Файл: Техническое задание 8 1Основные задачи и цели создания асу тп 8.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 23.11.2023
Просмотров: 193
Скачиваний: 2
СОДЕРЖАНИЕ
Требования к техническому обеспечению
Требования к метрологическому обеспечению
Функциональная схема автоматизации
Назначение прибора ОВЕН ТРМ 138
Рисунок 1 – Измеритель-регулятор ОВЕН ТРМ 138
Автоматический преобразователь интерфейсов RS-232/RS-485 О ВЕН АС3-М
Рисунок 2 – Автоматический преобразователь интерфейсов RS-232/RS- 485 ОВЕН АС3-М
Рисунок 4 – Датчик давления ОВЕН ПД100 (слева) и ПД200 (справа)
Рисунок 6 – Датчик (сигнализатор) угарного газа ОВЕН ДЗ-1-СО
Рисунок 7 – Датчик (сигнализатор) метана ОВЕН ДЗ-1-СН4
Рисунок 8 – Клапан электромагнитный фланцевый серии ВН
Рисунок 9 – Преобразователь частоты ПЧВ3
Рисунок 10 – Функциональная схема системы поддержания температу ры в печи
Рисунок 11 – Модель в Simulink
-
Выбор регулятора асинхронного двигателя
Выброс дыма в трубу, рециркуляция воздуха, подача воздуха на гор ение, создание воздушной завесы, отбор теплоносителя на сушилки, а также воздушное охлаждение, осуществляется следующими вентиляторами и дым ососами: ВР-189-57, Д167-37-12, ВГДН-19М. Их основные характеристики, а также характеристики установленных в них двигателей, приведены в таб лице 10.
Таблица 10 – Технические характеристики используемых вентиляторов и д ымососов
| Характеристика | Значение | ||
| Тип | ВР-189-57 | Д167-37-12 | ВГДН-19М |
| Производ., 103 м3/ч: в ном. режиме в раб. зоне | 7 7,63 – 10,3 | 40,3 8,5-53,5 | 106 |
| Полное давление, Па: в ном. режиме в раб. зоне | 1515 1565 –1530 | 3937 3286-3870 | 2730 |
| Част, вращ. раб колес а, об/мин | 1440 | 985 | 985 |
| Электродвигатель | |||
| Тип | AMP132S4 | АИР280S6 | АИР380S7 |
| Мощность, кВт | 7,5 | 75 | 90 |
| Частота вращ., ом/мин | 1500 | 1000 | 1000 |
Для регулирования оборотов электродвигателя будем использовать п реобразователь частоты (ПЧ). Остановим свой выбор на преобразователе ч астоты ПЧВ3 фирмы «Овен» (рисунок 9).

Рисунок 9 – Преобразователь частоты ПЧВ3
Выбор данной модели обусловлен тем необходимым диапазоном м ощностей 0,37…90 кВт, таким образом она подойдѐт для каждого из венти ляторов (дымососов). Технические характеристики ПЧВ3 приведены в таб лице 11.
Таблица 11 – Технические характеристики преобразователя частоты ПЧВ3
| Характеристика | Значение |
| Питающая сеть, 3 фазы, В | 200…240 (0,25…11 кВт) 380…480 (0,37…90 кВт) |
| Выходное напряжение (U,V,W), % | 0…100 |
| Выходная частота, Гц | 0…200 (VC), 0…400 (U/F) |
| Диапазон входного тока (завис. от модиф.), А | 1,5 – 182 |
| Диапазон выходного тока (завис. от модиф.), А | 1,5 – 177 |
| Цифровые входы | 4 |
| Аналоговые входы | 2 U/I |
| Аналоговые выходы | 2 I |
| Релейные выходы | 2 (240 В, 2 А) |
| Протокол RS-485 | Modbus RTU, FLN; BACnet MSTP |
| Класс защиты корпуса | IP20 |
| Диапазон рабочих температур, ºС | 0…40 |
-
Разработка схемы внешних проводок
Схема внешней проводки приведена в Приложении В. Первичные и в не щитовые приборы включают в себя датчики температуры ХА (ДТПК), Х К (ДТПL) и S (ДТПS021), расположенные во всех зонах ТП; датчики давле ния ОВЕН ПД100 и ОВЕН ПД200, расположенные на входе
и выходе из ТП, а также в газовом и воздушном трубопроводах; индуктивные датчики, устан овленные в сводах гильотинных ворот. Все датчики передают информацию посредством унифицированного токового сигнала 4…20 мА.
Для передачи сигналов от датчиков на щит КИПиА используются по три провода. В качестве кабеля выбран КВВГ. Это – кабель с медными ток опроводящими жилами с пластмассовой изоляцией в пластмассовой оболо чке, с защитным покровом и предназначен для неподвижного присоединен ия к электрическим приборам, аппаратам и распределительным устройствам номинальным переменным напряжением до 660 В частотой до 100 Гц или п остоянным напряжением до 1000 В при температуре окружающей среды от
-50°С до +50°С. Медные токопроводящие жилы кабелей КВВГ выполнены о днопроволочными. Изолированные жилы скручены. Кабель прокладывается в трубе диаметром 20 мм.
-
Выбор алгоритмов управления АС ТП
В автоматизированной системе на разных уровнях управления испол ьзуются различные алгоритмы:
-
алгоритмы пуска (запуска)/ останова технологического оборудо вания (релейные пусковые схемы) (реализуются на ПЛК и SCADA-форме); -
релейные или ПИД-алгоритмы автоматического регулирования т ехнологическими параметрами технологического оборудования (управлени е положением рабочего органа, регулирование давления, и т. п.) (реализуют ся на ПЛК); -
алгоритмы управления сбором измерительных сигналов (алгор итмы в виде универсальных логически завершенных программных блоков, п омещаемых в ППЗУ контроллеров); -
алгоритмы автоматической защиты (ПАЗ); -
алгоритмы централизованного управления АС (реализуются на SCADA-форме) и др.
В данном проекте разработаны следующие алгоритмы АС:
-
алгоритм сбора данных измерений; -
алгоритм автоматического регулирования технологическим пар аметром.
Для представления алгоритма пуска/останова и сбора данных будем использовать правила ГОСТ 19.002.
-
Алгоритм сбора данных измерений
В качестве канала измерения выберем канал измерения температуры в зоне обжига. Для этого канала разработаем алгоритм сбора данных, предс тавленный в приложении Г.
-
Алгоритм автоматического регулирования технологическим пар аметром
В процессе работы ТП необходимо поддерживать температуру в зоне обжига, чтобы она не превышала заданного уровня и не падала ниже задан ного уровня, исходя из условий необходимых для правильного обжига кир пича. Поэтому в качестве регулируемого параметра технологического проце сса выбираем температуру в зоне обжига. В качестве алгоритма регулиров ания будем использовать алгоритм ПИД регулирования, который позволяет обеспечить хорошее качество регулирования, достаточно малое время вых ода на режим и невысокую чувствительность к внешним возмущениям.
ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаѐт управляющий сигнал, являющийся с уммой трѐх слагаемых, первое из которых пропорционально этому отклоне нию, второе пропорционально интегралу отклонения и третье пропорциона льно производной отклонения.
Структурная схема автоматического регулирования температурой с остоит из следующих основных элементов: задание, ПЛК с ПИД-регулятор ом, регулирующий орган, объект управления.
Функциональная схема системы поддержания давления в трубопров оде приведена на рисунке 10.

 Тз Т
Тз Т


Рисунок 10 – Функциональная схема системы поддержания температу ры в печи
Объектом управления является зона обжига ТП. С панели оператора задается температура, которую необходимо поддерживать в печи. Далее эта температура приводится к унифицированному токовому сигналу 4-20 мА и подается на ПЛК. В ПЛК также подается значение с датчика температуры, п роисходит сравнивание значений, и формируется выходной токовый сигнал. Этот сигнал подается на электромагнитный клапан которым регулируется д авление в газа в трубопроводе.
В процессе управления объектом необходимо поддерживать давлени е газа равное 6 МПа, поэтому в качестве передаточной функции задания выс тупает ступенчатое воздействие, которое в момент запуска программы мен яет свое значение с 0 до 6.
Модель в Simulink представлена в альбоме схем (ФЮР А.425280.001.ЭС.10), а также приведена на рисунке 11.
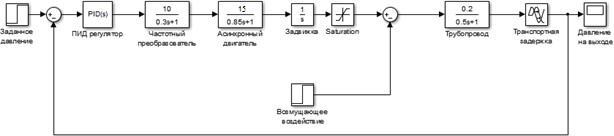
Рисунок 11 – Модель в Simulink
График переходного процесса САР представлен на рисунке 12.
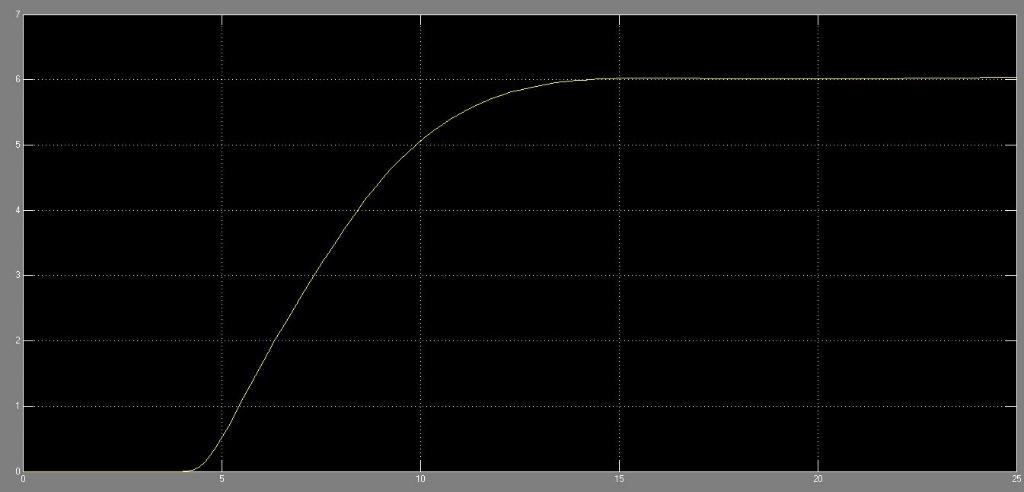
Рисунок 12 – График переходного процесса САР
Как видно процесс получился апериодический, статическая ошибка с тремится к нулю, а время переходного процесса приблизительно 12 сек.
-
Экранные формы АС ТП
Управление в АС ТП реализовано