Файл: Контрольные работы. Теория автоматического управления.docx
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Методичка
Дисциплина: Теория автоматического управления
Добавлен: 19.10.2018
Просмотров: 5334
Скачиваний: 88
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Пермский национальный исследовательский политехнический университет»
Кафедра «Микропроцессорные средства автоматизации»
В.Г. Коломыцев
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Контрольные работы
Издательство Пермского национального исследовательского политехнического университета
2013
УДК 62.52
Рецензенты:
Коломыцев В.Г.
Теория автоматического управления. Контрольные работы: учеб. пособие / В.Г.Коломыцев.- Пермь : Изд-во Перм. нац. исслед. политехн. ун-та, 2013.- с.
Приведены сорок вариантов контрольных работ по базовым разделам теории автоматического управления. В приложении излагается в доступной форме теоретический материал по всем пяти задачам контрольных заданий, сопровождаемый примерами выполнения.
Пособие содержит методические указания по работе в программной системе Matlab.
Предназначено для выполнения контрольных работ по соответствующим темам дисциплины «Теория автоматического управления» студентами -заочниками инженерно-технических специальностей.
УДК 62.52
© ПНИПУ, 2013
ОГЛАВЛЕНИЕ
Список аббревиатур и буквенных обозначений ……… ………………………. 4
-
Введение ………………………………………………………………………….. 5
-
Контрольные задания: варианты №№1-40 ……………………………….......... 6 – 43
-
Исходная структурная схема системы регулирования частоты вращения
ротора двигателя (рис. 1) ………………………………………………………… 6
-
Структурная схема САУ (расчёт параметров ПИД – регулятора по
временному модифицированному методу Зиглера – Никольса, рис. 2) ………. 7
-
Исходные данные для расчета устойчивости систем (табл. 1) ………………… 7
-
Исходные данные для расчета параметров ПИД – регулятора
по временному методу Зиглера – Никольса (табл. 2) ………………….............. 8
-
Варианты заданий к программированию управляющих алгоритмов
цифровых контроллеров (табл.3) ……………………………………………… 9
-
Исходные данные для расчета параметров ПИД – регулятора
по частотному методу Зиглера – Никольса (табл. 4) ………………………… 11
-
Структурная схема САУ (расчёт параметров ПИД – регулятора по
методу CHR, рис. 3) ……………………………………………………….............12
-
Исходные данные для расчета параметров ПИД – регулятора
по методу CHR (табл. 5) ………………………………………………….............13
-
Структурная схема системы (расчёт параметров регулятора по
критерию модульного (технического) оптимума, рис. 4) ………………………14
-
Исходные данные для расчета параметров регулятора
по критерию модульного (технического) оптимума (табл.6) ………….............14
-
Структурная схема системы (расчёт параметров регулятора
системы с апериодической реакцией, рис. 5) …………………............................15
-
Исходные данные для расчета параметров регулятора
систем с апериодической реакцией (табл. 7) …………………………………….16
-
Способы определения передаточных функций замкнутых САУ
(приложение 1) …………………………………………………………….............44
-
Методика построения логарифмических частотных характеристик
САУ (приложение 2) …………………………………………………………… 48
-
Пример рекомендуемой последовательности действий при
анализе устойчивости системы (приложение 3) ……………………….............54
-
Методы настройки параметров ПИД – регулятора (приложение 4) ............. 55
-
Реализация цифровых регуляторов (приложение 5) ……………………………81
-
Греческий алфавит ………………………………………………………………..86
-
Список литературы ……………………………………………………………….87
-
Основы работы в MATLAB ……………………………………………………...88
-
Основы Simulink …………………………………………………………………..96
-
Режимы работы в MATLAB …………………………………………………….107
-
Библиографический список (описание работы в MATLAB) …………………109
СПИСОК АББРЕВИАТУР И БУКВЕННЫХ ОБОЗНАЧЕНИЙ
САУ – система автоматического управления
ЛЧX – логарифмические частотные характеристики
ПИД – пропорционально – интегрально – дифференциальный регулятор
CHR - Chien – Hrones – Reswick
ЛАЧХ – логарифмические амплитудно–частотные характеристики
ЛФЧХ – логарифмические фазо-частотные характеристики
MATLAB - интерактивная среда для научных и инженерных вычислений
Simulink - интерактивный инструмент, эффективно использующий графический интерфейс
П - пропорциональный регулятор
И - интегральный регулятор
ПИ - пропорционально – интегральный регулятор
ПД - пропорционально-дифференциальный регулятор
МО - модульный оптимум
СО - симметричный оптимум
 -
передаточная функция замкнутой системы
по каналу управления
-
передаточная функция замкнутой системы
по каналу управления
 -
передаточная
функция замкнутой системы по каналу
возмущения
-
передаточная
функция замкнутой системы по каналу
возмущения
 -
дискретная передаточная
функция регулятора
-
дискретная передаточная
функция регулятора
 -
передаточная функция регулятора
-
передаточная функция регулятора
 -
период квантования сигналов, с
-
период квантования сигналов, с
 -
постоянная времени объекта, с
-
постоянная времени объекта, с
 -
время изодрома, с
-
время изодрома, с
 -
время предварения, с
-
время предварения, с
ВВЕДЕНИЕ
Теория автоматического управления преподается с целью формирования у студентов научной базы и системного подхода для изучения и исследования сложных объектов, позволяющих им успешно изучать основы автоматизации технологических процессов.
Задачами изучения дисциплины являются приобретение студентами знаний роли и места автоматических систем в задаче автоматизации технических объектов и производств, основных принципов и схем автоматического управления, основных типов систем автоматического управления и их математическое описание, основ теории линейных, нелинейных и цифровых систем и умение разрабатывать структурные схемы и динамические модели исследуемых САУ, владеть методами исследования линеаризованных САУ на устойчивость и способами их стабилизации, уметь повышать качество САУ, овладеть способностью осваивать самостоятельно и применять в своей работе новые достижения в теории и практике управления техническими системами.
В контрольных заданиях отражены семь тем курса «Теории автоматического управления»: основы теории управления и математическое описание динамических звеньев и систем, устойчивость САУ, анализ качества САУ в статике и динамике, типовые регуляторы, системы управления с микроЭВМ.
Учебный материал содержится в учебных пособиях библиографического списка.
При выполнении и оформлении контрольных заданий необходимо соблюдать следующие указания:
-
Контрольную работу следует выполнять на листах формата А4: текстовую часть – пастой любого цвета, кроме красного, оставляя поля шириной 40-50 мм для замечаний рецензента, либо печатным способом, графическую часть – ручным, печатным, копировальным или фото-способами.
-
На титульном листе должны быть написаны фамилия и инициалы студента, учебный шифр и дата отсылки работы в университет.
-
Текстовый материал следует излагать подробно и аккуратно. Одинаковые тексты у разных студентов не зачитываются.
После получения из университета прорецензированной работы студент
обязан исправить все отмеченные в работе недостатки; в случае незачета – в кратчайший срок выполнить все требования преподавателя и предоставить работу на повторную проверку, приложив при этом первоначальную работу.
КОНТРОЛЬНЫЕ ЗАДАНИЯ
Вариант №1
-
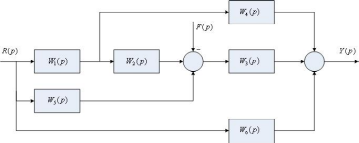
Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
-
Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
-
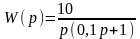
Проведите анализ устойчивости по критерию Гурвица системы, состоящей из функционально необходимых элементов, структурная схема которой приведена на рис. 1, а исходные данные для 1-го варианта – в табл. 1.
Рис. 1. Исходная структурная схема системы регулирования частоты вращения
ротора двигателя (kp – передаточный коэффициент ; Tp – постоянная
времени, с; ko – передаточный коэффициент двигателя (объекта) по
каналу управления; To1 и To2 - постоянные времени двигателя, с;
koc – передаточный коэффициент обратной связи
4. Настройте параметры ПИД – регулятора по временному
модифицированному методу Зиглера – Никольса системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 2, исходные данные для первого варианта –
в табл. 2.
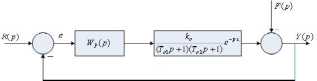
Рис. 2. Структурная схема САУ
5. Реализация цифровых регуляторов методом прямого
программирования по варианту 1 таблицы 3.
|
Исходные данные для расчета устойчивости систем |
Таблица 1 |
||||||||||||||||
|
№№ вариантов |
Параметры динамических звеньев |
Примечание |
|
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
1 |
430 |
410-3 |
3 |
210-2 |
810-3 |
0,02 |
|
|
|
||||||||
|
2 |
220 |
4,210-3 |
3,2 |
2,110-2 |
8,410-3 |
0,022 |
|
|
|
||||||||
|
3 |
140 |
3,810-3 |
3,3 |
1,910-2 |
8,710-3 |
0,028 |
|
|
|
||||||||
|
4 |
450 |
4,110-3 |
3,1 |
2,210-2 |
8,810-3 |
0,019 |
|
|
|
||||||||
|
5 |
240 |
3,710-3 |
2,9 |
2,610-2 |
6,810-3 |
0,021 |
|
|
|
||||||||
|
6 |
410 |
4,310-3 |
3,5 |
1,810-2 |
7,210-3 |
0,024 |
|
|
|
||||||||
|
7 |
380 |
4,410-3 |
2,8 |
2,710-2 |
7,610-3 |
0,022 |
|
|
|
||||||||
|
8 |
400 |
2,810-3 |
3,6 |
210-2 |
6,910-3 |
0,023 |
|
|
|
||||||||
|
9 |
290 |
310-3 |
3,4 |
2,210-2 |
7,710-3 |
0,018 |
|
|
|
||||||||
|
10 |
310 |
3,910-3 |
3,3 |
1,910-2 |
7,910-3 |
0,019 |
|
|
|
||||||||
|
11 |
440 |
4,510-3 |
3,7 |
1,710-2 |
710-3 |
0,024 |
|
|
|
||||||||
|
12 |
390 |
3,610-3 |
2,9 |
1,610-2 |
510-3 |
0,025 |
|
|
|
||||||||
|
13 |
260 |
3,110-3 |
2,8 |
2,310-2 |
910-3 |
0,02 |
|
|
|
||||||||
|
14 |
210 |
3,210-3 |
3 |
2,610-2 |
9,410-3 |
0,018 |
|
|
|
||||||||
|
15 |
300 |
410-3 |
2,9 |
2,310-2 |
610-3 |
0,023 |
|
|
|
||||||||
|
16 |
460 |
3,810-3 |
3,3 |
1,910-2 |
8,310-3 |
0,026 |
|
|
|
||||||||
|
17 |
320 |
4,210-3 |
3,4 |
2,410-2 |
8,110-3 |
0,024 |
|
|
|
||||||||
|
18 |
270 |
3,710-3 |
3,1 |
210-2 |
910-3 |
0,021 |
|
|
|
||||||||
|
19 |
340 |
3,510-3 |
2,8 |
1,910-2 |
7,910-3 |
0,022 |
|
|
|
||||||||
|
20 |
410 |
4,110-3 |
2,6 |
2,510-2 |
8,610-3 |
0,027 |
|
|
|
||||||||
|
21 |
310 |
6,110-3 |
1,5 |
2,710-2 |
6,410-3 |
0,03 |
|
|
|
||||||||
|
22 |
250 |
4,310-3 |
3,2 |
2,810-2 |
6,610-3 |
0,024 |
|
|
|
||||||||
|
23 |
400 |
2,610-3 |
3,3 |
2,410-2 |
5,210-3 |
0,019 |
|
|
|
||||||||
|
24 |
250 |
1,510-3 |
2,4 |
4,310-2 |
3,210-3 |
0,02 |
|
|
|
||||||||
|
25 |
350 |
5,410-3 |
5 |
2,210-2 |
6,310-3 |
0,025 |
|
|
|
||||||||
|
26 |
420 |
2,310-3 |
1,8 |
2,910-2 |
3,710-3 |
0,012 |
|
|
|
||||||||
|
27 |
120 |
1,210-3 |
4,1 |
4,110-2 |
1,910-3 |
0,021 |
|
|
|
||||||||
|
28 |
240 |
3,210-3 |
3,5 |
1,410-2 |
5,310-3 |
0,032 |
|
|
|
||||||||
|
29 |
340 |
6,510-3 |
3,7 |
2,610-2 |
2,410-3 |
0,014 |
|
|
|
||||||||
|
30 |
170 |
4,710-3 |
4.3 |
1,410-2 |
4,110-3 |
0,022 |
|
|
|
||||||||
|
31 |
330 |
2,810-3 |
1,5 |
3,710-2 |
6,710-3 |
0,015 |
|
|
|
||||||||
|
32 |
290 |
5,310-3 |
2,6 |
1,810-2 |
5,310-3 |
0,016 |
|
|
|
||||||||
|
33 |
110 |
3,710-3 |
4,8 |
2,510-2 |
6,510-3 |
0,017 |
|
|
|
||||||||
|
34 |
390 |
1,710-3 |
5,4 |
4,510-2 |
2,310-3 |
0,023 |
|
|
|
||||||||
|
35 |
420 |
2,910-3 |
2,4 |
2,810-2 |
4,810-3 |
0,011 |
|
|
|
||||||||
|
36 |
240 |
2,110-3 |
3,8 |
2,110-2 |
3,810-3 |
0,019 |
|
|
|
||||||||
|
37 |
160 |
4,910-3 |
5,1 |
3,910-2 |
6,410-3 |
0,023 |
|
|
|
||||||||
|
38 |
250 |
1,110-3 |
4,7 |
3,310-2 |
5,910-3 |
0,013 |
|
|
|
||||||||
|
39 |
270 |
1,810-3 |
3,9 |
4,110-2 |
5,410-3 |
0,024 |
|
|
|
||||||||
|
40 |
270 |
4,410-3 |
2,1 |
4,710-2 |
2,510-3 |
0,028 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||





