ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 6698
Скачиваний: 11

26
Исполнение – вызов функции, которой является задача.
L1[1].exec.
}
Последовательность выполнения в пределах одной метки
определяется структурой таблицы.
После вызова каждой функции проверяется количество
элементов в списке, и в зависимости от количества элементов
происходит переход на следующую метку либо исполнение функций из
текущей метки.
Примечание 1: Планировщик во время запуска задач обязан
контролировать занятость ресурса текущей задачи, а также должен
осуществлять контроль временных характеристик задач, указанных в
таблице.
Примечание 2: Если временные характеристики нарушены,
должно сформироваться отказное состояние системы.

27
Классификация приложений
систем реального времени
Основной параметр – предсказуемость.
Две парадигмы приложений для предсказуемости систем:
1.
Архитектура приложения, работающего по событию. (ET –
Event Type).
2.
Архитектура приложения, функционирующего по времени.
(TT
– Time Type).
ET
– подход
Любая деятельность системы начинается в ответ на
возникающее специфическое событие. Вид события определяется
самой
системой.
Предсказуемость
достигается
следующими
способами:
1. Использование стратегии оценки для каждой прикладной
задачи (оценивается потребность данной задачи в текущий момент
времени). Проверяется несколькими способами:
а) Проверяется загруженность узла.
б) Проверяется время предыдущего запуска данной задачи и
анализируется эффект от невыполнения задачи. При отрицательном
эффекте задача обязательно должна быть запущена.
2. Оценка потребности ресурсов для данной задачи.
3. Оценка готовности ресурсов для удовлетворения потребностей
и задач.
Достоинства: управляемость со стороны системы, независимость
от времени (количества тактов).
Недостатки:
сложность
алгоритма
оценки,
отсутствие
возможности синхронизации событий на разных узлах.
28
ТТ – подход
Деятельность системы начинается в определенный заданный
момент глобально синхронизированного времени. Предсказуемость
достигается путём приведения всех задач к периодическим. Для
апериодических, спорадических и фоновых задач создаются мета-
задачи, которые занимаются обработкой соответствующего типа
задач.
Достоинства:
1.
На
всех
узлах
задачи
могут
исполняться
по
синхронизированному времени.
2.
Таблица задач является фиксированной, для неё можно
провести моделирование на возможность функционирования в режиме
РВ.
Недостатки: слабая управляемость процесса исполнения задач.
Не существует возможности управления последовательностью задач в
процессе функционирования системы.
Моделирование систем реального времени
Моделирование систем реального времени необходимо для
оценки разрабатываемой системы по временным характеристикам.
Основная временная характеристика – максимальное время
задержки исполнения.
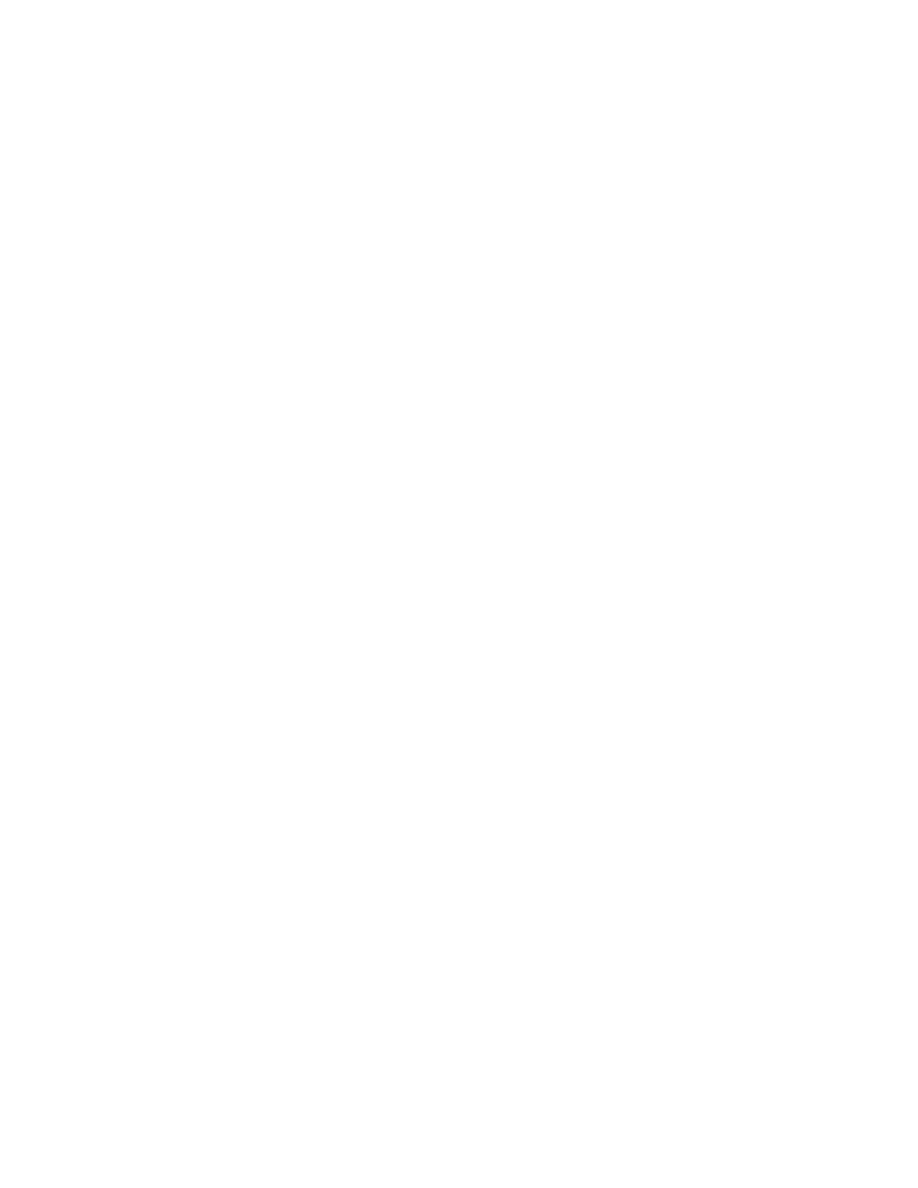
Рассмотрим пример: торможение машины
29
2
1
Педаль тормоза
Тормозные колодки
Контроллеры
Рис.14.
I
способ: обеспечение механической связи
II
способ: обеспечение электрической связи. На каждый объект
ставятся контроллеры, объединённые в сеть. Необходимо оценить
время, за которое человек, нажавший на педаль тормоза, получит
желаемый результат.
∑t = t
реакции человека
+ t
нажатия на педаль тормоза
+ t
обработки сигнала узлом 1
+
t
передачи информации
+ t
обработки сигнала узлом 2
+ t
выдачи управляющего воздействия
+
t
срабатывания
t
передачи информации
= t
1
+ t
2
+ t
3
+ t
4
+ t
5
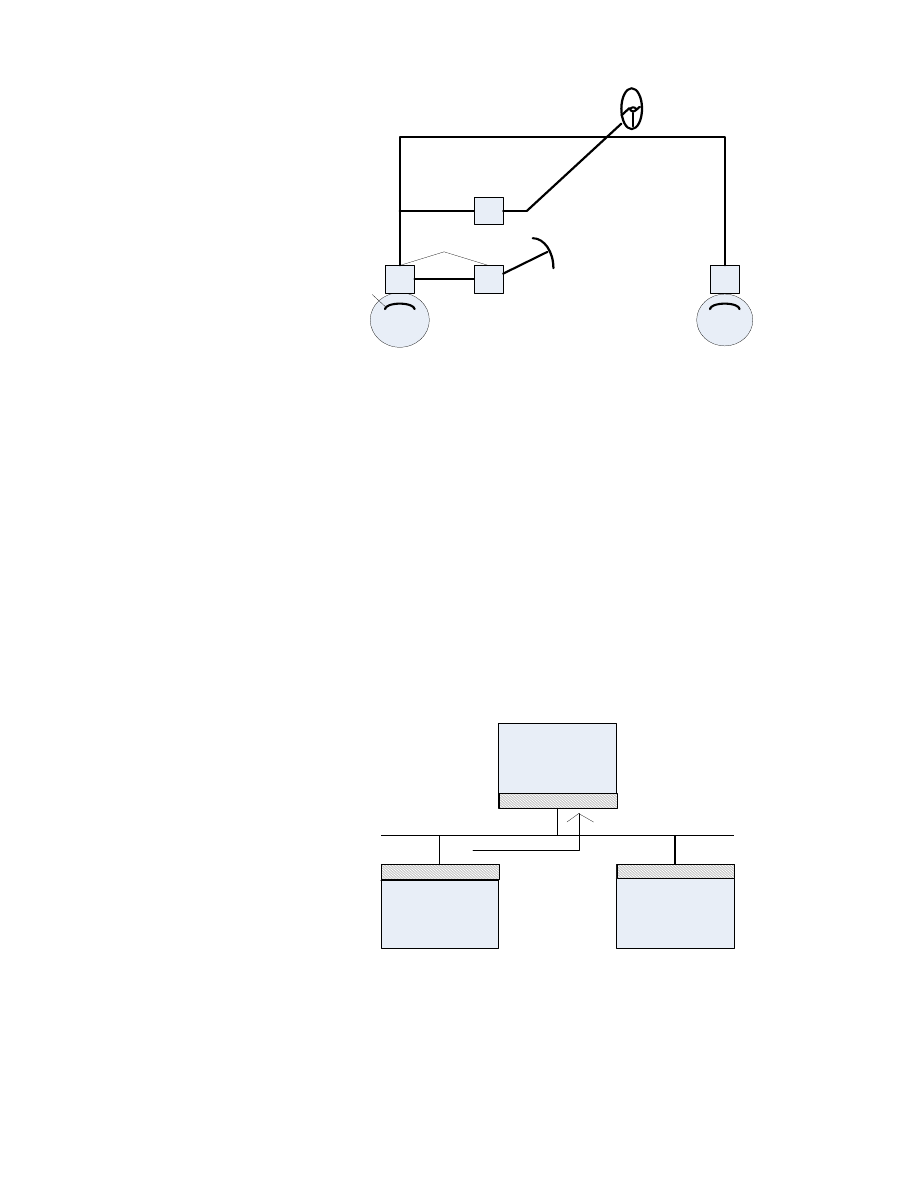
t2
↑
t1
↑
Сетев.контр.
Основ.контр.
t3
t4
↑
t5
Рис.15.
Сеть состоит из основного и сетевого контроллеров.
t
1
– передаёт информацию от сетевого контроллера к основному.
t
2
– передаёт информацию от основного контроллера к шине.

30
t
3
– возникает разброс передачи сообщений в сеть из-за
использования 1 канала.
t
4
– передача информации на сетевой узел.
t
5
– передача информации с сетевого контроллера узла 2 к
основному контроллеру.
Задача моделирования – определение максимального времени
передачи информации в распределенной системе управления от
одного узла к другому.
Основным правилом при моделировании системы является
гарантированное время передачи информации.
Гарантированное время передачи информации – это время, за
которое система выполняет действие вне зависимости от внешних
факторов.
При моделировании система делится на две модели:
1.
Модель функционирования типового узла.
2. Модель распределенной системы управления.
Модель одиночного (типового) узла является детерминированной
моделью (моделью с известным поведением). Следовательно, всегда
можно получить время выполнения операции на данном узле. В
системе реального времени это время является фиксированным и
называется временем исполнения.
Существуют два способа передачи информации по сети:
1. Передача виртуального маркера (Token Ring)
2. Случайный доступ к среде с устранением коллизий (Ethernet,
Cisma/CA)
Передача виртуального маркера