Файл: Петров В.В. Автоматизированные системы управления дорожным движением в городах.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.01.2020
Просмотров: 5182
Скачиваний: 76
СОДЕРЖАНИЕ
Список сокращений и обозначений, встречающихся в тексте
1.1. Транспортный поток как объект управления
1.1.1. Свойства транспортного потока
1.1.2. Состояния транспортного потока
1.1.3. Распределение временных интервалов
1.2. Основные принципы управления
1.3. Основные функции и состав системы
1.4. Расчёт режимов управления
2.1. Классификация технических средств
2.1.1. Периферийные технические средства
2.1.2. Устройства центрального управляющего пункта (ЦУП)
2.1.3. Контрольно-проверочная аппаратура
2.2. Основные принципы построения систем
2.3.2. Дорожный контроллер ДКС-Д
2.4.2. Принципы установки детекторов транспорта
2.4.3. Правила размещения чувствительных элементов
2.4.4. Режимы работы детектора транспорта
2.4.5. Детектор транспорта ДТ-ИК
2.5.1. Комплекс технических средств ЦУПа
2.5.2. Контроллер районного центра (КРЦ)
2.5.3. Дисплейный пульт оперативного управления
2.5.4. Табло коллективного пользования
2.5.5. АРМ технолога по обработке статистики транспортных потоков
2.6. Принципы обмена информацией
2.7. Контрольно-диагностическая аппаратура
3.1. Технологические алгоритмы системы
3.1.1. Классификация технологических алгоритмов
3.1.6. Алгоритм функционирования системы
3.2. Программное обеспечение АСУД
3.3. Комплекс сервисных программ АСУД
3.3.1. Программа «АРМ технолога»
3.3.2. Программа «Формирование рабочего проекта АСУД-Д»
3.3.3. Программа «Формирование привязки для контроллера типа ДКС»
3.3.4. Программа «Формирование таблицы соединений»
4.1. Основные этапы создания АСУД
4.5. Примеры АСУД в некоторых городах
5.1. Факторы, влияющие на эффективность системы
5.2. Определение эффективности системы
Заторовые детекторы. Заторовые детекторы устанавливаются перед перекрестками, на которых возможно возникновение очереди ТС, которая не разгружается за цикл и распространяется до соседнего перекрестка, перекрывая на нем движение в поперечном направлении. Необходимость установки детекторов определяется на основании анализа вероятности возникновения затора.
ЧЭ следует устанавливать на левую полосу, во избежание непредвиденных ситуаций. Расстояние L от стоп-линии до места размещения ЧЭ следует рассчитывать по формуле
![]() , (2.2)
, (2.2)
где g – длительность зеленого сигнала на перекрестке, с; l – средний динамический габарит ТС, м; t – среднее время разгрузки для одной полосы движения, принимается равным 2,5 с.
2.4.3. Правила размещения чувствительных элементов
Размещение по типу чувствительных элементов. Наиболее широкое распространение на практике получили пассивные инфракрасные чувствительные элементы (ИК ЧЭ).
Установка ИК ЧЭ не требует вскрытия дорожного полотна, они устанавливаются фиксированно над поверхностью дороги.
Размещение по полосам. При размещении ЧЭ необходимо учитывать следующие правила:
-
ЧЭ для измерения интенсивности располагаются только на одной полосе;
-
если направление движения имеет две полосы, то ЧЭ следует располагать на левой полосе;
-
если направление движения имеет три полосы, то ЧЭ следует располагать на средней полосе;
-
ЧЭ можно располагать на нескольких полосах с учетом направлений, более чем по одному в фазе, если в этом есть необходимость;
-
в каждой фазе следует устанавливать только один ЧЭ на направлении, где в течение суток наблюдается наибольшая интенсивность;
-
если наибольшая интенсивность в различные периоды суток наблюдается на различных направлениях, то следует ставить ЧЭ на каждом из этих направлений.
Расстояния от места укладки ЧЭ до стоп-линии для различных ситуаций приведены в табл. 2.2.
Таблица 2.2
|
tmin, c |
Интенсивность, авт./ч на полосу |
||
|
до 120 |
120 - 300 |
более 300 |
|
|
До 8 |
20 |
30 |
40 |
|
8 - 15 |
30 |
40 |
50 |
|
Более 15 |
40 |
50 |
60 |
2.4.4. Режимы работы детектора транспорта
Детекторы транспорта в системах, реализующих алгоритм поиска разрывов. Для реализации алгоритма поиска разрывов с постоянными уставками управления используются проходные детекторы, размещаемые на каждом входном направлении.
Выбор величины временного разрыва Тэк обусловлен некоторыми особенностями. Ее значение ограничивается снизу максимально возможным интервалом ТС в потоке насыщения. Примечательно, что слишком малый временной разрыв может привести к преждевременному выключению зеленого сигнала. Нижний предел обычно принимается равным 3 с. На выбор верхнего предела влияют несколько факторов:
-
слишком большое значение заставляет устанавливать ЧЭ далеко от стоп-линии, поэтому рекомендуется выбрать интервал из табл. 2.3;
-
при большой скорости подхода к перекрестку применение алгоритма поиска разрывов с постоянными уставками неэффективно (алгоритм эффективен при скорости до 48 км/ч).
Таблица 2.3
|
% лег. ТС |
0-20 |
20-40 |
40-60 |
60-80 |
80-100 |
|
Тэк, с |
6 |
5,5 |
5 |
4,5 |
4 |
Детекторы транспорта в системах, реализующих алгоритм управления движением по запросу. Алгоритм предусматривает включение зеленой фазы при наличии запроса и применяется для пропуска отдельных ТС через загруженную магистраль. В детекторах вызывного действия ЧЭ устанавливается только на второстепенных дорогах. При интенсивном движении по главной магистрали остановка ТС на второстепенном направлении во внимание не принимается.
При выборе расстояния от ЧЭ до стоп-линии перекрестка необходимо учитывать следующее: при tmin=8 c расстояние от ЧЭ до стоп-линии – не менее 20 м. Причем с увеличением tmin соответственно увеличивается и расстояние от стоп-линии до ЧЭ, так как водители, подъезжающие по второстепенному направлению на зеленый сигнал, не останавливаются, если желтый сигнал застал их перед стоп-линией.
2.4.5. Детектор транспорта ДТ-ИК
Назначение. Детектор транспорта ДТ-ИК предназначен для работы в качестве детектора прохождения транспортных средств по дорожно-транспортной сети в составе автоматизированных систем управления дорожным движением.
Технические данные. Принцип обнаружения транспортных единиц (ТЕ) – пассивное инфракрасное детектирование.
Тип работы – детектор прохождения.
Дальность обнаружения ТЕ – 12 м.
Максимальный размер контролируемой зоны (КЗ) – 2 м 2 м по одной полосе в одном направлении движения.
Диапазон рабочих температур – от - 40 до + 50 С.
Питание – напряжение переменного тока 220 В.
Потребляемый ток – 30 мА (max).
Протокол передачи информации – АСС-УД.
Устройство и работа ДТ-ИК. На рис. 2.6 приведена структурная схема детектора ДТ-ИК.
На плате ПИК-1 в качестве чувствительного элемента в инфракрасном датчике ИКД применён пассивный пироэлектрический элемент, который обеспечивает необходимое измерение выходного сигнала при изменении температуры в контролируемой зоне на 5 С. Спектр принимаемого ИК излучения исключает влияние на работу датчика чада от выхлопных газов, тумана и водяных паров и обеспечивает независимость от атмосферных условий. Интенсивность контролируемого излучения зависит от температуры объекта, его размеров и структуры поверхности, но не от её цвета или условий освещённости. Поэтому датчик работает круглосуточно.
Плата УП-1 содержит процессор, задачей которого является определение наличия ТЕ в контролируемой зоне на основании анализа сигналов, поступивших с ИКД. Светодиод HL2 индицирует поступление стартовых импульсов на устройство. Светодиод HL1 индицирует сигнал прохождения ТЕ, формируемый процессором.
ИПТ-3 – источник питания, обеспечивающий работу ПИК-1 и УП-3.

Рис. 2.6. Структурная схема детектора ДТ-ИК
Установка детектора. На объекте устройство ДТ-ИК может монтироваться на светофорной колонке, мостах, эстакадах, столбах освещения. Следует обратить внимание на стабильность монтажа. Вибрации носителя (мачты, кронштейна и т. д.), обусловленные погодными условиями, должны быть исключены.
На рис. 2.7 приведен пример установки детектора на столбе освещения.
Устройство может поворачиваться на кронштейне крепления на угол, равный 35. Угол захвата оптической системы датчика составляет 8, и при указанных на рисунке размерах контролируемая зона (КЗ) будет иметь вид квадрата 1,7 1,7 м.
Детектор ДТ-ИК подключается к линии связи с помощью двух проводов через разъем ХТ1 платы УП-1. Назначение контактов разъема ХТ1 следующее: 1 – первый провод линии связи; 2 – второй провод линии связи.
Сетевое напряжение подводится к разъему ХP2 (контакты 3, 4) платы ИПТ-3.

Рис. 2.7. Пример установки детектора на столбе освещения
Схема подключения ДТ-ИК приведена на рис. 2.8.

Рис. 2.8. Схема подключения детектора ДТ-ИК
Настройка детектора на контролируемую полосу движения ТЕ. Установив детектор в зоне обследования и включив его, необходимо убедиться, что красный светодиод устройства реагирует на наличие ТЕ на контролируемой полосе.
Если красный светодиод не реагирует на наличие ТЕ на контролируемой полосе или реагирует на ТЕ, проезжающие по соседней полосе, необходимо повернуть детектор, для того чтобы добиться правильной реакции.
Для точной настройки ДТ-ИК на контролируемую полосу используется лазерный прицел.
При установке ДТ-ИК на расстоянии более 6 м от контролируемой полосы возможно ослабление сигнала (неустойчивый сигнал), в этом случае рекомендуется снять защитный экран с бленды устройства.
2.5. Структура ЦУПа
2.5.1. Комплекс технических средств ЦУПа
Центральный управляющий пункт является центром, куда поступает различная информация о функционировании комплекса технических средств, параметрах транспортных потоков со всего района управления АСУД.
ЦУП состоит из нескольких ПЭВМ, объединенных средствами локальной сети. Каждая ПЭВМ имеет свое конкретное назначение и выполняет прием и обработку информации, а также выдачу решений по возникающим проблемам.
Структура ЦУП относится к открытому типу, т.е. позволят компоновать и расширять систему устройствами для решения нескольких задач. На рис. 2.9 приведена структурная схема ЦУПа АСУД.

Рис. 2.9. Структурная схема ЦУП АСУД
Комплекс вычислительных средств ЦУПа включает следующие устройства:
-
СЕРВЕР – ПЭВМ, обслуживающая локальные сети №1 и 2 и модемную связь;
-
АРМ ТП – ПЭВМ для сбора и анализа статистических данных о транспортных потоках;
-
АРМ деж. – ПЭВМ для оперативного дежурного ЦУПа (получение справок, ввод данных, поступающих по телефону);
-
АРМ прог. – ПЭВМ программиста системы для изменения файлов привязки и перекомпоновки ПО;
-
ПЭВМ-У – управляющая ПЭВМ на базе КРЦ;
-
ТКП – табло коллективного пользования (диагональ 116 см) на базе ПЭВМ;
-
М – модем для выхода в ГТС;
-
ДПОУ – дисплейный пульт оперативного управления.
Необходимо учитывать, что приведенная структура ЦУПа позволяет проводить расширение района управления АСУД добавлением КРЦ. Такая мера позволяет без изменений и реконструкций увеличивать количество охватываемых перекрестков на 48 с каждым КРЦ.
2.5.2. Контроллер районного центра (КРЦ)
Назначение изделия. КРЦ предназначен для управления дорожными контроллерами, подключаемыми как непосредственно по радиальным каналам связи, так и через контроллеры КЗЦ ТУ 25-1724.002-86.
|
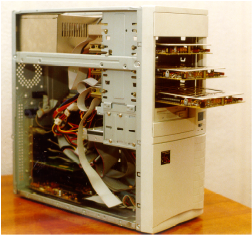
КРЦ используются в автоматизированных системах управления дорожным движением разных поколений, таких как АСС-УД, АСУД «Сигнал», АСУД-С, и рассчитаны на непрерывную круглосуточную работу в стационарных условиях в отапливаемом помещении при температуре окружающего воздуха от 5 до 40 C и относительной влажности от 5 до 95 %. |
Рис. 2.10. Внешний вид КРЦ |
Технические характеристики. Технические характеристики КРЦ различных модификаций приведены в табл. 2.4.
КРЦ модификаций КРЦ-01, КРЦ-02, КРЦ-06, КРЦ-07, КРЦ-08 обеспечивают обмен информацией ТУ-ТС с дорожными контроллерами (ДК).
Таблица 2.4
|
Технические данные |
Модификации |
||||||||
|
КРЦ |
КРЦ-01 |
КРЦ-02 |
КРЦ-03 |
КРЦ-04 |
КРЦ-05 |
КРЦ-06 |
КРЦ-07 |
КРЦ-08 |
|
|
Количество линий связи с ДК |
48 |
32 |
16 |
- |
- |
- |
32 |
16 |
16 |
|
Количество линий связи с КЗЦ |
- |
- |
- |
3 |
2 |
1 |
1 |
1 |
2 |
Параметры линий связи с ДК:
-
тип – выделенная пара в кабеле городской телефонной сети либо специально проложенный кабель;
-
сопротивление линии постоянному току – не более 2850 Ом;
-
емкость линии – не более 0,75 мкФ.
Количество ДК, подключаемых к каждой линии связи, – 2.
КРЦ обеспечивают гальваническую развязку с линиями связи.
Обмен с ДК осуществляется синхронно, в полудуплексном режиме, со скоростью 100 бит/с.
Инициатива обмена принадлежит КРЦ, длительность цикла обмена со всеми ДК – 1 с.
Количество передаваемых в каждую линию связи команд ТУ – 3 байта за цикл.
Количество принимаемых из каждой линии связи сигналов ТИ-ТС – 6 байтов за цикл.
Модификации КРЦ-03, КРЦ-04, КРЦ-05, КРЦ-06, КРЦ-07, КРЦ-08 обеспечивают обмен информацией ТУ-ТС с контроллерами КЗЦ.
Сопряжение с линией связи – по стыку С1-ФЛ ГОСТ 27232.
Принцип обмена информацией – синхронный, режим обмена – полудуплексный, инициатива обмена принадлежит КРЦ, длительность цикла обмена – 1с.
Способ передачи информации в линию связи – последовательный с применением биимпульсного кодирования.
Скорость передачи – 1200 бит/с.
Реализация алгоритмов работы КРЦ – программным путем с использованием ПЭВМ.
При работе КРЦ обеспечивается вывод на монитор различной информации и оперативное воздействие через клавиатуру.
Мощность, потребляемая КРЦ, – не более 50 Вт.
Габаритные размеры КРЦ – не более 190х472х435 мм.
Масса КРЦ – не более 13,5 кг.
Среднее время восстановления – не более 15 мин.
Средний срок службы КРЦ – не менее 10 лет при условии восстановления его составных и механических частей по истечении их ресурсов.
Состав изделия. КРЦ содержит следующие основные составные части:
-
системный блок стандартной ПЭВМ с программным обеспечением АСУД;
-
субблок ДПА – 1 шт.;
-
субблок СС – 1 шт.;
-
субблоки ЛУ16 и МБИ – согласно табл. 2.5;
-
жгуты связи.
Таблица 2.5
|
Субблок |
Модификации |
||||||||
|
КРЦ |
КРЦ-01 |
КРЦ-02 |
КРЦ-03 |
КРЦ-04 |
КРЦ-05 |
КРЦ-06 |
КРЦ-07 |
КРЦ-08 |
|
|
ЛУ16 |
3 |
2 |
1 |
- |
- |
- |
2 |
1 |
1 |
|
МБИ |
- |
- |
- |
3 |
2 |
1 |
1 |
1 |
2 |
Устройство и работа. Конструктивно КРЦ выполнен в корпусе MIDI TOWER системного блока ПЭВМ. В стандартный блок добавляется субблок ДПА, устанавливаемый на свободное место с подключением к шине ISA. В свободных отсеках, отведенных для дисководов, размещаются субблоки ЛУ16, МБИ и СС. Связь субблоков между собой осуществляется с помощью ленточных жгутов.
Системный блок персонального компьютера является покупным изделием и кроме стандартных функций выполняет также функции по обмену информацией с субблоком ДПА в соответствии со специальной программой, занесенной в компьютер.
Субблок ДПА предназначен для ежесекундного обмена информацией и ТУ-ТС с персональным компьютером, а также с субблоками ЛУ16 и субблоками МБИ.
Субблок ЛУ16 осуществляет ежесекундный обмен информацией ТУ-ТС с субблоком ДПА и с 32-мя дорожными контроллерами по 16-ти каналам связи.
Субблок МБИ предназначен для ежесекундного обмена информацией ТУ-ТС с субблоком ДПА и двумя контроллерами КЗЦ.
Субблок СС содержит источник питания, формирующий низковольтные напряжения для субблоков ЛУ16, а также обеспечивает защиту от перегрузок и перенапряжений.
На рис. 2.11 приведено построение модификации КРЦ, содержащей 3 субблока ЛУ16.

Рис. 2.11. Структурная схема КРЦ
Сетевое напряжение питания подается на вилку XP1 системного блока персонального компьютера А16, с которой оно поступает через жгут А17 «А1-А16» на вилку ХР1 субблока СС. Вырабатываемые СС низковольтные напряжения питания подаются через вилку ХР3 СС на розетку XS1 жгута А2 «ЛУ-ДПА». Розетки XS1-XS5 жгута «ЛУ-ДПА» соединяются между собой, обеспечивая связь между субблоками ЛУ16 и ДПА и подачу на них напряжений питания.
Подключение субблоков ЛУ16 к дорожным контроллерам производится через жгуты «ЛС-ЛУ16».
Подключение субблока ДПА к системному блоку осуществляется через розетку шины ISA.
2.5.3. Дисплейный пульт оперативного управления
Дисплейный пульт оперативного управления (ДПОУ) является основной составной частью ЦУПа.