ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 6696
Скачиваний: 11
31
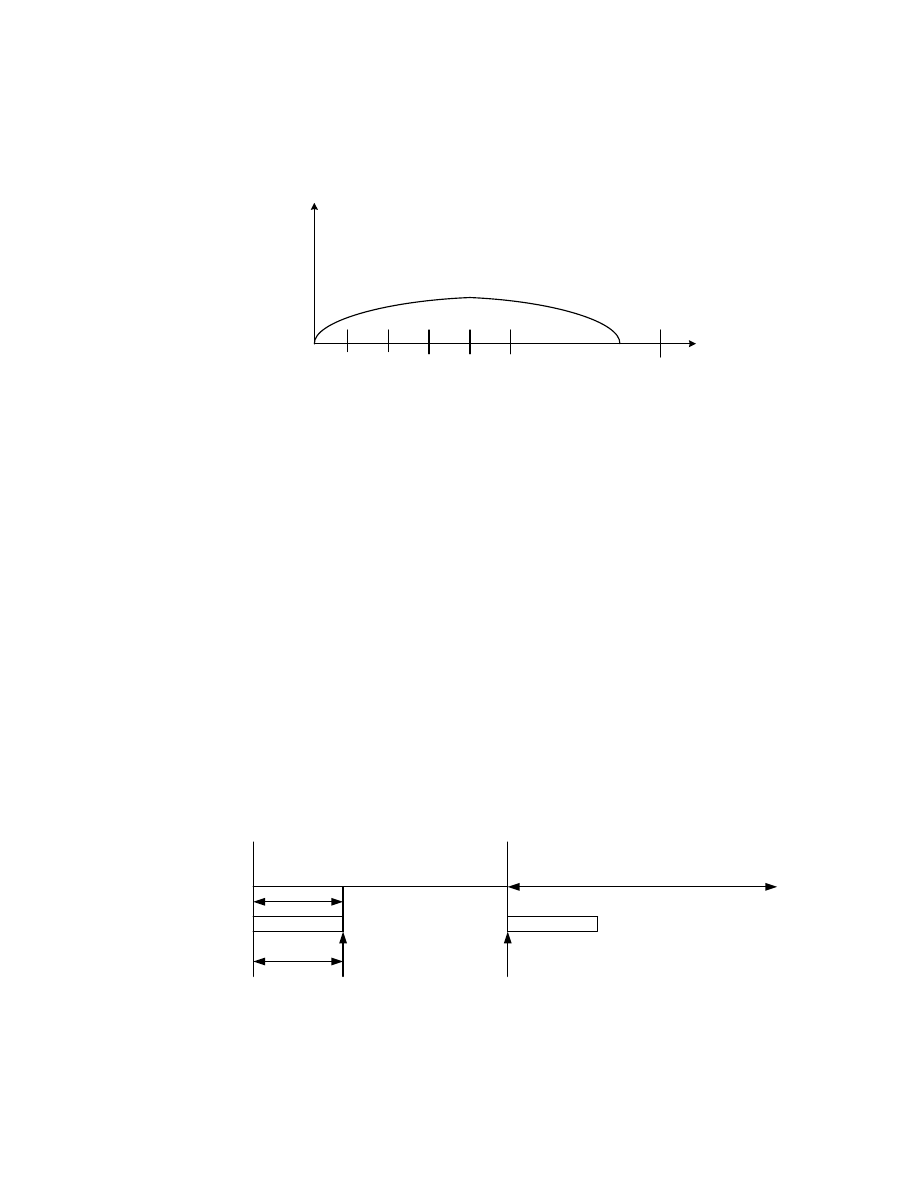
В данном случае система имеет детерминированное поведение,
зависящее от скорости передачи информации и количества
сообщений.
T2
T3
T4
T
системы
Т1
Tmax
задержки (гарантированное время) = T системы
Рис.16.
Это время будет гарантированным при условии, что все
процессы и все задачи являются периодическими. Задержка может
возникнуть для апериодических запросов.
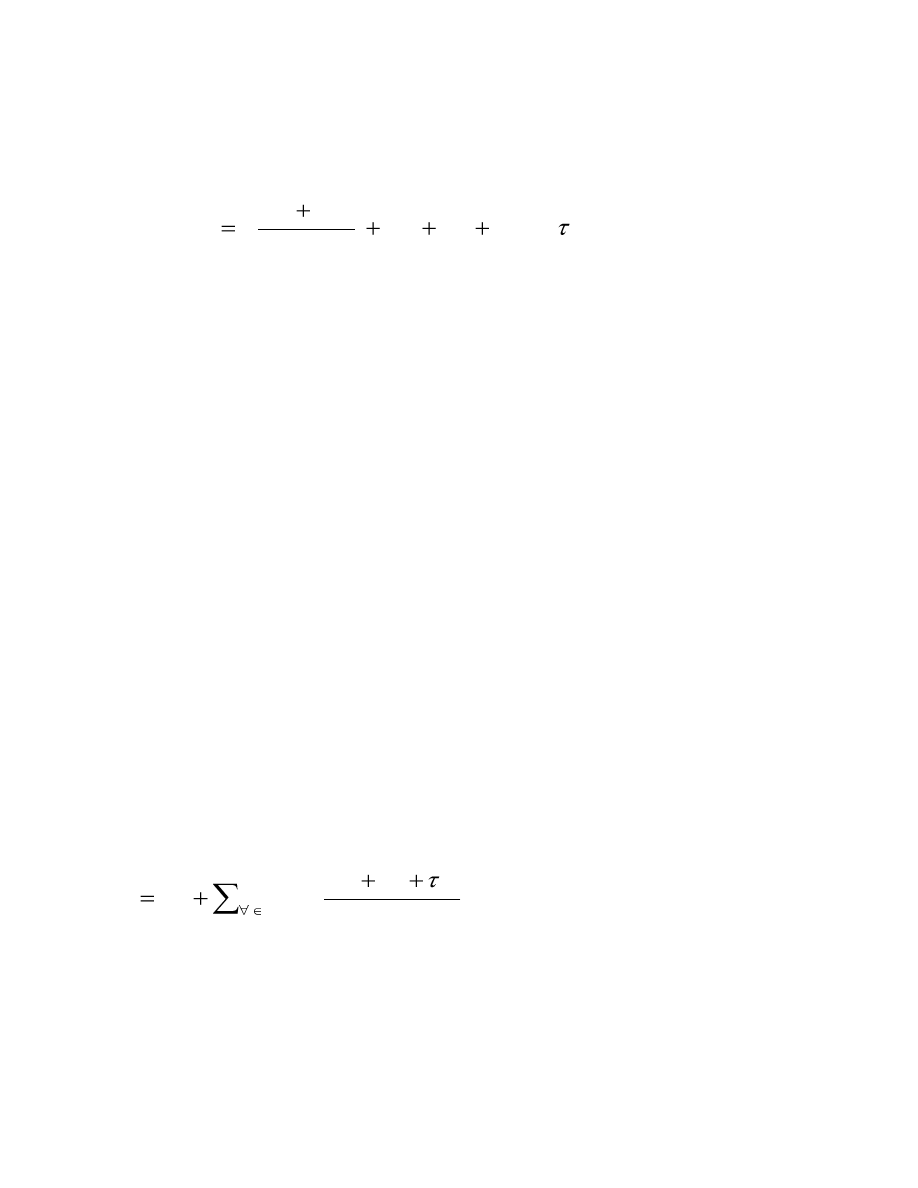
Проблема моделирования сетей при случайном доступе
При доступе узла к среде непосредственно при передаче
информации проверяется занятость канала. Если канал занят, то
сообщение ставится в очередь в соответствии с его приоритетом и
отправляется только при освобождении канала (параметр t
3
). Этот
параметр называется jitter и является разбросом постановки
сообщения в очередь. Параметр определяется пользователем, для
каждого сообщения выбирается он отдельно.
T
м
T
м
Jm
a
b
Тотправки
сообщения
Рис.17.
Т
з
= Т
м
-
Т
отпр.сообщ
, где Т
м
– время передачи,

32
J
m
= Т
отпр.сообщ.
или J
m
≠ Т
отпр.сообщ.
J
m
определяет возможность отправки сообщения в заданный
цикл.
J
m
+ Т
отпр.сообщ.
< Т
м
Разброс передачи сообщения в системах со случайным доступом
необходим для обеспечения гарантированного времени передачи.
D
m
– крайний критический срок исполнения. Он определяет
время, до которого текущая передача сообщения является актуальной.
При превышении D
m
сообщение должно быть отброшено.
Суммарно для систем со случайным доступом требуется
получение неблагоприятного времени ответа R
m
, то есть времени по
истечении
которого
система
не
может
гарантировать
функционирование в режиме РВ.
R
m
= J
m
+ W
m
+ C
m
, где m – сообщение.
Если R
m
тек
> R
m
расчет
, то невозможно функционировать в системе
РВ.
C
m
– максимальное время физической посылки сообщения m по
шине.
C
m
включает:
1.
t
перед.дан.
– время передачи информации по шине (полезная
информация).
2.
t
перед.наклад.расходов
– время передачи накладных расходов.
Накладные расходы – это биты информации, необходимые для
передачи сообщения в защищённом виде, для указания источников и
приёмников
информации,
CRC-
кода
и
информации
для
аутентификации.
3.
t
перед.дополн.данных
-
время передачи дополнительных данных.
33
Дополнительные данные – это информация, определяемая
протоколом передачи данных. Служит для передачи основной и
накладной информации.
bit
m
д
д
р
н
д
д
m
р
н
m
S
t
t
t
S
t
C
*
)
8
]
8
([
.
.
.
.
.
.
.
.
S
m
– представляет размер сообщения в байтах.
τ
bit
– такт передачи шины.
Соответственно этот параметр зависит от протокола передачи
информации, скорости передачи и длины сообщения.
W
m
– задержка организации очереди сообщений.
,
где hp(m) – множество сообщений с приоритетом более высоким,
чем у сообщения m;
lp(m)
– множество сообщений с приоритетом более низким, чем у
текущего сообщения.
W
m
= W
0
= 0
W
1
=1
W
2
=2 = W
1
+E
Wm
является рекурсивным, так как при учёте задержек
следующих сообщений
необходимо учитывать
задержки, полученные в
результате формирования предыдущих сообщений.
Если у сообщения такой же приоритет, то помещается в hp(m).
B
m
= max (C
k
)
j
j
bit
j
m
m
hp
j
m
m
C
T
J
W
B
W
*
]
[
)
(
34
k
lp(m
), где C
k
– время физической посылки сообщения.
B
m
– максимальное время, на которое может задерживаться
текущее сообщение более низкими по приоритету сообщениями.
В момент передачи более высокоприоритетного сообщения шина
может быть занята сообщением с более низким приоритетом. Для
передачи текущего сообщения требуется ожидание, равное времени
передачи сообщения.
Если lp(m) → ∞, то B
m
= 130τ – это наихудшее время, за которое
должно отправиться текущее сообщение.
T
j
– период передачи сообщения.
Для получения результата: W
m
0
= 0 нет никаких задержек.
Для высокоприоритетного сообщения: W
1
= B
m
= 130τ
Приведённый алгоритм не учитывает возможность ошибок при
передаче информации по сети.
Для
эффективности
использования
данного
алгоритма
рекомендуется назначать приоритеты сообщений по принципу D - J,
R
m
.
j
j
bit
j
m
n
m
hp
j
m
n
m
C
T
J
W
B
W
*
]
[
)
(
1

35
Алгоритм оценки
Позволяет понять: работоспособна система или нет.
Если выполняется неравенство R<D-J, то система является
устойчивой для функционирования в режиме РВ. Расчёт должен
проводиться для разных скоростей передачи информации по шине.
Реальная скорость зависит от типа принимаемого протокола:
Rm : 125, 250, 500, 1000 кб/сек
При наличии ошибок при передаче информации формула
расчёта должна учитывать функцию ошибки:
E
m
– функция максимального времени восстановления системы
после появления ошибки.
n
er
– число ошибок, которые могут произойти в заданном
интервале времени (t).
Ter
– остаточный период ошибки. Это время, показывающее
интервал, до которого новые ошибки появиться не могут.
er
T
t
– общее количество ошибок за время t.
М – это количество данных, потерянных в результате ошибки.
max (c
k
)
– максимальная задержка.
Если n=4, T=10мсек при V=1Мбит/сек, то частота появления
ошибок=1бит/10000 (1 ошибка за 10000 переданных битов)
Оценка разработанной модели производится по 3 параметрам:
)
(
]
[
)
(
m
m
m
j
bit
j
m
m
hp
j
m
m
C
W
E
T
J
W
B
W
)
(
max
(
*
)
1
]
[
(
)
(
)
(
k
m
m
hp
k
er
er
m
C
M
T
t
n
t
E