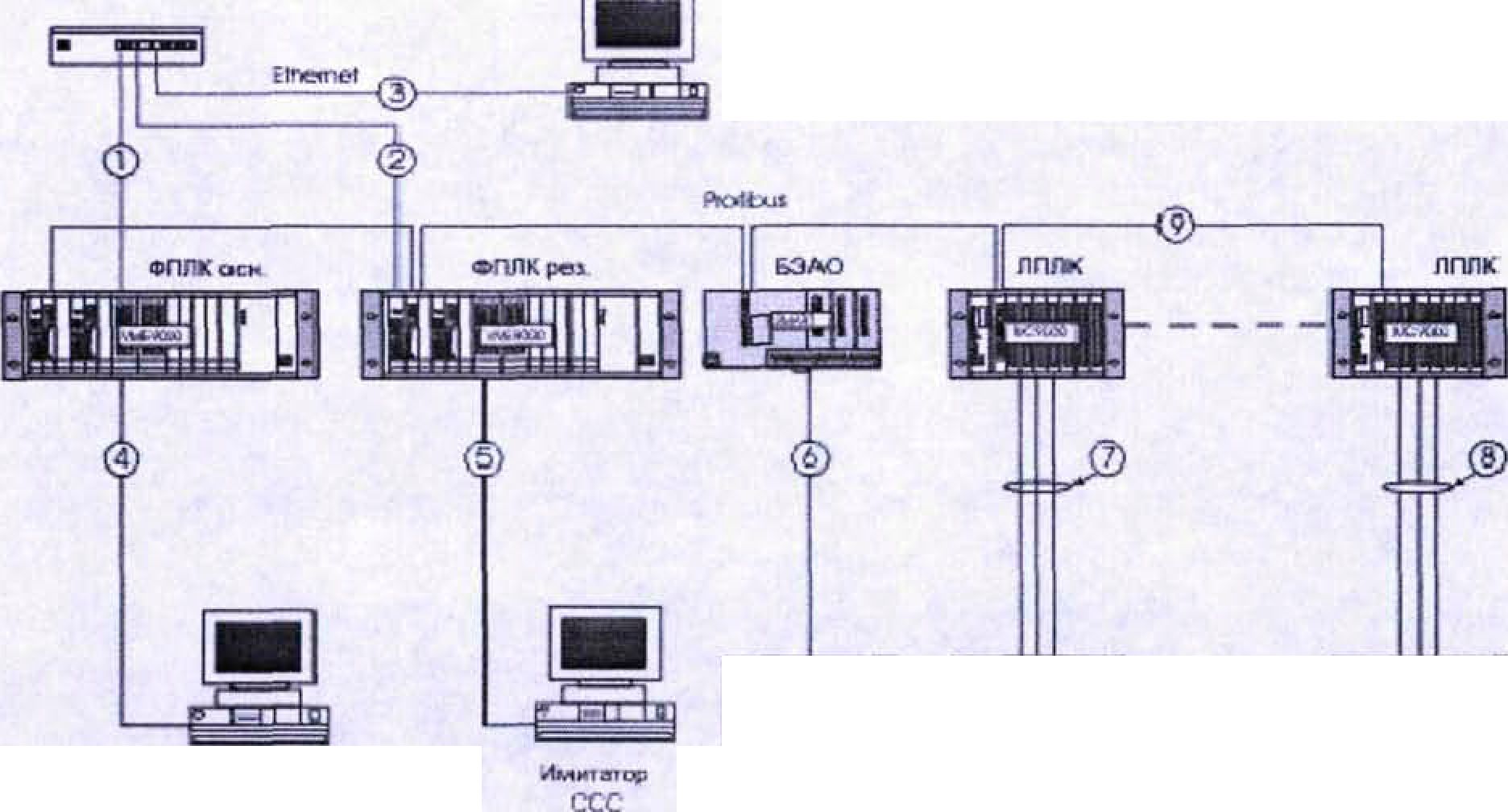
Для контроля работоспособности аппаратуры и комплексной отладки программно-технического комплекса «ПХВ-1» в рамках разработки проекта системы автоматизации производства бумвинила «ПХВ-1» были использованы оба метода отладки и диагностирования комплекса АСУ ТП.
| АРМ Ci' 1 3 ыБегм Elberret 4. 5 юбепн МоЛия Б u6wu> пульта ЗАО 7.6 >л6гг»н «ми т »тора 6 - илбепь PfofilXJ» ФПГК - фвоигагк.1!ЫМ npotpauMtcrvBMbû кпнтрвппвр ЛПШ - гижжльнь« гчиграмныруиныи кок t роллер АРМ СИ - оя памяти »роя иное рэйоие песта сиетс-июш MKttntcpa. Имитатор объекта Пулы БЭАО | [ | НЕД | в | |
Имитатор обьек-та
Иикгатор
ССС
Рисунок 3.15- Схема соединений отладочного комплекса «ПХВ-1»
ИЛ -248
FADI3
На Рисуике 3.16 и Рисунке 3.17 представлены схемы статической и динамической отладки входных-выходных сигналов телесигнализации, телеизмерений и управления. (ТС, ТИ, ТУ).
Note hock
Rs-гзг
X
F DIN FDOUT FREL FADC FDACKaiuifipaiop 81-13
Магазин со прошила нии
ИСИМТВ1НП1+.ЫИ
с ne na
tEft ffttif »<№ ilrfi 'M'l «u» Л 1.1,0».! 4LÏU1, nuKmim Wl
Рисунок 3.16 - Схема статической отладки входных-выходных сигналов ТС, ТИ и Т
У
Имитатор объекта
ПрКМ0Ч<1Н»1в"
-
- кабель С-1А2 -
- кабель С-Ю2 -
- ибиль С-103
Рисунок 3.17 - Схема динамической отладки входных-выходных сигналов ТС, ТИ и ТУ
3.6.1 Отладка алгоритмов работы системы
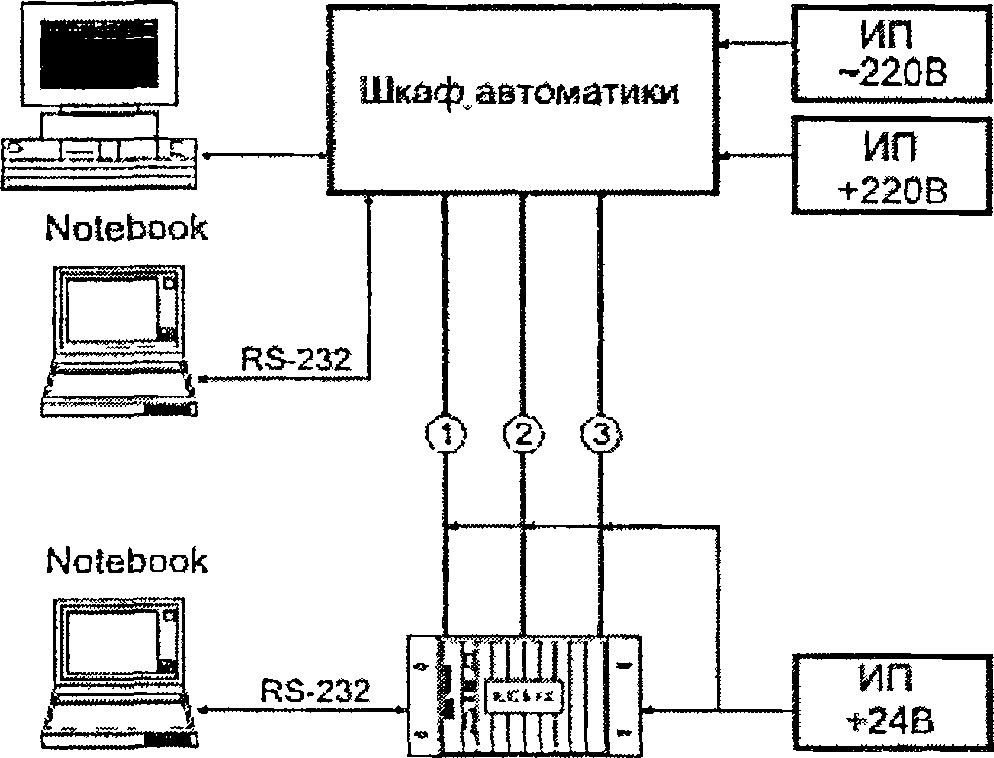
Для отладки отдельных алгоритмов работы программного обеспечения на входы модулей ввода подаются сигналы, имитирующие поведение объекта. Преимуществом рекомендованного автором метода моделирования НСД и мер защиты от него, а также других нештатных ситуаций, с помощью контроллеров-имитаторов и задач-имитаторов из штатного ПТК, является простота подготовительных операций. Подготовительные операции заключаются в изготовлении кабелей-переходников для передачи аналоговых сигналов от ЦАП к АЦП и от модулей цифрового вывода к модулям цифрового ввода (с подключением внешнего источника питания). На Рисунке 3.18 дана блок- схема специализированного алгоритма управления краном, реализованная при отладке комплекса «ПХВ-1» с помощью имитатора объекта.
Рисунок 3.18 - Блок-схема алгоритма управления краном 3.6.2 Имитаторы
Для комплексной отладки системы необходимо иметь ряд аппаратных и программных имитаторов объектов. Имитатор объекта комплекса в составе комплекса «ПХВ-1» (Рисунок 3.14) является программно-аппаратным средством диагностики и отладки контроллеров PEP типа IUC, VME, SMART, а также шкафов автоматики на базе данных контроллеров.
Имитатор выполняет следующие функции:
-
контроль дискретных выходных сигналов; -
формирование дискретных входных сигналов; -
формирование циклических аналоговых сигналов; -
формирование пошагового режима аналоговых сигналов; -
выполнение алгоритма управления кранами; -
выполнение специализированных алгоритмов для отладки объектов.
Имитатор имеет информационную емкость по параметрам:
-
количество каналов дискретных входов (ТС) — 40; -
количество каналов дискретных выходов (ТУ) — 32; -
количество каналов аналоговых выходов (ТИ) — 16.
Имитатор может работать в следующих режимах:
-
диагностика модулей; -
контрольно-измерительный; -
специализированные алгоритмы.
Режим диагностики используется при проверке модулей УСО.
Контрольно-измерительный режим применяется для отладки модулей УСО в составе контроллеров PEP или контрольно-измерительных каналов (КИК) в составе шкафа автоматики на базе контроллеров УСО. В данном режиме возможно формирование как статических, так и динамических аналоговых и дискретных сигналов в циклическом и пошаговом режиме, а также контроль и индикация входных дискретных сигналов.
Специализированные алгоритмы (например, управление кранами) применяются при комплексной отладке системы.
Имитатор может использоваться на трех уровнях архитектуры контроллерного оборудования:
-
уровень системной шины — программный имитатор; -
уровень модулей УСО — программно-аппаратный имитатор; -
уровень входных клеммников шкафа автоматики — программно- аппаратный имитатор.
На уровне 1 в контроллер загружается программа-имитатор объекта. На данном уровне производится проверка базового и прикладного программного обеспечения контроллера.
На уровнях 2, 3 используется внешний имитатор, построенный на базе контроллера IUC9000.
На уровне 2 выходы модулей УСО имитатора соединяются с входами модулей УСО контроллеров VME/IUC специализированными кабелями. На
10
4
данном уровне производится проверка базового и прикладного программного обеспечения контроллера вместе с модулями УСО.
На уровне 3 выходы модулей УСО имитатора соединяются с входными клеммниками шкафа автоматики специализированными кабелями при комплексной отладке системы. На данном уровне производится проверка базового и прикладного программного обеспечения контроллера, включая модули УСО и весь аппаратный интерфейс шкафа автоматики.
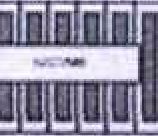
На Рисунке 3.19 и Рисунке 3.20 представлены схемы подключения имитатора к контроллеру на уровнях 2 и 3,
Notebook
Notebook
ЛПЯК
| Ииитатор объекта | | C-LA1 | гп | ■ |
| RS-232 | | C-ID1 | M | RS-232 |
| 1 | 1 | |||
Рисунок 3.19 - Подключение имитатора к контроллеру
Notebook
Шкаф автоматики ЛПЛК
IUC9000
I Входной клгммнж ] I
---jjf-—'
Li
Имитатор объекта
Notebook
]Ш ИД
IUC9000
RS-232
C-IA2
C-ID
2
C-ID3
Рисунок 3.20 - Подключение имитатора к комплексу
На Рисунке 3.21 дана типовая схема соединений кабелей имитатора объекта для стенда АСУ ТП производства бумвинила «ПХВ-1»