ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 222
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Q - Hнасоса, приведенную к точке входа жидкости в насос и исправленную на потери во всасывающем трубопроводе.
Подобные расчеты можно произвести и для напорных коммуникаций насосной станции. Введя поправку в приведенную характеристику Q - Hна потери в напорных коммуникациях, получим характеристику Q - H, приведенную к точке выхода напорных водоводов из насосной станции.
в приведенную характеристику Q - Hна потери в напорных коммуникациях, получим характеристику Q - H, приведенную к точке выхода напорных водоводов из насосной станции.
Аналогично можно построить графическую характеристику системы «водоводы – сеть»:
 ,
,
где
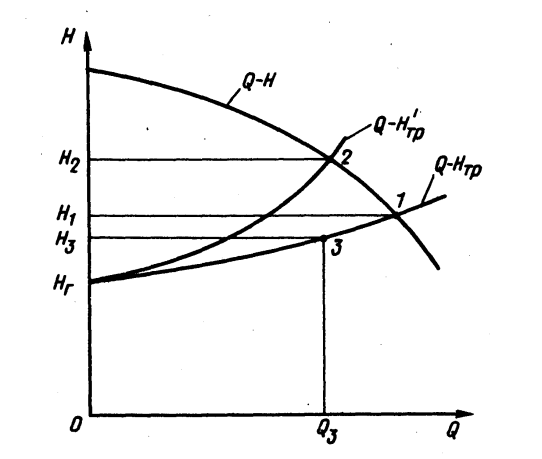
Складывая значения потерь напора, полученные для ряда принятых подач, с геодезической высотой подъема воды, получим графическую характеристику системы «водоводы – сеть» Q – HТР, имеющую форму параболы с вершиной на оси ординат.
Вершина параболы имеет координаты и
и  .
.
Точка 1 пересечения характеристики насоса Q - Hс характеристикой системы Q – HТРявляется режимной точкой работы насоса.
Координаты этой точки соответствуют фактической подаче и фактическому требуемому напору при работе насоса на систему «водоводы – сеть».
1.23. РЕГУЛИРОВАНИЕ РАБОТЫ НАСОСОВ
(регулирование подачи центробежных насосов)
Регулированием работы насоса называется процесс искусственного изменения характеристики трубопровода или насоса для обеспечения работы насоса в требуемой режимной точке, т. е. для сохранения материального и энергетического баланса системы.
Работа системы «насос – сеть» может регулироваться:
1 – й способ
Одним из наиболее распространенных методов изменения характеристики сети является способ дросселирования задвижкой, установленной на напорной линии насоса.
Установка дополнительного оборудования в этом случае не требуется, что является основным достоинством данного способа.
Дроссельное регулирование заключается во введении добавочного сопротивления в напорный трубопровод системы, благодаря чему характеристика сети поднимается более круто
сети поднимается более круто  и пересекает характеристику насоса в режимной точке 2, соответствующей требуемой подаче
и пересекает характеристику насоса в режимной точке 2, соответствующей требуемой подаче  (см. рисунок).
(см. рисунок).
При этом требуемый напор в системе равен , а насос развивает напор
, а насос развивает напор  .
.
Следовательно, энергия, теряемая вследствие увеличения местного сопротивления в задвижке равна:
 ,
, 
где
Полезная мощность насоса для обеспечения работы в точке 3 равна:
 .
.
Затрачиваемая мощность насосной установки в этом случае:
 .
.
Тогда КПД насосной установки:
 ,
,
откуда видно, что КПД насосной установки уменьшается с увеличением разности между напором, развиваемым насосом, и напором, требуемым в сети.
Из-за существенных недостатков (неэкономичность и возможность регулирования только в сторону уменьшения подачи) способ дроссельного регулирования можно применять только на имеющих плавную характеристику небольших насосных агрегатах, где регулирование требуется в течение короткого времени.
2 –й способ
Для устранения неустойчивой работы насосов применяют регулирование подачи насоса перепуском жидкости из напорной линии во всасывающую линию.
Достоинства способа регулирования:
Недостатки способа регулирования:
В силу большого числа недостатков данный способ не получил распространения в практике городского водоснабжения.
3 –й способ
Способ регулирования подачи впуском воздуха во всасывающий трубопровод.
Достоинства способа регулирования:
- является более экономичным, чем дросселирование.
Недостатки способа регулирования:
4 –й способ
Регулирование режима работы насоса изменением частоты вращения рабочего колеса.
Частоту вращения рабочего колеса насоса можно изменять применением двигателей с переменной частотой вращения:
Короткозамкнутые асинхронные электродвигатели, широко применяемые на насосных станциях, не допускают изменения частоты вращения.
В этом случае для изменения частоты вращения рабочего колеса насоса можно:
Регулирование частоты вращения рабочего колеса насоса при постоянной частоте вращения ротора электродвигателя с помощью гидродинамической передачи (регулируемой гидромуфты)
Рабочими элементами гидромуфты являются:
Оба колеса размещены в общем корпусе и предельно сближены (зазор 3 – 10 мм).
Рабочее колесо центробежного насоса насажено на ведущий вал (электродвигателя).
Колесо турбины закреплено на ведомом валу (валу насоса), соосном с ведущим валом.
При вращении ведущего вала рабочая жидкость, находящаяся в каналах колеса насоса, получает приращение механической энергии и передает ее лопаткам колеса турбины.
При выходе из колеса турбины рабочая жидкость вновь попадает во всасывающие отверстия колеса насоса, и цикл повторяется.
Основным способом регулирования частоты вращения ведомого вала является изменение наполнения рабочего пространства колес гидромуфты жидкостью.
Потери энергии в гидромуфте составляют 2 – 3 %, поэтому полного равенства между частотой вращения ведущего и ведомого вала быть не может.
Разность частоты вращения ведущего и ведомого валов, отнесенная к частоте вращения ведущего вала, называется скольжением гидромуфты S.
 ,
,
где n1 – частота вращения ведущего вала (двигателя);
n2– частота вращения ведомого вала (насоса).
Частота вращения ведомого вала равна:

или .
.
Из последнего выражения следует, что потери энергии в гидромуфте увеличиваются с уменьшением передаточного числа, т. е. они увеличиваются с увеличением глубины регулирования.
Достоинства гидравлических муфт:
Недостатки гидравлических муфт:
Регулирование включением сопротивления в цепь ротора асинхронного электродвигателя и регулирование с помощью гидромуфты экономически равноценны.
Регулирование частоты вращения рабочего колеса насоса электромагнитными муфтами скольжения (ЭМС)
Электромагнитная муфта состоит из двух вращающихся частей – индуктора и якоря. Якорь жестко закреплен с валом электродвигателя, имеющим постоянную частоту вращения, а индуктор с валом насоса.
При отсутствии электротока в обмотке индуктора крутящий момент электродвигателя не передается на вал насоса. При включении индуктора возникает электромагнитное поле, под воздействием которого индуктор с некоторым скольжением вращается вслед за якорем и передает крутящий момент от электродвигателя рабочему колесу насоса. Частота вращения индуктора зависит от силы тока возбуждения.
В нашей стране выпускаются ЭМС:
В системах ВиВ наиболее приемлемы ЭМС индукторного типа, для которых КПД может достигать 0,98.
Выводы:
Применение входных направляющих аппаратов экономически целесообразно и конструктивно осуществимо на крупных насосных агрегатах в системах, где статический напор составляет незначительную часть напора насоса.
Геометрическая высота подъема воды насосов, устанавливаемых на насосных станциях 1 – го подъема, зависит от разности уровней воды в источнике и в смесителе водопроводных очистных сооружений.
Уровень воды в поверхностных источниках не остается постоянным в течение года.
Рассмотрим режим работы насоса при изменении уровня воды в источнике от минимального уровня до максимального уровня.
Подобные расчеты можно произвести и для напорных коммуникаций насосной станции. Введя поправку
в приведенную характеристику Q - Hна потери в напорных коммуникациях, получим характеристику Q - H, приведенную к точке выхода напорных водоводов из насосной станции. Аналогично можно построить графическую характеристику системы «водоводы – сеть»:
,где
Складывая значения потерь напора, полученные для ряда принятых подач, с геодезической высотой подъема воды, получим графическую характеристику системы «водоводы – сеть» Q – HТР, имеющую форму параболы с вершиной на оси ординат.
Вершина параболы имеет координаты
и .Точка 1 пересечения характеристики насоса Q - Hс характеристикой системы Q – HТРявляется режимной точкой работы насоса.
Координаты этой точки соответствуют фактической подаче и фактическому требуемому напору при работе насоса на систему «водоводы – сеть».
1.23. РЕГУЛИРОВАНИЕ РАБОТЫ НАСОСОВ
(регулирование подачи центробежных насосов)
Регулированием работы насоса называется процесс искусственного изменения характеристики трубопровода или насоса для обеспечения работы насоса в требуемой режимной точке, т. е. для сохранения материального и энергетического баланса системы.
Работа системы «насос – сеть» может регулироваться:
-
изменением характеристики сети; -
изменением частоты вращения рабочего колеса насоса; -
изменением геометрии проточных каналов насоса; -
изменением кинематики потока на входе в рабочее колесо.
1 – й способ
Одним из наиболее распространенных методов изменения характеристики сети является способ дросселирования задвижкой, установленной на напорной линии насоса.
Установка дополнительного оборудования в этом случае не требуется, что является основным достоинством данного способа.
Дроссельное регулирование заключается во введении добавочного сопротивления в напорный трубопровод системы, благодаря чему характеристика
сети поднимается более круто и пересекает характеристику насоса в режимной точке 2, соответствующей требуемой подаче (см. рисунок). При этом требуемый напор в системе равен
, а насос развивает напор . Следовательно, энергия, теряемая вследствие увеличения местного сопротивления в задвижке равна:
, где
Полезная мощность насоса для обеспечения работы в точке 3 равна:
.Затрачиваемая мощность насосной установки в этом случае:
.Тогда КПД насосной установки:
,откуда видно, что КПД насосной установки уменьшается с увеличением разности между напором, развиваемым насосом, и напором, требуемым в сети.
Из-за существенных недостатков (неэкономичность и возможность регулирования только в сторону уменьшения подачи) способ дроссельного регулирования можно применять только на имеющих плавную характеристику небольших насосных агрегатах, где регулирование требуется в течение короткого времени.
2 –й способ
Для устранения неустойчивой работы насосов применяют регулирование подачи насоса перепуском жидкости из напорной линии во всасывающую линию.
Достоинства способа регулирования:
-
перепуск жидкости улучшает кавитационные качества насоса.
Недостатки способа регулирования:
-
наличие циркуляции снижает КПД системы; -
требуется устройство циркуляционного трубопровода; -
требуется установка дополнительной арматуры; -
усложняется компоновка машинного зала насосной станции.
В силу большого числа недостатков данный способ не получил распространения в практике городского водоснабжения.
3 –й способ
Способ регулирования подачи впуском воздуха во всасывающий трубопровод.
Достоинства способа регулирования:
- является более экономичным, чем дросселирование.
Недостатки способа регулирования:
-
позволяет только ограниченно изменять подачу из-за резкого ухудшения кавитационных качеств насоса; -
в системах водоснабжения этот способ вообще не применим, так как нельзя подавать в сеть воду, смешанную с большим объемом воздуха.
4 –й способ
Регулирование режима работы насоса изменением частоты вращения рабочего колеса.
Частоту вращения рабочего колеса насоса можно изменять применением двигателей с переменной частотой вращения:
-
электродвигатели постоянного тока; -
электродвигатели переменного тока с переключением обмотки на различное число пар полюсов; -
коллекторные электродвигатели; -
паровые и газовые турбины; -
двигатели внутреннего сгорания.
Короткозамкнутые асинхронные электродвигатели, широко применяемые на насосных станциях, не допускают изменения частоты вращения.
В этом случае для изменения частоты вращения рабочего колеса насоса можно:
-
соединить насос и электродвигатель с помощью регулируемой гидромуфты; -
соединить насос и электродвигатель с помощью регулируемой электромагнитной муфты скольжения (ЭМС); -
применить асинхронный двигатель с вентильнокаскадным преобразователем; -
ввести сопротивление (реостат) в цепь фазного ротора асинхронного электродвигателя переменного тока; -
применить асинхронные электродвигатели, имеющих обмотку на статоре, которая переключается во время работы двигателя на различное число пар полюсов. Двигатели этого типа выпускают двух-, трех- и четырехскоростными; -
изменять частоту тока для изменения частоты вращения ротора асинхронного электродвигателя.
Регулирование частоты вращения рабочего колеса насоса при постоянной частоте вращения ротора электродвигателя с помощью гидродинамической передачи (регулируемой гидромуфты)
Рабочими элементами гидромуфты являются:
-
колесо центробежного насоса; -
колесо турбины.
Оба колеса размещены в общем корпусе и предельно сближены (зазор 3 – 10 мм).
Рабочее колесо центробежного насоса насажено на ведущий вал (электродвигателя).
Колесо турбины закреплено на ведомом валу (валу насоса), соосном с ведущим валом.
При вращении ведущего вала рабочая жидкость, находящаяся в каналах колеса насоса, получает приращение механической энергии и передает ее лопаткам колеса турбины.
При выходе из колеса турбины рабочая жидкость вновь попадает во всасывающие отверстия колеса насоса, и цикл повторяется.
Основным способом регулирования частоты вращения ведомого вала является изменение наполнения рабочего пространства колес гидромуфты жидкостью.
Потери энергии в гидромуфте составляют 2 – 3 %, поэтому полного равенства между частотой вращения ведущего и ведомого вала быть не может.
Разность частоты вращения ведущего и ведомого валов, отнесенная к частоте вращения ведущего вала, называется скольжением гидромуфты S.
,где n1 – частота вращения ведущего вала (двигателя);
n2– частота вращения ведомого вала (насоса).
Частота вращения ведомого вала равна:
или
.Из последнего выражения следует, что потери энергии в гидромуфте увеличиваются с уменьшением передаточного числа, т. е. они увеличиваются с увеличением глубины регулирования.
Достоинства гидравлических муфт:
-
бесступенчатое, автоматическое и быстрое изменение частоты вращения ведомого вала.
Недостатки гидравлических муфт:
-
уменьшение КПД при увеличении глубины регулирования; -
они конструктивно более сложны, чем насосы; -
они имеют большие размеры, соизмеримые с размерами насосов.
Регулирование включением сопротивления в цепь ротора асинхронного электродвигателя и регулирование с помощью гидромуфты экономически равноценны.
Регулирование частоты вращения рабочего колеса насоса электромагнитными муфтами скольжения (ЭМС)
Электромагнитная муфта состоит из двух вращающихся частей – индуктора и якоря. Якорь жестко закреплен с валом электродвигателя, имеющим постоянную частоту вращения, а индуктор с валом насоса.
При отсутствии электротока в обмотке индуктора крутящий момент электродвигателя не передается на вал насоса. При включении индуктора возникает электромагнитное поле, под воздействием которого индуктор с некоторым скольжением вращается вслед за якорем и передает крутящий момент от электродвигателя рабочему колесу насоса. Частота вращения индуктора зависит от силы тока возбуждения.
В нашей стране выпускаются ЭМС:
-
асинхронные; -
панцирные; -
индукторные; -
порошковые.
В системах ВиВ наиболее приемлемы ЭМС индукторного типа, для которых КПД может достигать 0,98.
Выводы:
-
Применение регулируемого привода значительно повышает экономические показатели насосных станций – экономия электроэнергии достигает 10 – 15 %. -
Применение регулируемого центробежного насоса позволяет уменьшить число насосов на насосных станциях. -
На группу из трех – четырех рабочих насосов достаточно иметь один регулируемый насос. -
Из существующих способов регулирования электропривода имеют приоритет:
-
привод с ЭМС индукторного типа (для средних и малых агрегатов); -
каскадные приводы различных типов (для мощных агрегатов); -
многоскоростные электродвигатели; -
частотное регулирование (для средних и малых агрегатов).
Применение входных направляющих аппаратов экономически целесообразно и конструктивно осуществимо на крупных насосных агрегатах в системах, где статический напор составляет незначительную часть напора насоса.
-
ВЛИЯНИЕ ГИДРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ВОДОИСТОЧНИКА НА РЕЖИМ РАБОТЫ НАСОСОВ
Геометрическая высота подъема воды насосов, устанавливаемых на насосных станциях 1 – го подъема, зависит от разности уровней воды в источнике и в смесителе водопроводных очистных сооружений.
Уровень воды в поверхностных источниках не остается постоянным в течение года.
Рассмотрим режим работы насоса при изменении уровня воды в источнике от минимального уровня до максимального уровня.