Файл: Вид работы Курсовая работа Название дисциплины Электрический привод Тема Расчет механических характеристик и тормозных сопротивлений асинхронного электродвигателя в тормозных режимах.doc
Добавлен: 11.12.2023
Просмотров: 73
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Основные данные о работе
| Версия шаблона | 3.1 |
| Вид работы | Курсовая работа |
| Название дисциплины | Электрический привод |
| Тема | Расчет механических характеристик и тормозных сопротивлений асинхронного электродвигателя в тормозных режимах |
| Фамилия студента | Плэннэ |
| Имя студента | Сергей |
| Отчество студента | Олегович |
| № контракта | 022061913030257004 |
Содержание
Введение 3
1 Генераторное торможение асинхронных двигателей с отдачей энергии
в сеть…………………………………………………………………………….5
2 Торможение противовключением асинхронного двигателя………………9
3 Динамическое торможение асинхронных двигателей…………………….12
Заключение 20
Глоссарий 22
Список использованных источников 24
Список сокращений 26
Приложения 27
Введение
Наибольшее распространение получили асинхронные двигатели, причем из всех электрических двигателей они являются самыми распространенными. Преимущества асинхронного двигателя состоят в простоте устройства, изготовления и эксплуатации, а также в большой надежности и сравнительно низкой стоимости. Широкое применение находит трехфазный асинхронный двигатель. Используют также однофазный асинхронный двигатель. Трехфазные двигатели применяют во всех отраслях народного хозяйства, однофазные - в основном в схемах автоматики, для привода электроинструмента, бытовых машин и т.п.
Промышленность выпускает асинхронные двигатели на рабочее напряжение от 127 В до 10 кВ, мощностью от долей ватта до нескольких тысяч киловатт. Однофазные асинхронные двигатели имеют мощность, как правило, не превышающую 0,5 кВт. Двигатели максимальной мощности изготовляются на напряжение 6-10 кВ. При частоте 50 Гц синхронная частота вращения двигателей различного типа колеблется от 500 до 3000 об/мин.
Кроме асинхронных двигателей, преобразующих электрическую энергию переменного тока в механическую энергию, имеются асинхронные машины, выполняющие функции преобразователя частоты, регулятора напряжения и фазорегулятора.
Асинхронный двигатель может работать в следующих тормозных режимах:
1) генераторное торможение с отдачей энергии в сеть;
2) торможение противовключением;
3) динамическое торможение.
Все перечисленные способы применимы принципиально как к двигателю с фазным ротором, так и короткозамкнутым ротором.
Целью курсовой работы является расчет механических характеристик и тормозных сопротивлений асинхронного электродвигателя в тормозных режимах.
Для достижения данной цели были поставлены такие задачи, как:
- изучить способы торможения асинхронного двигателя;
- изучить особенности расчета механических характеристик и тормозных сопротивлений асинхронного электродвигателя в тормозных режимах.
При написании курсовой работы использованы учебные пособия по электротехнике и электронике.
Основная часть
1 Генераторное торможение асинхронных двигателей с отдачей энергии в сеть
Как все электрические машины, асинхронная машина, обратима. Если к валу асинхронной машины приложен тормозной статический момент, то она, преодолевая внешний момент, работает как двигатель и потребляет мощность из сети. Если внешний статический момент на валу двигателя отсутствует, то двигатель, подключенный к сети, будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если же с помощью первичного двигателя вращать ротор с синхронной скоростью, то есть будет покрывать только потери статора, а потери ротора (механические и в стали) будут покрываться первичным двигателем.
Рассмотрим работу двигателя при скорости выше синхронной. В этом случае ротор будет вращаться со скоростью большей, чем скорость магнитного поля. Это приводит к изменению направления пересечения обмоток ротора магнитными силовыми линиями поля статора (в двигательном режиме ротор отставал от поля статора). Следовательно, изменится направление ЭДС, наводимой в статоре, и направление статорного тока, т.е. теперь энергия будет отдаваться в сеть.
Указанное явление можно объяснить векторной диаграммой АД в генераторном режиме, представленной на рис. 4.10. При переходе в генераторный режим ЭДС ротора меняет свой знак Е2=Е2·S, т.к. приведенный ток ротора в этом случае
т.е.
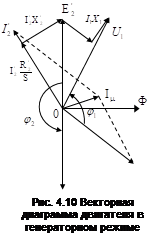 В двигательном режиме S>0 и составляющие
В двигательном режиме S>0 и составляющие В генераторном режиме S<0. При этом
Двигатель переходит в генераторный режим. Электромагнитный момент также меняет свой знак и он становится тормозным. Следовательно, двигатель работает уже генератором параллельно с сетью, и отдает электрическую энергию, потребляя при этом реактивную мощность для возбуждения. Следует заметить, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную энергию из сети, т.е. генераторный режим возможен только при наличии сети, которая способна снабжать асинхронный генератор реактивной мощностью, необходимой для создания магнитного поля.
Часто характеристики, соответствующие генераторному скольжению, будут располагаться во втором квадрате (II). Поэтому данному режиму будут соответствовать значения скольжения от “0” до “-
Торможение с рекуперацией энергии в сеть используется в подъемно транспортных устройствах при спуске тяжелых грузов. Под действием опускающегося груза асинхронная машина начинает вращаться со скоростью
 Для этого, чтобы обеспечить нормальный тормозной спуск груза статический момент не должен превосходить критического момента машины в генераторном режиме.
Для этого, чтобы обеспечить нормальный тормозной спуск груза статический момент не должен превосходить критического момента машины в генераторном режиме.Если на валу механизма имеется реактивный, статический момент, то торможение с рекуперацией энергии в сеть возможно только в случае использование асинхронного двигателя с переключением числа пар полюсов.
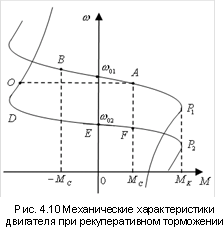
Предположим, что обмотки статора включены таким образом, что они обеспечивают меньшее число пар полюсов, т.е. двигатель работает в точка А, на высшей скорости
Если обмотки переключить на меньшее число пар полюсов p2, то двигатель перейдёт работать в точку В на характеристику 2, проходящую через точку
Скорость вращения двигателя при переключении окажется больше синхронной скорости, соответствующей новому числу полюсов, т.е.
Машина перейдет в режим генератора. На рис. 4.10 область с отдачей энергии в сеть соответствует участку ВСД механической характеристики.
Этот процесс применяется (имеет место) например в приводах металлорежущих станков при переключении скоростей двигателя.
2 Торможение противовключением асинхронного двигателя
Значительно большее применение на практике имеет торможение противовключением.
· Торможение противовключением посредством включения значительного по величине сопротивления в цепь ротора.
Режим противовключения можно получить в том случае, если обмотка статора будет включена для одного направления вращения, а ротор под действием внешнего момента или по инерции будет вращаться в противоположном направлении. Этот режим может иметь место в подъемно – транспортных установках при спуске груза, когда статор двигается включен для работы на подъем, а ротор под действием момента от груза вращается в противоположном направлении.
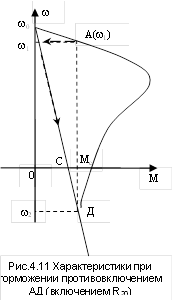 При неподвижном роторе (f2=f1) его ток достигает 5 – 6 кратного значения. При противовключении, когда
При неподвижном роторе (f2=f1) его ток достигает 5 – 6 кратного значения. При противовключении, когда Недостатком данных характеристик является их большая крутизна, трудность получения малых скоростей опускания груза, и возможность значительного колебания скорости спуска при незначительном изменении веса груза. Несмотря на это данный вид торможения применяется широко.
· Торможение противовключением изменением порядка чередования фаз статора АД
Наиболее часто режим противовключения применяется для быстрой остановки двигателя. Для перехода из двигательного режима в режим противовключения необходимо переключить две фазы статора. Вращающееся поле статора при этом изменит направление вращения, а ротор по инерции будет вращаться в прежнем направлении. Машина перейдет в режим противовключения.
При этом ток и момент изменяют свой знак. Момент станет тормозным и двигатель быстро остановится. Механическая характеристика такого режима противовключения показа на рис. 4.12. Режим противовключения соответствует участку ВС механической характеристики.
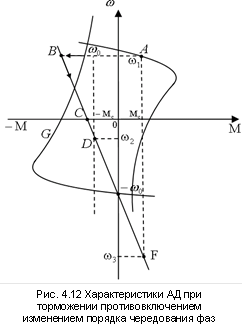 Для того, чтобы остановить двигатель, нужно отключить его от сети при достижении скорости, равной нулю. Если же его не отключить, то произойдет реверс двигателя и он увеличит свою скорость в противоположном направлении до установившегося состояния.
Для того, чтобы остановить двигатель, нужно отключить его от сети при достижении скорости, равной нулю. Если же его не отключить, то произойдет реверс двигателя и он увеличит свою скорость в противоположном направлении до установившегося состояния.