ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.04.2024
Просмотров: 100
Скачиваний: 1
![]()
где ![]() —
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
—
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
(В пределе
количество частиц может быть бесконечным,
например, в случае твердого тела с
непрерывно распределенной массой или
вообщераспределенной
системы это
может быть записано как ![]() где
где ![]() —
импульс бесконечно малого точечного
элемента системы).
—
импульс бесконечно малого точечного
элемента системы).
В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с.
Из определения момента импульса следует его аддитивность: как, для системы частиц в частности, так и для системы, состоящей из нескольких подсистем, выполняется:
![]() .
.
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная векторному произведению радиус-вектора, (проведенного от оси вращения к точке приложения силы — по определению), на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют всопротивлении материалов).
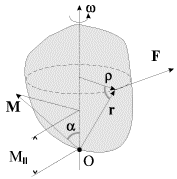
10) Динамика вращательного движения материальной точки. Рассмотрим частицу массы m, вращающуюся вокруг токи О по окружности радиуса R, под действием результирующей силы F (см. рис. 6.5). В инерциальной системе отсчета справедлив 2ой закон Ньютона. Запишем его применительно к произвольному моменту времени:
F = m·a.
Нормальная составляющая силы не способна вызвать вращения тела, поэтому рассмотрим только действие ее тангенциальной составляющей. В проекции на тангенциальное направление уравнение движения примет вид:
F= m·a.
Поскольку a = ·R, то
F= m··R(6.6)
Умножив левую и правую части уравнения скалярно на R, получим:
F·R= m··R2 (6.7) M = I· (6.8)
Уравнение (6.8) представляет собой 2ой закон Ньютона (уравнение динамики) для вращательного движения материальной точки. Ему можно придать векторный характер, учитывая, что наличие момента сил вызывает появление параллельного ему вектора углового ускорения, направленного вдоль оси вращения (см. рис. 6.5):
M = I· (6.9)
Основной закон динамики материальной точки при вращательном движении можно сформулировать следующим образом:
произведение момента инерции на угловое ускорение равно результирующему моменту сил, действующих на материальную точку.
11) Вращение твердого тела вокруг неподвижной оси.
В этом случае движение твердого тела определяется уравнением
|
|
Здесь ![]() -
это момент импульса относительно оси
вращения, то есть проекция на ось момента
импульса, определенного относительно
некоторой точки, принадлежащей оси .
-
это момент импульса относительно оси
вращения, то есть проекция на ось момента
импульса, определенного относительно
некоторой точки, принадлежащей оси .![]() -
это момент внешних сил относительно
оси вращения, то есть проекция на ось
результирующего момента внешних сил,
определенного относительно некоторой
точки, принадлежащей оси, причем выбор
этой точки на оси, как и в случае
с
-
это момент внешних сил относительно
оси вращения, то есть проекция на ось
результирующего момента внешних сил,
определенного относительно некоторой
точки, принадлежащей оси, причем выбор
этой точки на оси, как и в случае
с ![]() значения
не имеет. Действительно (рис. 3.4),
значения
не имеет. Действительно (рис. 3.4), ![]() где
где ![]() -
составляющая силы, приложенной к твердому
телу, перпендикулярная оси вращения,
-
составляющая силы, приложенной к твердому
телу, перпендикулярная оси вращения, ![]() -
плечо силы
-
плечо силы ![]() относительно
оси.
относительно
оси.
|
|
|
Рис. 3.4. |
Поскольку ![]() (
(![]() -
момент инерции тела относительно оси
вращения), то вместо
-
момент инерции тела относительно оси
вращения), то вместо ![]() можно
записать
можно
записать
|
|
(3.8) |
или
|
|
(3.9) |
поскольку в случае твердого
тела ![]()
Уравнение (3.9) и есть основное уравнение динамики вращательного движения твердого тела вокруг неподвижной оси. Его векторная. форма имеет вид:
|
|
(3.10) |
Вектор ![]() всегда
направлен вдоль оси вращения, а
всегда
направлен вдоль оси вращения, а ![]() -
это составляющая вектора момента силы
вдоль оси.
-
это составляющая вектора момента силы
вдоль оси.
В случае ![]() получаем
получаем ![]() соответственно
и момент импульса относительно
оси
соответственно
и момент импульса относительно
оси ![]() сохраняется.
При этом сам вектор L,
определенный относительно какой-либо
точки на оси вращения, может меняться.
Пример такого движения показан на рис.
3.5.
сохраняется.
При этом сам вектор L,
определенный относительно какой-либо
точки на оси вращения, может меняться.
Пример такого движения показан на рис.
3.5.
|
|
|
Рис. 3.5. |
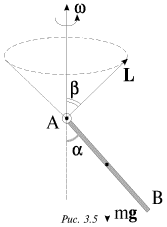
Стержень АВ, шарнирно
закрепленный в точке А, вращается по
инерции вокруг вертикальной оси таким
образом, что угол ![]() между
осью и стержнем остается постоянным.
Вектор момента импульса L,
относительно точки А движется по
конический поверхности с углом
полураствора
между
осью и стержнем остается постоянным.
Вектор момента импульса L,
относительно точки А движется по
конический поверхности с углом
полураствора ![]() однако
проекция L на
вертикальную ось остается постоянной,
поскольку момент силы тяжести относительно
этой оси равен нулю.
однако
проекция L на
вертикальную ось остается постоянной,
поскольку момент силы тяжести относительно
этой оси равен нулю.
12) Момент инерции. Моментом инерции материальной точки массы mотносительно оси называется величина, равная:
I = m·r2, (6.5) где r - кратчайшее расстояние от оси вращения до точки.
Момент инерции твердого тела равен сумме моментов инерции его частей:
I = mi·ri2 (6.6)
Следовательно, момент инерции твердого тела зависит от:
|
|
массы тела; |
|
|
формы и размеров тела; |
|
|
распределения массы относительно оси вращения (при переносе оси вращения или отдельных частей тела его момент инерции изменяется). |
Для симметричных тел момент инерции рассчитывается с помощью интегрального исчисления.
13)
14) Центр масс, центр ине́рции, барице́нтр (от др.-греч. βαρύς — тяжёлый + κέντρον — центр) — (в механике) геометрическая точка, характеризующая движение тела или системы частиц как целого. Не следует путать с центром тяжести.
Положение центра масс (центра инерции) системы материальных точек в классической механике определяется следующим образом:
где
![]() — радиус-вектор центра
масс,
— радиус-вектор центра
масс,
![]() —
радиус-вектор i-й
точки системы,
—
радиус-вектор i-й
точки системы,
![]() — масса i-й
точки.
— масса i-й
точки.
Для случая непрерывного распределения масс:
![]()
где:
![]() —
суммарная
масса системы,
—
суммарная
масса системы,
![]() —
объём,
—
объём,
![]() —
плотность.
—
плотность.
Центр масс, таким образом, характеризует распределение массы по телу или системе частиц.
15)
Теоре́ма Гю́йгенса — Ште́йнера,
или просто теорема
Штейнера (названа
по имени швейцарского математика Якоба
Штейнера и
голландского математика, физика и
астронома Христиана
Гюйгенса): момент
инерции ![]() тела
относительно произвольной оси равен
сумме момента инерции этого
тела
тела
относительно произвольной оси равен
сумме момента инерции этого
тела ![]() относительно
параллельной ей оси, проходящей через
центр масс тела, и произведения массы
тела
относительно
параллельной ей оси, проходящей через
центр масс тела, и произведения массы
тела ![]() на
квадрат расстояния
на
квадрат расстояния ![]() между
осями:
между
осями:
![]()
где
![]() —
известный
момент инерции относительно оси,
проходящей через центр масс тела,
—
известный
момент инерции относительно оси,
проходящей через центр масс тела,