Файл: Контрольные работы. Теория автоматического управления.docx
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Методичка
Дисциплина: Теория автоматического управления
Добавлен: 19.10.2018
Просмотров: 5332
Скачиваний: 88
-
Assertion – Блок проверки утверждений
-
Check Discrete Gradient – Блок контроля градиента дискретного сигнала
-
Check Dynamic Gap – Блок контроля нахождения сигнала вне изменяющейся зоны
-
Check Dynamic Range – Блок контроля нахождения сигнала внутри изменяющейся зоны
-
Check Static Gap – Блок контроля нахождения сигнала вне зоны
-
Check Static Range – Блок контроля нахождения сигнала внутри зоны
-
Check Dynamic Lower Bound – Блок контроля изменяющегося минимального уровня
-
Check Dynamic Upper Bound – Блок контроля изменяющегося максимального уровня
-
Check Input Resolution – Блок контроля разрешающей способности
-
Check Static Lower Bound – Блок контроля минимального уровня сигнала
-
Check Static Upper Bound – Блок контроля максимального уровня сигнала
Model-Wide Utilities – Библиотека дополнительных утилит
-
DocBlock – Блок документации
-
Model Info – Блок информации о модели
-
Timed-Based Linearization – Блок линеаризации
-
Trigger-Based Linearization – Блок линеаризации, управляемой извне
Ports & Subsystems – Порты и подсистемы
-
Configurable Subsystem – Конфигурируемая подсистема
-
Atomic Subsystem – Создание подсистем
-
Enable – Блок управления Enable
-
Enabled Subsystem – Е-подсистема
-
Enabled and Triggered Subsystem – ЕТ-подсистема
-
For Iterator Subsystem – Подсистема, управляемая циклом For
-
Function-Call Generator – Внешний блок управления FC-подсистемой
-
Function-Call Subsystem - FC-подсистема
-
If - Блок условного оператора
-
Action Subsystem – Подсистемы, управляемые блоками If Swith и Case
-
Configurable Subsystem – переконфигурируемая подсистема
-
Subsystem – Создание подсистем
-
Switch Case – Блок переключателя
-
Trigger – Блок управления Trigger
-
Triggered Subsystem –Т-подсистема
-
While Iterator Subsystem – Подсистема, управляющая циклом While
Signal Attributes – Блоки определения свойств
-
Data Type Conversion – Преобразователь типа сигнала
-
IC – Блок установки начального значения
-
Probe – Вывод параметров
-
Rate Transition – Блок согласования дискретных сигналов
-
Signal Specification – Блок спецификации сигнала
-
Width – Блок определения размера сигнала
Signal Routing – Блоки маршрутизации сигналов
-
Bus Creator – Шинный формирователь
-
Bus Selector – Шинный селектор
-
Data Store Memory – Блок создания общей области памяти
-
Data Store Read – Блок считывания из именованной области памяти
-
Data Store Write – Блок записи в именованную область памяти
-
Demux – Демультиплексор
-
From – Блок приема сигнала
-
Goto – Блок передачи сигнала
-
Goto Tag Visibility – Блок признака видимости сигнала
-
Manual Switch – Ручной переключатель
-
Merge – Формирователь векторного сигнала
-
Multiport Switch – Многовходовый переключатель
-
Mux – Мультиплексор
-
Selector – Селектор
-
Switch – Переключатель
Sinks – Приемники сигналов
-
Display – Цифровой дисплей
-
Floating Scope – Изменяющийся осциллограф
-
Outport – Выходной порт
-
Scope – Осциллограф
-
Stop Simulation – Блок остановки моделирования
-
Terminator – Концевой приемник
-
To File – Блок записи в файл
-
To Workspace – Блок записи в рабочую область MATLAB
-
XY Graph – Графопостроитель
Sources-Источники сигналов
-
Band-Limited White Noise – Генератор белого шума
-
Chirp Signal – Генератор сигнала линейно изменяющейся частоты
-
Clock – Источник времени
-
Constant – Постоянная величина
-
Digital Clock – Дискретный источник времени
-
From Workspace - Блок считывания данных из рабочей области MATLAB
-
From File – Блок считывания данных из файла
-
Ground – Формирователь сигнала нулевого уровня
-
Inport – Входной порт
-
Pulse Generator – Источник импульсного сигнала
-
Ramp – Источник линейно изменяющегося сигнала
-
Random Number – Источник случайного сигнала с нормальным распределением
-
Repeating Sequence – Источник периодического сигнала
-
Signal Generator - Генератор сигналов
-
Signal Builder – Конструктор сигналов
-
Sine Wave – Источник синусоидального сигнала
-
Step – Генератор ступенчатого сигнала
-
Uniform Random Number – Источник случайного сигнала с равномерным распределением
User-Defined Functions - Определяемые пользователем функции
-
Fcn – Блок задания функции
-
MATLAB Fcn - Блок задания М-функции
-
S-Function – Блок задания S-функции
-
S-Function Builder – Конструктор S-функции
Режимы работы в MATLAB
Система предусматривает 3 режима вычислений:
-
Режим прямых вычислений (приглашение к работе символом «>>»);
-
Режим работы с m-файлами;
-
Режим работы в Simulink.
Описание режимов работы
Режим прямых вычислений:
-
Запускаем программу Matlab.
-
В появившемся окне под названием “Окно команд” вы можете набрать текст скрипта, после каждой строки нажимая клавишу “Enter”.
-
Каждая введенная строка будет дублироваться в окне “Команды”.
-
По завершению ввода Вы получите результат.
Режим работы с m-файлами:
-
Запускаем программу Matlab.
-
В ниспадающем меню нажимаем кнопки Файл –> Новый –> M-Файл.
-
В открывшемся редакторе Вы можете набрать текст скрипта и проверить его работоспособность во вкладке ниспадающего меню Отладка –> Запуск, либо нажатием клавиши F5.
-
С помощью вкладки Файл вы можете сохранить свой скрипт или открыть уже готовый из файла.
Пример скрипта
% Вычисление переходной характеристики привода элерона самолета
% Вычисление от 0 до 1 с шагом 0.01,
% задается начальное значение времени, интервал расчета и конечное значение времени
t=[0:0.01:1];
%
% Формирование полиномов числителя и знаменателя передаточной функции
num=[1]; den=[0.1 1];
%
% Формирование передаточной функции
sys=tf(num,den);
%
% Находим переходную характеристику во времени
[y,t]=step(sys,t);
%
% Построение графика
plot(t,y)
%
% Обозначение осей абсцисс и ординат
xlabel(‘t’), ylabel(‘y(t)’)
%
% Помещаем над графиком заголовок, grid управляет выводом сетки
title(‘h(t)’), grid
Режим работы в Simulink:
-
Запускаем программу Matlab.
-
Открыть окно библиотек Simulink можно несколькими способами:
-
нажать кнопку Simulink на панели инструментов;
-
последовательностью нажатий кнопок Старт –> Simulink -> Инструмент Simulink –> Обозреватель библиотеки.
В появившемся окне нажимаем Файл –> Новая модель или комбинацию клавиш Ctrl+N.
В редактор переносим из необходимых библиотек элементы и строим нужную модель.
Нажимаем в ниспадающем меню Simulation -> Start или комбинацию клавиш Ctrl+T.
Все операции вы можете произвести с вышеприведенным примером скрипта.
Пример работы в Simulink
-
Запустите MatLAb.
-
Запустите Simulink из панели инструментов MatLab.
-
В появившемся окне Simulink Library Browser: File→New→ Model появится окно новой панели untitled.
-
Перейдите к окну Simulink Library Browser ( активизируйте S.L.B. ).
-
Из компонентов Simulink, отображаемых в левом поле, выберите библиотеку ``Sources``.
-
Из компонентов Sources, отображаемых в правом поле, перетащите (удержанием левой клавиши мыши) обьект ``Step`` в окно новой модели.
-
Повторите операцию для объекта ``Scope ``, находящегося в библиотеке ``Sinks``.
-
Далее рассмотрим моделирование системы, структурная схема которой приведена
на рис. 5.13.

Рис. 5.12. Структурная схема исследуемой системы
а) проделаем 3 раза операцию вставки объекта Transfer Fcn (динамического звена) из библиотеки Continuous;
б) вставим объекты Sum из библиотеки Math, Scope из библиотеки Sinks и Step из библиотеки Sources;
в) переходим в окно модели и расположим объекты в следующем порядке:
-
источник ступенчатого сигнала Step;
-
суммирующий узел Sum;
-
последовательно 3 динамических звена;
-
объект для графического представления выходного сигнала Scope;
г) проведём связи, задав нужный знак в суммирующем узле путём двойного нажатия левой кнопки мыши на объект узла;
д) установим коэффициенты звеньев следующим образом: сместив курсор на звено, дважды нажмите левую клавишу мыши и занесите коэффициенты полиномов через пробел числителя и знаменателя передаточной функции; в модуле Step установите величину Время шага равным 0.
-
Симуляция начинается после нажатия кнопки Start Simulation на панели инструментов.
-
Результат моделирования можно посмотреть, дважды нажав левую клавишу мыши на объекте Scope. Для наглядности следует на окне Scope нажать правую клавишу мыши и выбрать режим Auto Scale.
Для данного примера результат моделирования приведен на рис. 5.14.
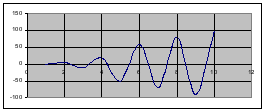
Рис.5.13. Переходная характеристика системы
Работа с графиком:
для изменения интервала видимости необходимо:
-
активизировать рабочее окно untitled;
-
выбрать Simulation →Simulation Parameters;
-
в окне Simulation Parameters выберите закладку Solver;
-
в окнах Start time и Stop time укажите время начала и конца симуляции, эти параметры будут являться границами интервала видимости в графическом окне Scope.
Библиографический список
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления.-СПб,
Изд-во “Профессия”, 2003.
2. Дорф Р., Бишоп Р. Современные системы управления.-М.: Лаборатория Базовых
Знаний, 2002.
3. Дьяконов В.П. MATLAB 6/6.1/6.5+Simulink 4/5 в математике и моделировании.-
М.: СОЛОН-Пресс, 2003.
4. Медведев В.С., Потёмкин В.Г. Control System Toolbox/ MATLAB 5 для студентов.-
М.: Изд-во Диалог-МИФИ, 1999.
5. Сборник задач по теории автоматического регулирования и управления.
Под ред. В.А. Бесекерского.-М.: Наука, 1978.
6. Филлипс Ч., Харбор Р. Системы управления с обратной связью.- М.: Лаборатория
Базовых Знаний, 2001.
7. Черных И.В. Simulink: среда создания инженерных приложений.
Под общ. ред. В.Г.Потёмкина. – М: ДИАЛОГ – МИФИ, 2003.