Файл: 2. Составление структурной схемы системы и определение передаточной функции, разомкнутой и замкнутой систем между задающим воздействием и выходом сар. Составление соответствующих дифференциальных уравнений и уравнений статики. 3.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 47
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
3. Построить область устойчивости в функции параметров элементов САУ указанных преподавателем.
6. Расчет нулей и полюсов системы, степень устойчивости и колебательность системы.
7.Выбор параметров регулятора из условия минимума среднеквадратичного отклонения.
Н айдем коэффициенты ошибок передаточной функции замкнутой системы по задающему воздействию:
айдем коэффициенты ошибок передаточной функции замкнутой системы по задающему воздействию:
Позиционной ошибка ( )
)
Коэффициент скоростной ошибки ( )
)

Коэффициент ошибки по ускорению ( )
)
Найдем коэффициенты ошибок передаточной функции замкнутой системы по возмущающемуся воздействию:
П озиционной ошибка ( )
озиционной ошибка ( )
 Коэффициент скоростной ошибки ( )
Коэффициент скоростной ошибки ( )
К оэффициент ошибки по ускорению( )
оэффициент ошибки по ускорению( )
Рассчитаем коэффициенты ошибок для оптимизированных данных

Н айдем коэффициенты ошибок передаточной функции замкнутой системы по задающему воздействию:
айдем коэффициенты ошибок передаточной функции замкнутой системы по задающему воздействию:
Позиционной ошибка ( )
Коэффициент скоростной ошибки ( )
К оэффициент ошибки по ускорению ( )
оэффициент ошибки по ускорению ( )
Найдем коэффициенты ошибок передаточной функции замкнутой системы по возмущающемуся воздействию:
Позиционной ошибка ( )
Коэффициент скоростной ошибки ( )
Коэффициент ошибки по ускорению( )
Сравним показатели качества регулирования для исходных, оптимизированных данных и данных из первого приближения:
В результате сравнения характеристик, можно сделать вывод о лучших параметрах регулирования.
Оптимизированные данные является лучшими в категориях: Время перерегулирования, Затухание, Позиционная, скоростная ошибка (по задающему воздействию), Ошибка по ускорению (по задающему воздействию).
Данные первого приближения являются лучшими во Времени регулировании, в Позиционной, скоростной ошибке (по возмущающемуся воздействию), ошибке по ускорению (по возмущающемуся воздействию).
Исходные данные показывают наихудший результат в сравнении с остальными.
11. Исследование влияния вариаций численных значений общего коэффициента передачи прямой характеристики
Воспользуемся следующей схемой:
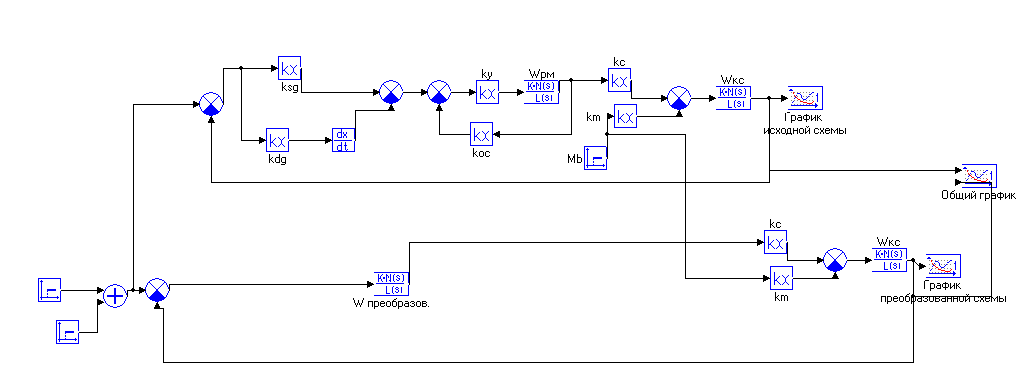
Рисунок 21.- Структурная схема.(Исходная схема и преобразованная.mrj)
Рассчитаем номинальное значение коэффициента:
Рассчитаем точки для вариации в двух направлениях:
+25% :
+50%:
-25%:
-50%:
Меняем параметры блока «ky» и смотрим на изменение характеристик:
+25% :
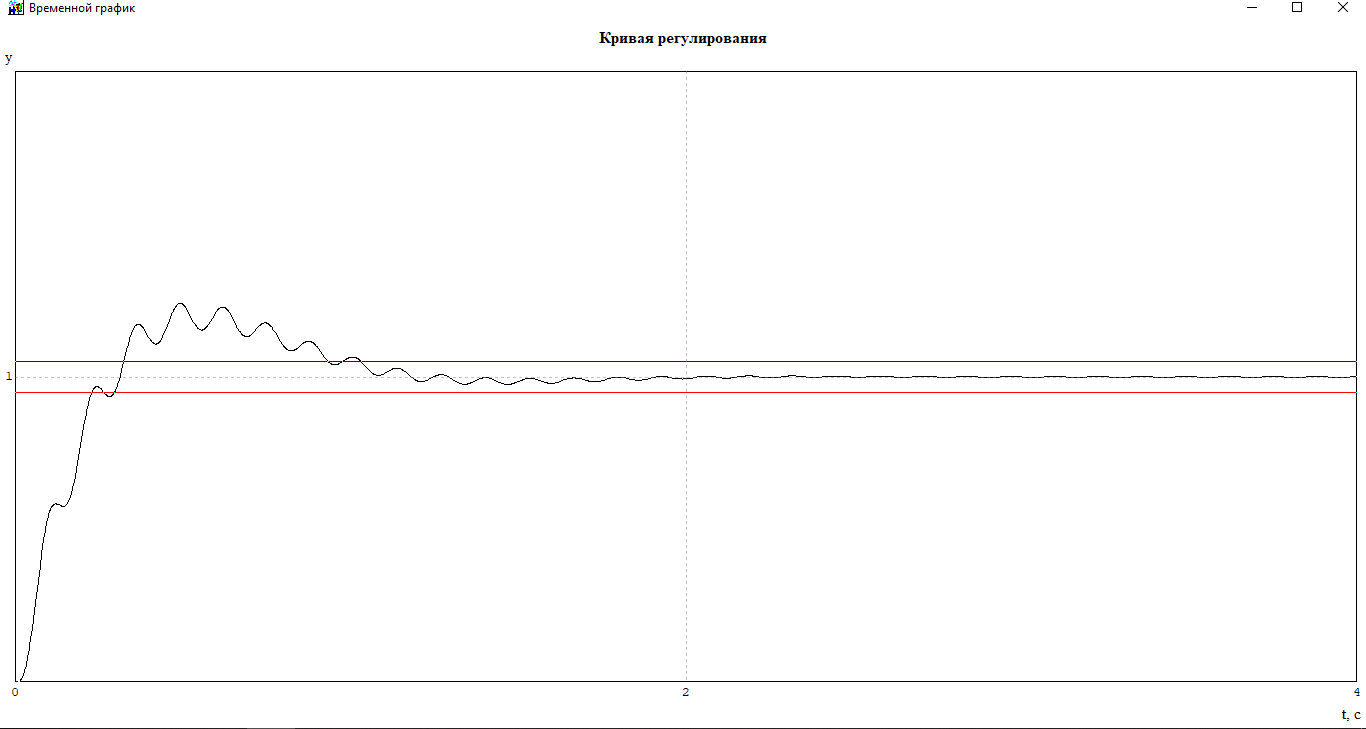
Рисунок 22- График с параметрами блока +25%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование:

Система с параметрами блока «kу» +25% от kном является устойчивой.
Меняем параметры блока «ky» и смотрим на изменение характеристик:
+50% :
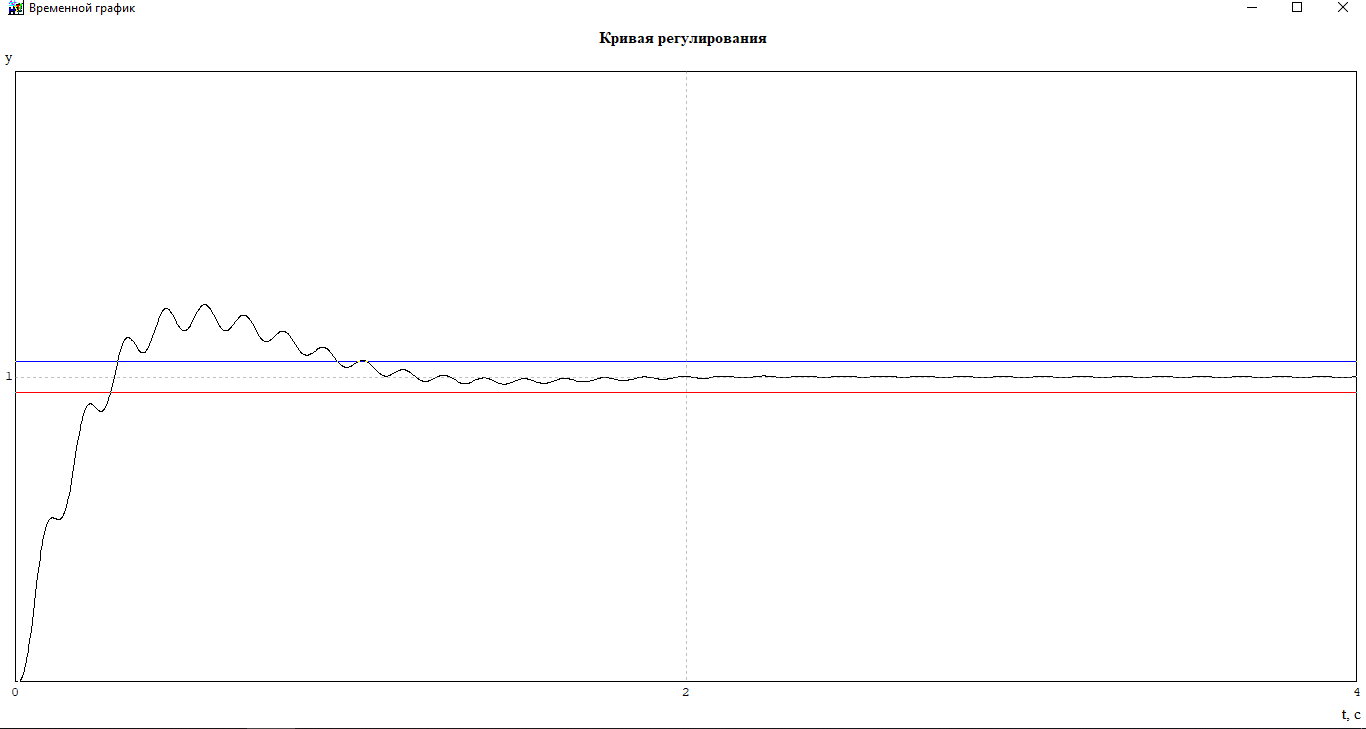
Рисунок 23.- График с параметрами блока +25%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование:

Система с параметрами блока «kу» +50% от kном является устойчивой.
Меняем параметры блока «ky» и смотрим на изменение характеристик:
-25% :
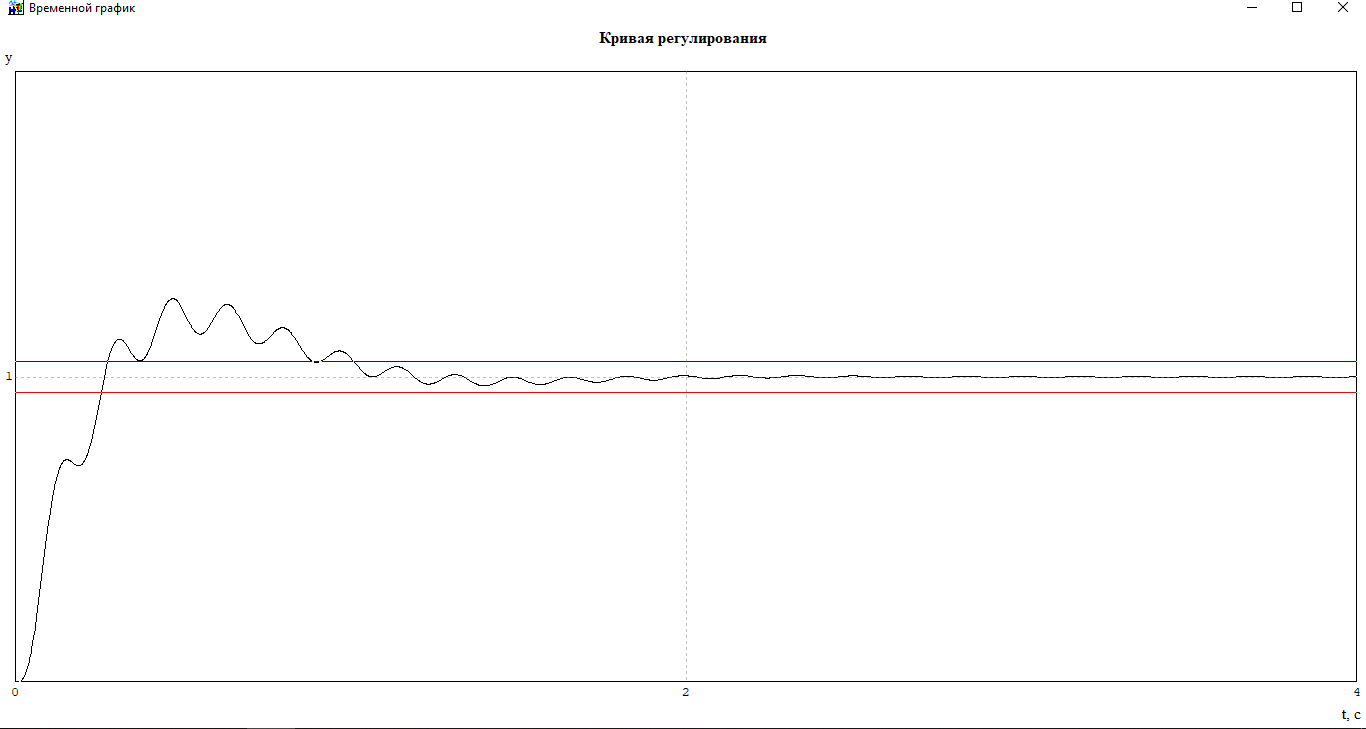
Рисунок 24 График с параметрами блока -25%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование: 
Система с параметрами блока «kу» -25% от kном является устойчивой.
Меняем параметры блока «ky» и смотрим на изменение характеристик:
-50% :
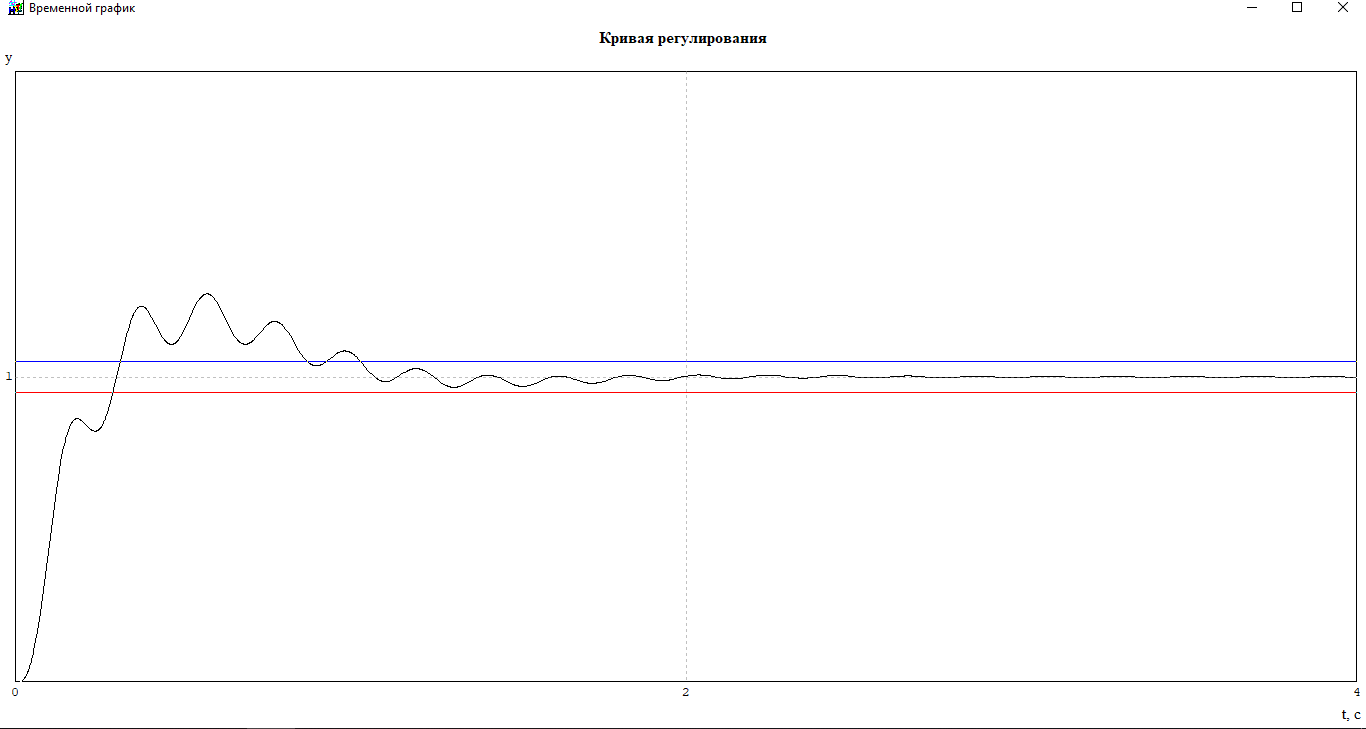
Рисунок 26- График с параметрами блока -50%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование: 
Система с параметрами блока «kу» -50% от kном является устойчивой
айдем коэффициенты ошибок передаточной функции замкнутой системы по задающему воздействию:Позиционной ошибка (
) Коэффициент скоростной ошибки (
) Коэффициент ошибки по ускорению (
) Найдем коэффициенты ошибок передаточной функции замкнутой системы по возмущающемуся воздействию:
П
озиционной ошибка ( ) Коэффициент скоростной ошибки ( )К
оэффициент ошибки по ускорению( )Рассчитаем коэффициенты ошибок для оптимизированных данных
Н
айдем коэффициенты ошибок передаточной функции замкнутой системы по задающему воздействию:Позиционной ошибка (
) Коэффициент скоростной ошибки (
)К
оэффициент ошибки по ускорению ( )Найдем коэффициенты ошибок передаточной функции замкнутой системы по возмущающемуся воздействию:
Позиционной ошибка (
) Коэффициент скоростной ошибки (
) Коэффициент ошибки по ускорению(
) -
Сравнение показателей качеств регулирования.
Сравним показатели качества регулирования для исходных, оптимизированных данных и данных из первого приближения:
| Данные | Исходные | Первое приближение | Оптимизированные |
| Время регулирования | 1.7 | 1.03 | 1.6 |
| Время перерегулирования | 27% | 31% | 18% |
| Затухание | 0.08 | 0.11 | 0,05 |
| Коэффициенты ошибок передаточной функции замкнутой системы по задающему воздействию | |||
| Позиционная ошибка ( ) | 0 | -0.000000001 | 0 |
| Скоростная ошибка ( ) | 0.08 | 0.0288 | 0.207 |
| Ошибка по ускорению ( ) | 0.19 | 0.09 | -0.048 |
| Коэффициенты ошибок передаточной функции замкнутой системы по возмущающемуся воздействию | |||
| Позиционная ошибка ( ) | -0.032 | -0.01 | -0.82 |
| Скоростная ошибка ( ) | 0.018 | 0.014 | 0.159 |
| Ошибка по ускорению ( ) | -0.014 | -0.01 | -0.56 |
В результате сравнения характеристик, можно сделать вывод о лучших параметрах регулирования.
Оптимизированные данные является лучшими в категориях: Время перерегулирования, Затухание, Позиционная, скоростная ошибка (по задающему воздействию), Ошибка по ускорению (по задающему воздействию).
Данные первого приближения являются лучшими во Времени регулировании, в Позиционной, скоростной ошибке (по возмущающемуся воздействию), ошибке по ускорению (по возмущающемуся воздействию).
Исходные данные показывают наихудший результат в сравнении с остальными.
11. Исследование влияния вариаций численных значений общего коэффициента передачи прямой характеристики
Воспользуемся следующей схемой:
Рисунок 21.- Структурная схема.(Исходная схема и преобразованная.mrj)
Рассчитаем номинальное значение коэффициента:
Рассчитаем точки для вариации в двух направлениях:
+25% :
+50%:
-25%:
-50%:
Меняем параметры блока «ky» и смотрим на изменение характеристик:
+25% :
Рисунок 22- График с параметрами блока +25%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование:
Система с параметрами блока «kу» +25% от kном является устойчивой.Меняем параметры блока «ky» и смотрим на изменение характеристик:
+50% :
Рисунок 23.- График с параметрами блока +25%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование:
Система с параметрами блока «kу» +50% от kном является устойчивой.
Меняем параметры блока «ky» и смотрим на изменение характеристик:
-25% :
Рисунок 24 График с параметрами блока -25%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование:
Система с параметрами блока «kу» -25% от kном является устойчивой.
Меняем параметры блока «ky» и смотрим на изменение характеристик:
-50% :
Рисунок 26- График с параметрами блока -50%.(Исходная схема и преобразованная.mrj)
Время регулирования:
Перерегулирование:
Система с параметрами блока «kу» -50% от kном является устойчивой