Файл: Техническое задание 10 На курсовой проект по дисциплине Механика 2 выдано студенту Кутонов Вячеслав Сергеевич группа 5А93.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 111
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РФ
Федеральное государственное бюджетное образовательное учреждение высшего образования
“НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ”
Школа базовой инженерной подготовки
Отделение общетехнических дисциплин
ТЕХНИЧЕСКОЕ ЗАДАНИЕ № 10
На курсовой проект по дисциплине «Механика 2»
выдано студенту Кутонов Вячеслав Сергеевич группа 5А93
шифр студента 31710
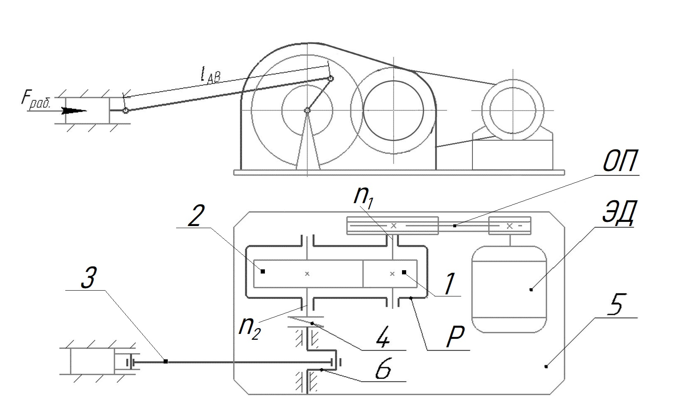
ЭД – электродвигатель;
ОП – открытая цепная передача;
Р – закрытая зубчатая передача (редуктор);
1 – ведущая шестерня редуктора (ведущий вал);
2 – ведомое колесо редуктора (ведомый вал);
3 – шатун исполнительного механизма;
4 – муфта;
5 – плита;
6 – кривошип (коленчатый вал) исполнительного механизма
n1 – частота вращения ведущего вала;
n2 – частота вращения выходного вала редуктора.
Исходные данные:
| частота вращения nII = 80 об/мин; длина шатуна lАВ =0,47 м; длина кривошипа lОА =0,16 м; сила полезного сопротивления Fраб = 5 кН срок службы привода h = 6 тыс. час. |  |
Содержание
1. Структурный анализ механизма 2
2. Кинематическое исследование механизма методом планов 6
2.1. Построение планов механизма 6
2.2. Построение планов скоростей 7
9
Рисунок 2 – План скоростей для начального положения 9
2.3. Построение планов ускорений 9
3. Силовой анализ рычажного механизма 12
3.1. Определение сил, действующих на звенья механизма и моментов инерции 12
12
3.2. Силовой расчет группы 2-3 14
3.4. Рычаг Жуковского 18
5) Энергокинематический расчёт электропривода 22
6) Расчёт открытой передачи 24
7) Выбор материала, термообработки и твердости 28
8) расчёт закрытой передачи 33
9) Определение усилия в зацеплении 40
10) Конструирование зубчатых колес передачи. 44
11) Расчёт конструктивных размеров корпуса редуктора. 46
12) Первый этап компоновки. 48
16) Расчет валов на усталостную прочность 56
17) Конструирование подшипниковых узлов 62
18) Расчет шпоночных соединений 64
19) Расчет болтовых соединений 65
21) Сборка редуктора 71
22) Заключение 72
1. Структурный анализ механизма
Цель структурного анализа – выявить строение (структуру) механизма.
При этом необходимо:
-
Определить число звеньев механизма и назвать каждое из них; -
Определить число кинематических пар и дать характеристику (соединения каких звеньев, вид (вращательная, поступательная), характер соприкосновения звеньев (низшая или высшая кинематическая пара), число степеней свободы(класс)); -
Выявить структурные группы (группы Ассура), входящие в состав механизма; привести схемы групп, назвать их, определить класс группы, написать формулу строения; -
Определить степень подвижности механизма (по формуле П.Л.Чебышева); -
Привести формулу строения механизма (в общем и развернутом виде).
Таблица 1 – Структурный анализ механизма
| Подвижные звенья | Кинематические пары | ||||||||
| Схема | Название | Схема | Название | Степень подвиж-ности | Символ | ||||
 | Кривошип-зубчатое колесо |  | Враща-тельная низшая | 1 | В0.1 | ||||
 | Кривошип-зубчатое колесо |  | Зубчатая высшая | 2 | ВП1.2 | ||||
 | Шатун | 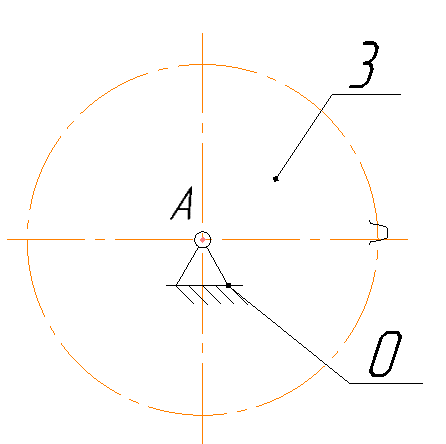 | Враща-тельная низшая | 1 | В3,0 | ||||
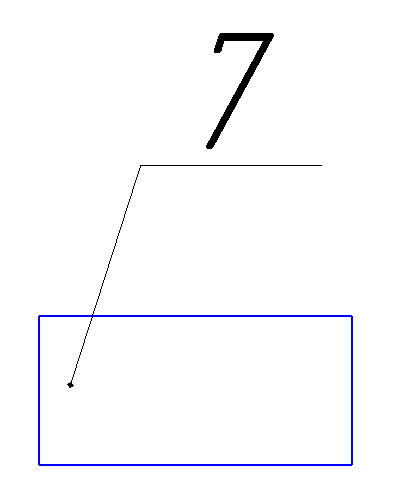 | Ползун | 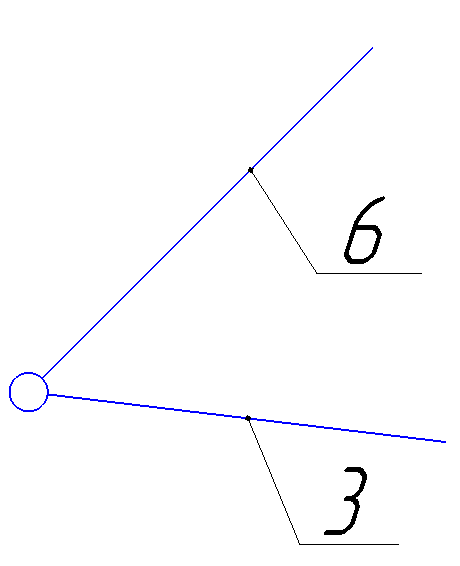 | Враща-тельная низшая | 1 | В3,6 | ||||
| | | 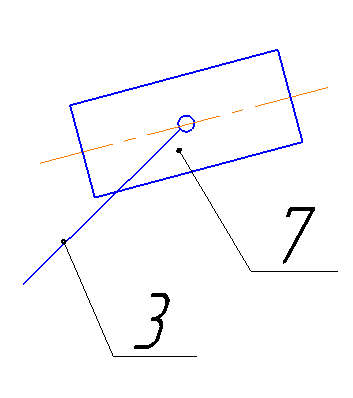 | Враща-тельная низшая | 1 | В3,7 | ||||
| | | 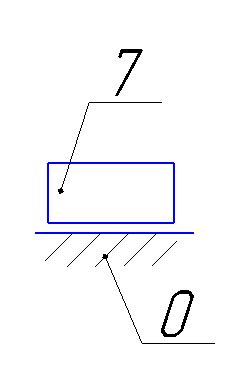 | Поступа-тельная низшая | 1 | П7,0 | ||||
| Число звеньев n=4 | Число кинематических пар Р5=5 Р4=1 | ||||||||
| Степень подвижности механизма W=3n - 2Р5 – Р4= 3*4 - 2*5 - 1=1 | |||||||||
| Схема | Название | К-во звеньев | К-во кине-матич. пар | Формула строения | |||||
 | Начальный вращательный механизм (1 класса) | 1 | 1 | В0,1 | |||||
 | Однозвенная 2-х поводковая группа Ассура с вращательной и зубчатой парой (2 класса) | 1 | 2 | [ ВП1,2 - В2,0 ] | |||||
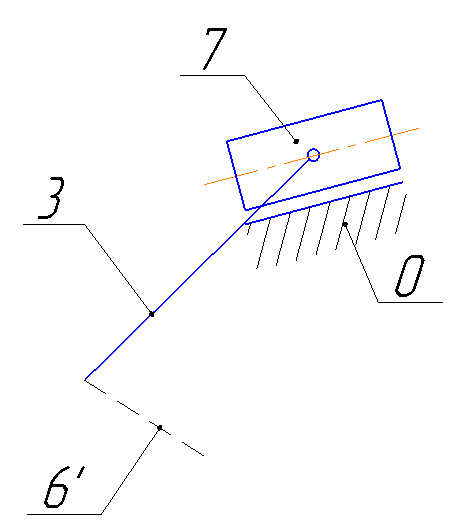 | 2-х звенная, 2-х поводковая группа Ассура с 2-мя вращательными парами и 1-ой поступательной парой | 2 | 3 | [ В3,6 –В3,7 -П7,0 ] | |||||
| Кол-во начальных механизмов - 1 | Кол-во групп Ассура- 2 | ||||||||
| Формула строения механизма: В0.1- [ ВП1,2 - В2,0 ]-[ В3,6 – В3,7 - П7,0 ] Механизм 2 класса, содержит две группы Ассура, соединенные последовательно. | |||||||||
2. Кинематическое исследование механизма методом планов
Задача кинематического исследования механизма состоит в определении:
- численных значений линейных скоростей всех характерных точек механизма (кинематических пар, центров тяжести) и угловых скоростей всех звеньев для рассматриваемых положений, для чего построить планы скоростей для рабочего положения;
- численных значений линейных ускорений всех характерных точек механизма и угловых ускорений всех звеньев для данных положений, для чего построить планы ускорений для того же положения;
- траекторий некоторых точек звеньев.
частота вращения nII = 80 об/мин;
длина шатуна lАВ =0,47 м;
длина кривошипа lОА =0,16 м;
сила полезного сопротивления Fраб = 5 кН
срок службы привода h = 6 тыс. час.
2.1. Построение планов механизма
Планы положений механизма строим методом засечек, для определения длин звеньев в миллиметрах, задаем масштабный коэффициент:

где
 - длина звена ОА, м;
- длина звена ОА, м; - длина звена АВ на плане положений, мм
- длина звена АВ на плане положений, ммДлины звеньев на чертеже:
где ОА, АВ – длина звеньев на плане положений механизма, мм;
 – длина соответствующих звеньев механизма, м.
– длина соответствующих звеньев механизма, м.Определяем крайние положения звена 3, для этого звенья 1 и 2 выстраиваем на одной прямой линии.
Крайнее положение: нулевое.
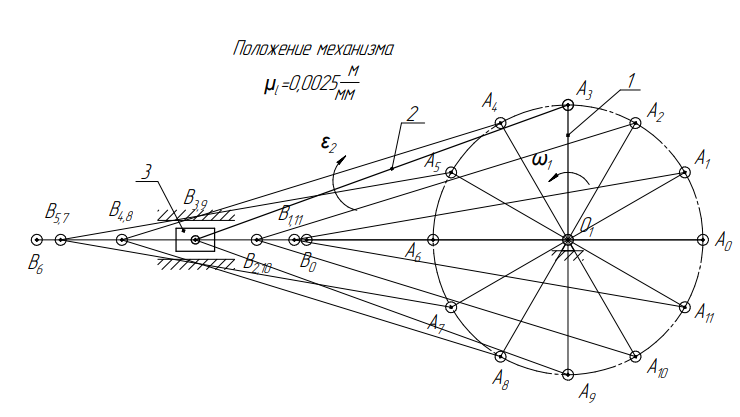
Рисунок 1 – План положений механизма
2.2. Построение планов скоростей
Определяем линейную скорость точки А:

где

- длина звена ОА, м.
Угловая скорость начального звена:


Определяем масштабный коэффициент:

где
 - масштабный коэффициент плана скоростей,
- масштабный коэффициент плана скоростей, 
 – длина вектора скорости точки A, мм.
– длина вектора скорости точки A, мм.Определим скорость точки B. Точка B принадлежит звеньям 2 и 3.
Скорость точки B0 равна нулю. Скорость точки A известна.
Находим скорость точки B графическим методом.
Из построенного плана скоростей вычисляем абсолютные скорости точек:



Угловые скорости звеньев:
Направление угловой скорости
 определяется направлением относительной скорости
определяется направлением относительной скорости  .
. 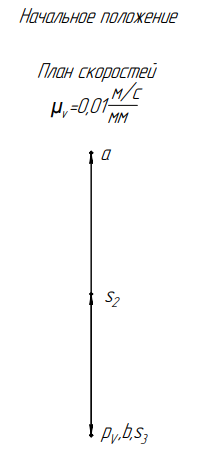
Рисунок 2 – План скоростей для начального положения
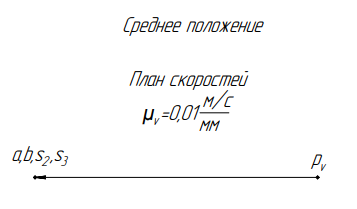
Рисунок 3 – План скоростей для среднего положения
2.3. Построение планов ускорений
Последовательность построения плана ускорений также определяется формулой строения механизма. Вначале определим ускорение точки A начального звена.
Ускорение точки A начального звена ОА:

Ускорение точки А (
 ) будет одинаковым для всех положений механизма. Масштабный коэффициент плана ускорений:
) будет одинаковым для всех положений механизма. Масштабный коэффициент плана ускорений:
Принимаем

.
Тогда длина вектора нормального ускорения точки A будет равна:
Теперь построим план ускорений группы, образованной звеньями 2, 3. Здесь известны ускорения точки А и опоры В0. Запишем два векторных уравнения, рассматривая движение точки B относительно A и относительно опоры B0:
где
 ,
,  – соответственно нормальная и тангенциальная составляющие ускорения в движении точки B относительно точки A;
– соответственно нормальная и тангенциальная составляющие ускорения в движении точки B относительно точки A; – ускорение точки A;
– ускорение точки A; – относительное ускорение точки B относительно точки B0.
– относительное ускорение точки B относительно точки B0.
Тогда:
Из построенного плана ускорений вычи сляем абсолютные ускорения точек:




Определим величины угловых ускорений звеньев:
Направление углового ускорения
 определяется направлением касательного ускорения
определяется направлением касательного ускорения  .
. 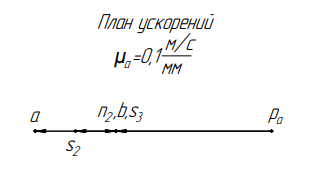
Рисунок 4 – План ускорений для начального положения
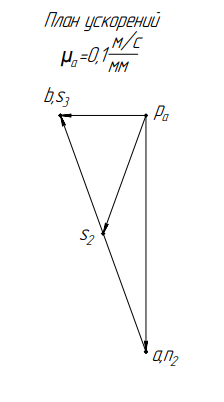
Рисунок 5 – План ускорений для среднего положения
3. Силовой анализ рычажного механизма
Целью силового анализа механизма является определение усилий в звеньях механизма, давлений (реакций) в кинематических парах, величины уравновешивающего момента (или силы), приложенного к ведущему звену. В результате силового расчёта можно определить коэффициент полезного действия, а также мощность, необходимую для его привода.