Добавлен: 09.01.2024
Просмотров: 146
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2. Кинематический анализ рычажного механизма графоаналитическим методом
3. Кинематический анализ рычажного механизма аналитическими методами
4.Силовой анализ рычажного механизма графо - аналитическим методом
3.Кинематический анализ комбинированного зубчатого механизма графо - аналитическим методом
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
федеральное государственное бюджетное образовательное учреждение высшего образования «Казанский национальный исследовательский
технический университет им. А.Н. Туполева-КАИ»
(КНИТУ-КАИ)
Институт авиации, наземного транспорта и энергетики
15.03.06 Конструкторско – технологическое обеспечение машиностроительных производств
Курсовая работа
по дисциплине: «Теория машин и механизмов»
На тему
«Кинематический и силовой анализ механизмов»
Обучающийся 1201_______ Хамидуллин С.З.
(номер группы) (подпись, дата) (Ф.И.О.)
Руководитель Доцент Филонов Н.В.
(должность) (Ф.И.О.)
Курсовая работа зачтена с оценкой ________________
___________________
(подпись, дата)
Казань, 2022 г.
Аннотация
В данной курсовой работе исследуются рычажные и зубчатые механизмы.
В первой части курсовой работы “Кинематический и силовой анализ рычажных механизмов” производится исследование привода воздушного компрессора в виде кривошипно-ползунного механизма с параметрами: ход ползуна (Sb)- 0,032м; длина шатуна(L2)- 0,096м; угловая скорость кривошипа (ω1)= 180 рад/с; масса шатуна (m2)= 0.07 кг; масса ползуна (m3)= 0.105 кг; сила сопротивлению движения ползуна (Fc )= 130 H.
Во второй части курсовой работы “Кинематический синтез и анализ комбинированного редуктора” рассматривается синтез зубчатого двухступенчатого редуктора при заданных числах оборотов на входе n_дв= 1500 об/мин; выходе n= 170 об/мин и модуле зубчатых колес m= 4 мм. По определенным в результате синтеза числам зубьев колес редуктора найдены диаметры делительных окружностей колес и проведен кинематический анализ.
Annotation
In this research work the lever and gear mechanisms are being explored.
In the first part of the research work “Kinematic and force analysis of lever mechanisms”, the study of an air compressor drive in the form of a slide crank mechanism with parameters is carried out: slide stroke (Sb) - 0.032 m; rod length (L2) - 0.096 m; crank angular velocity (ω1) = 180 rad / s; rod weight (m2) = 0.07 kg; mass of the ram (m3) = 0.105 kg; strength of resistance to movement of the slide (Fc) = 130 H.
In the second part of the course work “Kinematic Synthesis and Analysis of the Combined Reducer”, the synthesis of a two-stage gear reducer is excused at a given speed of input n = 1500 rpm; output n = 170 rpm and gear module m = 4 mm. The diameters of the pitch circles of the wheels were found and the kinematic analysis was carried out using the numbers of gear teeth of the gearbox determined as a result of the synthesis.
Содержание
Часть 1. Кинематический и силовой анализ рычажного механизма
1.Исходное задание 2
2. Кинематический анализ рычажного механизма графоаналитическим методом 3
3. Кинематический анализ рычажного механизма аналитическими методами 8
4.Силовой анализ рычажного механизма графо - аналитическим методом 11
5. Рычаг Жуковского 15
1.Исходное задание 15
2.Подбор чисел зубьев колес комбинированного зубчатого механизма 17
3.Кинематический анализ комбинированного зубчатого механизма графо - аналитическим методом 19
Список литературы 22
-
Исходное задание
Привод воздушного компрессора
 |  |  |  |  |  |  |  |
| 0.032 | 180 | 0.096 | 0.07 | 0.105 | 130 | 0.048 | 50° |
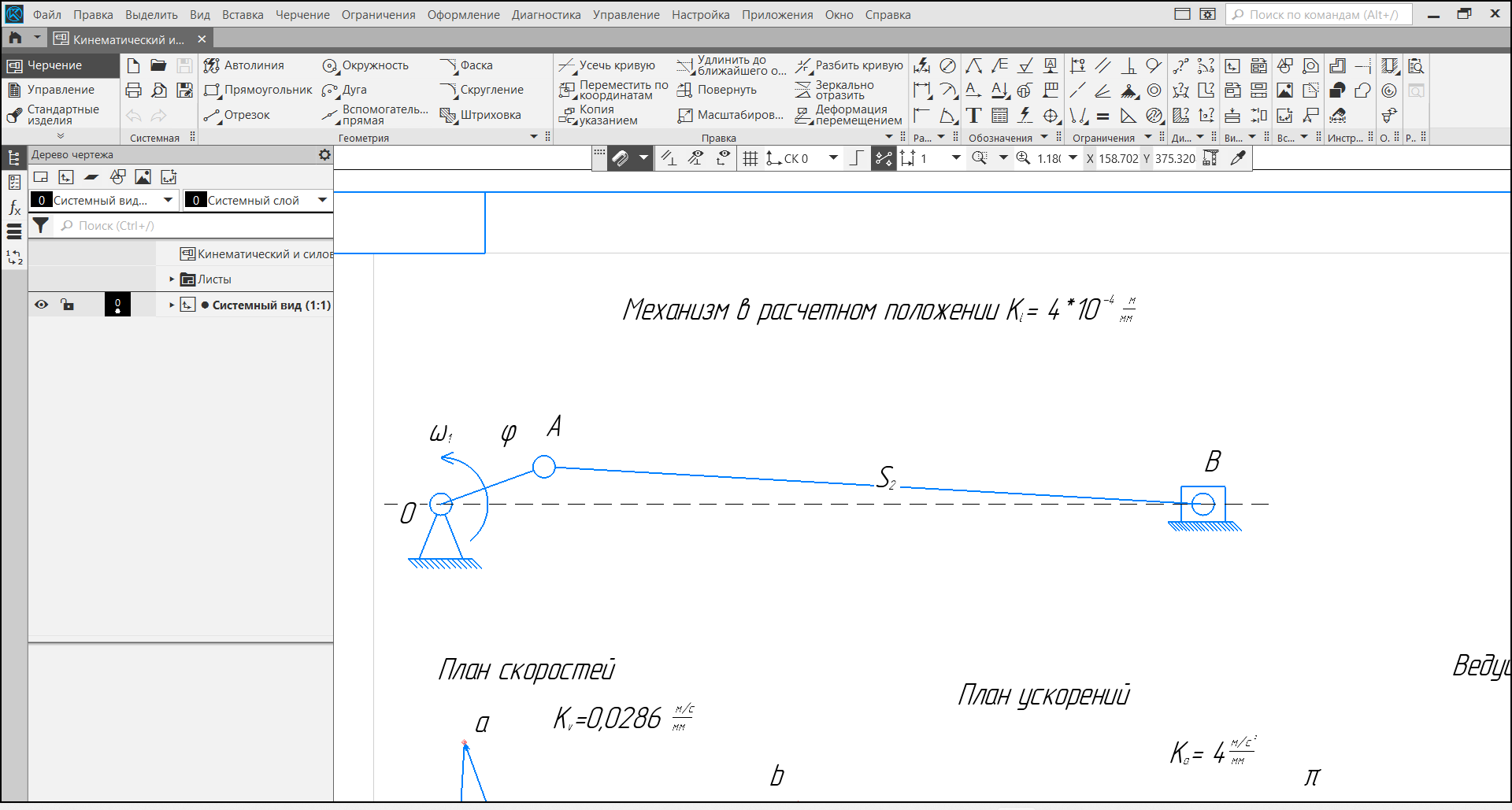
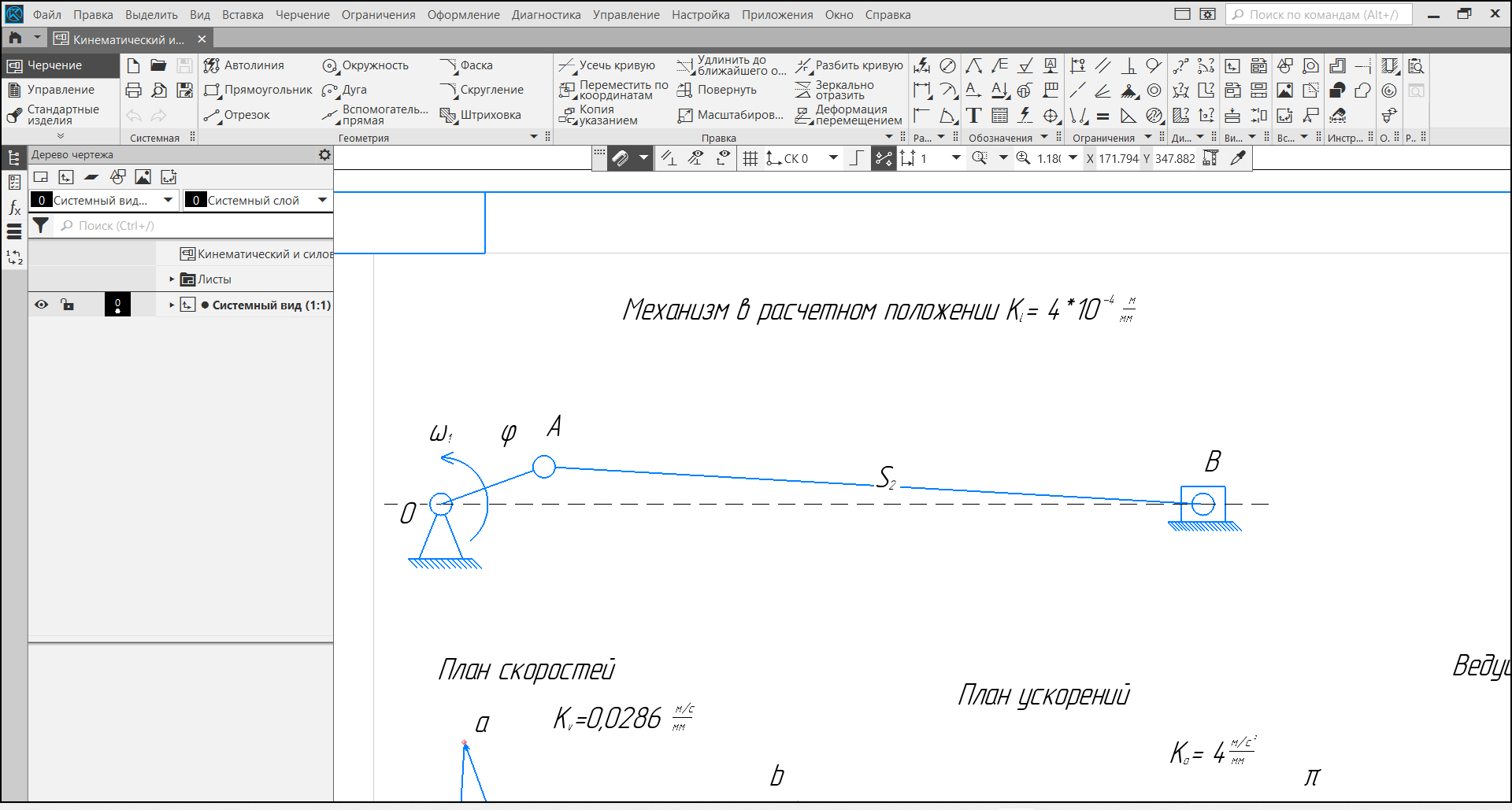
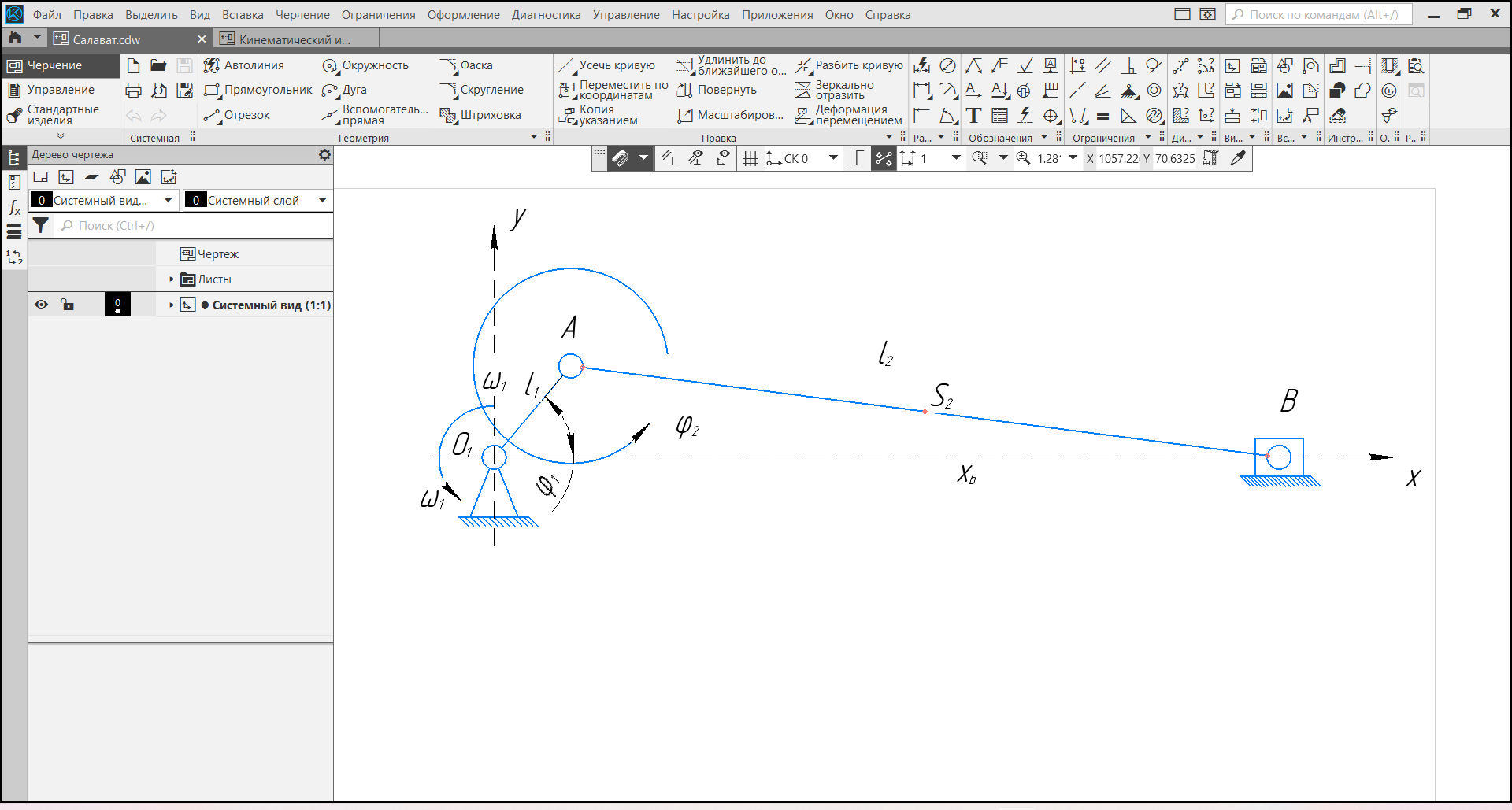
2. Кинематический анализ рычажного механизма графоаналитическим методом
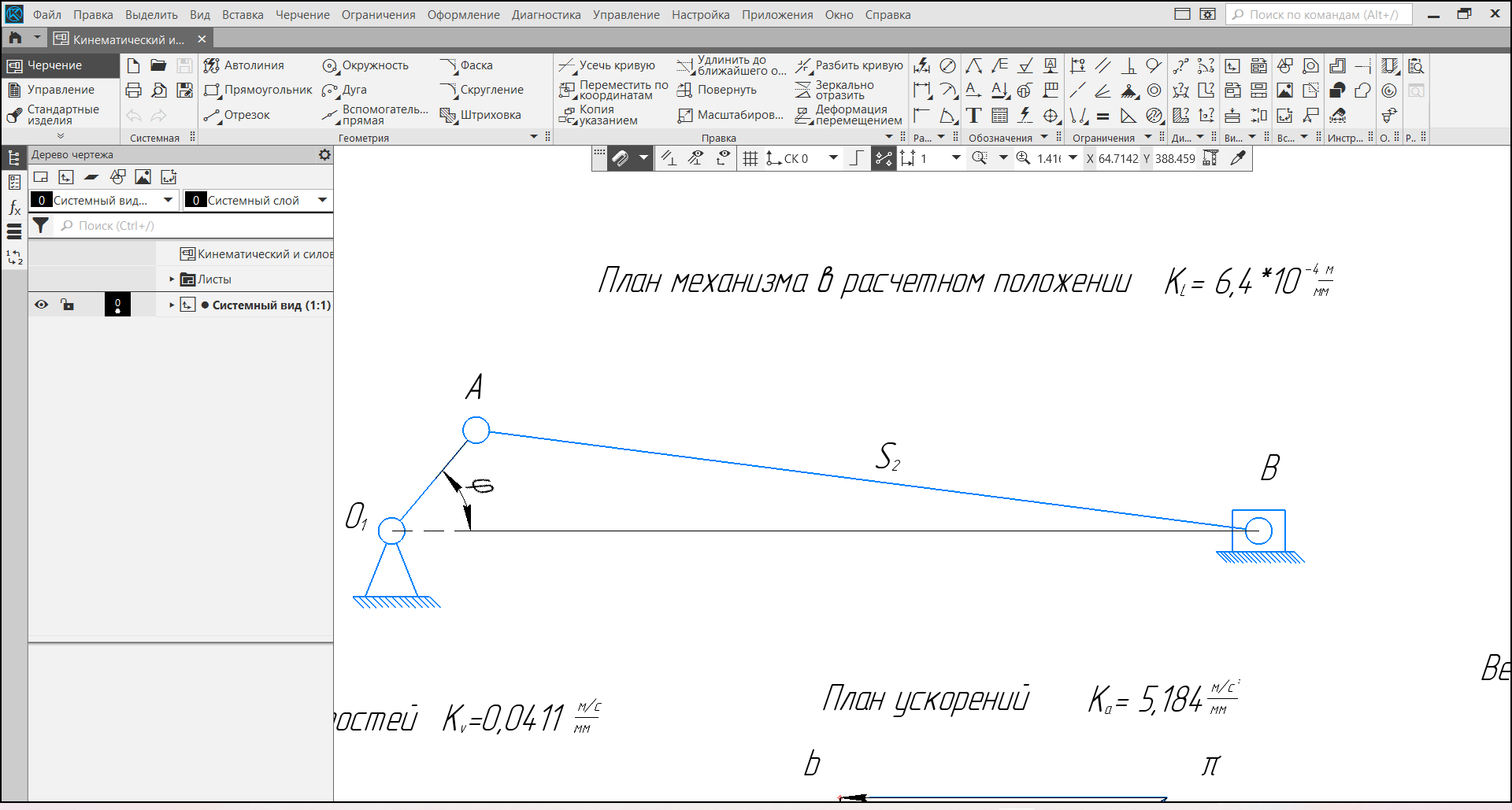
План механизма:
А) Определение длины кривошипа ОА
Б) Определение масштабного коэффициента плана механизма:

В) Определение длины шатуна АВ на чертеже:
Г) Построение плана механизма в расчетном положении:
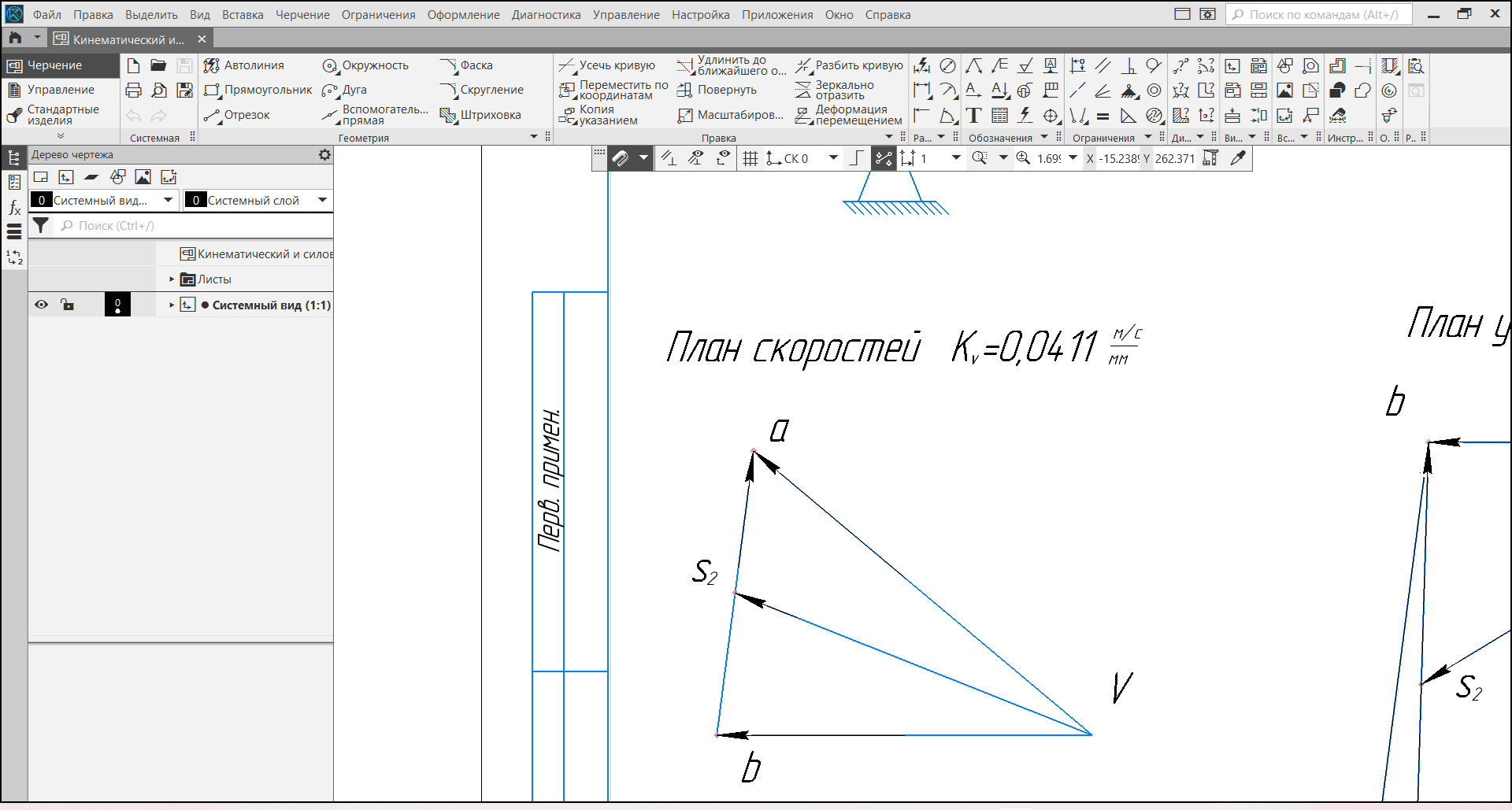
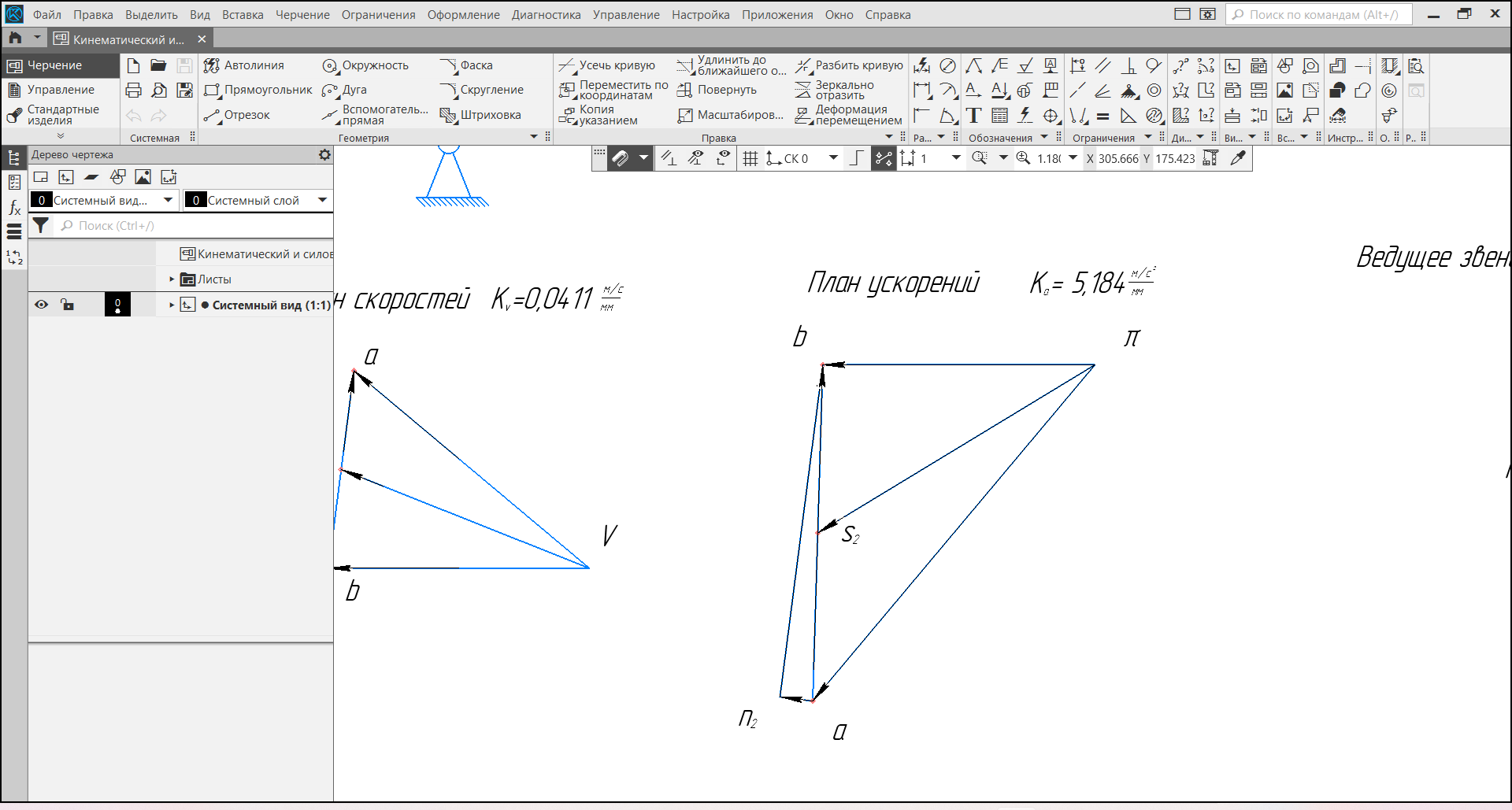
План скоростей:
А) Определение линейных скоростей точки А кривошипа:

Б) Определение масштабного коэффициента плана скоростей:

В) Векторное уравнение плана скоростей

 – направление по горизонтали
– направление по горизонтали 
 – направлена ⟂
– направлена ⟂
 , т.е.
, т.е. 
 – направлена ⟂
– направлена ⟂
Г) Построение плана скоростей:
 ;
; 
Д) Определение линейных и угловых скоростей звеньев и точек механизмов:



План ускорений:
А) Определение линейных ускорений точек механизма:


Б)Определение масштабного коэффициента плана ускорений:
 , где
, где 
В) Векторное уравнение плана ускорений:

 – направлено по горизонтали
– направлено по горизонтали - направлено по ║O1A
- направлено по ║O1A -направлено по ⟂O1A (равно O1т.к.
-направлено по ⟂O1A (равно O1т.к.  =const)
=const) – направлено по ⟂AB
– направлено по ⟂AB - направлено по ║AB
- направлено по ║AB
Г) Построение плана ускорений:
 ,
, 
Д) Определение линейных и угловых ускорений звеньев и точек механизма:



3. Кинематический анализ рычажного механизма аналитическими методами
Векторное уравнение механизма:
 (1)
(1)Спроецируем векторное уравнение на оси координат:
 (2)
(2) (3)
(3)Из (2)

Из (3)

Для определения линейных и угловых скоростей звеньев и точек механизма, продифференцируем систему уравнений (2), (3) и решим относительно неизвестных.

(4)
 (5)
(5)В уравнении (4), (5):
 , аналогично:
, аналогично: ,
, 
Из уравнения (4) получим:

Из уравнения (5) получим:

Для определения линейных и угловых ускорений звеньев и точек механизма продифференцируем по времени систему уравнений (4), (5) и полученную новую систему решим относительно неизвестных.
Дифференцируем уравнение (4):
 *
* =
= (6)
(6)Дифференцируем уравнение(5):
 * =
* = (7)
(7)В уравнениях (6), (7)
 ;
; =
= ;
;  ;
; 
Из уравнения (6):

Из уравнения (7):
 =
=
Определим по полученным формулам линейные и угловые скорости и ускорения для расчетного положения механизма при:
 ,
,  ,
, ,
, 
Для определения кинематических параметров центра масс шатуна – в точке
 запишем ее координаты в правой системе координат:
запишем ее координаты в правой системе координат: