Файл: Контрольные работы. Теория автоматического управления.docx
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Методичка
Дисциплина: Теория автоматического управления
Добавлен: 19.10.2018
Просмотров: 5335
Скачиваний: 88
Таблица 2
|
Исходные данные для расчета параметров ПИД – регулятора по временному методу Зиглера - Никольса |
|
|||||||
|
№№ вариантов |
Параметры динамических звеньев |
|
|
|||||
|
|
|
|
|
|
|
|||
|
1 |
1 |
0,1 |
0,12 |
0,01 |
|
|
||
|
2 |
1,2 |
0,11 |
0,14 |
0,011 |
|
|
||
|
3 |
1,5 |
0,09 |
0,13 |
0,012 |
|
|
||
|
4 |
1,8 |
0,12 |
0,08 |
0,013 |
|
|
||
|
5 |
2 |
0,07 |
0,15 |
0,014 |
|
|
||
|
6 |
4 |
0,06 |
0,12 |
0,02 |
|
|
||
|
7 |
5 |
0,09 |
0,16 |
0,01 |
|
|
||
|
8 |
6 |
0,02 |
0,08 |
0,012 |
|
|
||




Таблица 3
Варианты заданий к программированию управляющих алгоритмов цифровых контроллеров
|
Номера вариантов |
Дискретные передаточные функции регуляторов |
kp |
kd |
ki |
T,c |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
|
1,45 1,5 1,4 2 3,2 2,2 1,3 3 1 1,6 1,55 2,1 2,3 3,8 1,65 1,47 1,49 1,2 1,3 1,8 |
0,43 0,48 0,42 1,5 0,4 1,2 0,38 2,2 0,44 1,1 0,52 0,45 1.43 0,39 0,47 0,54 0,62 2,3 1,7 2,4 |
1 1,3 1,2 0,8 0,5 1,5 0,9 1,1 1,4 0,7 0,6 0,85 0,95 0,93 0,77 1,06 1,12 0,8 1,4 0,82 |
0,1 0,12 0,11 0,09 0,05 0,04 0,08 0,07 0,02 0,14 0,095 0,03 0,06 0,065 0,13 0,097 0,032 0,14 0,04 0,07 |
|
21 |
|
|
|
|
|
|
22 |
|
|
|
|
|
|
23 |
|
|
|
|
|
|
24 |
|
|
|
|
|
|
25 |
|
|
|
|
|
|
26 |
|
|
|
|
|
|
27 |
|
|
|
|
|
|
28 |
|
|
|
|
|
|
29 |
|
|
|
|
|
|
30 |
|
|
|
|
|
|
31 |
|
|
|
|
|
|
32 |
|
|
|
|
|
|
33 |
|
|
|
|
|
|
34 |
|
|
|
|
|
|
35 |
|
|
|
|
|
|
36 |
|
|
|
|
|
|
37 |
|
|
|
|
|
|
38 |
|
|
|
|
|
|
39 |
|
|
|
|
|
|
40 |
|
|
|
|
|






















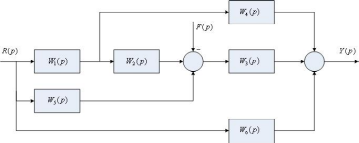
Вариант №2
-
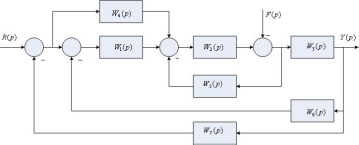
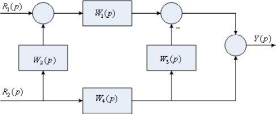
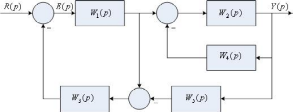
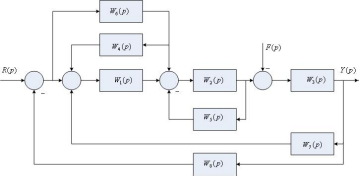
Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
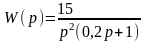
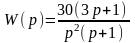
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
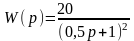 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 2-го варианта
– в табл.1.
4. Настройте параметры ПИД – регулятора по частотному методу
Зиглера – Никольса системы, состоящей из функционально необходимых
элементов. Структурная схема системы приведена на рис. 2, исходные
данные для первого варианта – в табл. 4.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 2 таблицы 3.
Таблица 4
|
Исходные данные для расчета параметров ПИД – регулятора по частотному методу Зиглера - Никольса |
|
|||||||
|
№№ вариантов |
Параметры динамических звеньев |
|
|
|||||
|
|
|
|
|
|
|
|||
|
1 |
4 |
2 |
8 |
0,3 |
|
|
||
|
2 |
5 |
1 |
9 |
0,2 |
|
|
||
|
3 |
6 |
3 |
8 |
0,1 |
|
|
||
|
4 |
3 |
1 |
7 |
0,25 |
|
|
||
|
5 |
2 |
4 |
6 |
0,14 |
|
|
||
|
6 |
1 |
1 |
11 |
0,15 |
|
|
||
|
7 |
4 |
2 |
12 |
0,18 |
|
|
||
|
8 |
2 |
0,8 |
7 |
0,3 |
|
|
||




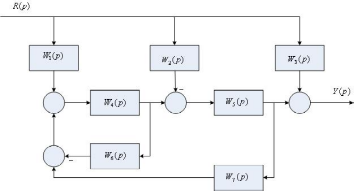
Вариант №3
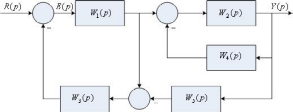
1. Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
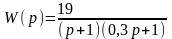
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
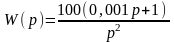 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 3-го
варианта – в табл.1.
-
Настройте параметры ПИД – регулятора по методу CHR системы,
состоящей из функционально необходимых элементов. Структурная схема системы приведена на рис. 3, исходные данные для первого варианта – в табл. 5.
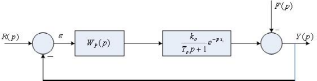
Рис. 3. Структурная схема САУ
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 3 таблицы 3.
Таблица 5
|
Исходные данные для расчета параметров ПИД – регулятора по методу CHR |
|
|||||||
|
№№ вариантов |
Параметры динамических звеньев |
|
|
|||||
|
|
|
|
|
|
|
|||
|
1 |
1 |
3 |
0,4 |
|
|
|
||
|
2 |
2 |
2 |
0,2 |
|
|
|
||
|
3 |
3 |
4 |
0,3 |
|
|
|
||
|
4 |
4 |
2,3 |
0,25 |
|
|
|
||
|
5 |
1 |
2,5 |
0,35 |
|
|
|
||
|
6 |
2 |
3 |
0,1 |
|
|
|
||
|
7 |
3 |
3,5 |
0,38 |
|
|
|
||
|
8 |
4 |
2,8 |
0,15 |
|
|
|
||

Вариант №4
1. Определите передаточную функцию по каналу управления
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная схема
которой приведена на рис. 1, а исходные данные для 4-го варианта – в
табл. 1.
4. Настройте параметры регулятора по критерию модульного
(технического) оптимума системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 4, исходные данные для первого варианта –
в табл. 6.
Рис. 4. Структурная схема системы
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 4 таблицы 3.
Таблица 6
|
Исходные данные для расчета параметров регулятора по критерию модульного (технического) оптимума |
|
|||||||
|
№№ вариантов |
Параметры динамических звеньев |
|
|
|||||
|
|
|
|
|
|
|
|||
|
1 |
0,9 |
2,5 |
5 |
|
|
|
||
|
2 |
0,8 |
3,2 |
4 |
|
|
|
||
|
3 |
0,7 |
3 |
6 |
|
|
|
||
|
4 |
1,1 |
1,5 |
3 |
|
|
|
||
|
5 |
1,2 |
3,2 |
7 |
|
|
|
||
|
6 |
0,6 |
2 |
4,5 |
|
|
|
||
|
7 |
1,2 |
2,3 |
5,5 |
|
|
|
||
|
8 |
1,3 |
2,4 |
6,2 |
|
|
|
||



Вариант №5
1. Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная схема
которой приведена на рис. 1, а исходные данные для 5-го варианта – в
табл. 1.
4. Настройте параметры регулятора системы с апериодической реакцией,
состоящей из функционально необходимых элементов. Структурная схема
системы приведена на рис. 5, исходные данные для первого варианта –
в табл. 7.
Рис. 5. Структурная схема САУ
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 5 таблицы 3.
Таблица 7
|
Исходные данные для расчета параметров регулятора систем с апериодической реакцией |
|
|||||||
|
№№ вариантов |
Параметры динамических звеньев |
|
|
|||||
|
|
|
|
|
|
|
|||
|
1 |
5 |
0,9 |
|
|
|
|
||
|
2 |
4 |
0,7 |
|
|
|
|
||
|
3 |
6 |
0,8 |
|
|
|
|
||
|
4 |
2 |
1,2 |
|
|
|
|
||
|
5 |
4 |
1,1 |
|
|
|
|
||
|
6 |
3 |
1,3 |
|
|
|
|
||
|
7 |
2,5 |
1,4 |
|
|
|
|
||
|
8 |
5,5 |
0.6 |
|
|
|
|
||


Вариант №6
1. Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 6-го
варианта – в табл. 1.
4. Настройте параметры ПИД – регулятора по временному
модифицированному методу Зиглера – Никольса системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 2, исходные данные для второго варианта –
в табл. 2.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 6 таблицы 3.
Вариант №7
1. Определите передаточную функцию по рассогласованию
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 7-го
варианта – в табл. 1.
4. Настройте параметры ПИД – регулятора по частотному
методу Зиглера – Никольса системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 2, исходные данные для второго варианта –
в табл. 4.
5. Реализация цифровых регуляторов методом прямого
программирования по варианту 7 таблицы 3.
Вариант №8
1. Определите передаточную функцию по каналам управления
 и
и
 следующей алгоритмической структуры
САУ:
следующей алгоритмической структуры
САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
Состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 8-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по методу CHR системы,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 3, исходные данные для второго
варианта – в табл. 5.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 8 таблицы 3.
Вариант №9
1. Определите передаточную функцию по каналу управления
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная схема
которой приведена на рис. 1, а исходные данные для 9-го варианта – в
табл. 1.
4. Настройте параметры регулятора по критерию модульного
(технического) оптимума системы, состоящей из функционально
необходимых элементов. Структурная схема системы приведена на
рис. 4, исходные данные для второго варианта – в табл. 6.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 9 таблицы 3.
Вариант №10
1. Определите передаточную функцию по рассогласованию
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 10-го варианта
– в табл. 1.
4. Настройте параметры регулятора системы с апериодической реакцией,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 5, исходные данные для второго
варианта – в табл. 7.
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 10 таблицы 3.
Вариант №11
1. Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 11-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по временному
модифицированному методу Зиглера – Никольса системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 2, исходные данные для третьего варианта –
в табл. 2.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 11 таблицы 3.
Вариант №12
1. Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
Состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 12-го
варианта – в табл. 1.
4. Настройте параметры ПИД – регулятора по частотному методу Зиглера
– Никольса системы, состоящей из функционально необходимых
элементов. Структурная схема системы приведена на рис. 2, исходные
данные для третьего варианта – в табл. 4.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 12 таблицы 3.
Вариант №13
1. Определите передаточную функцию по каналу управления
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная