ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.09.2020
Просмотров: 2939
Скачиваний: 35
СОДЕРЖАНИЕ
Топография с основами геодезии
6.1. Непосредственное измерение расстояний
По теореме синусов определяют расстояние L.
Расхождение между L1 и L2 допускается в пределах 1/1000 ÷ 1/3000 от средней длины L.
6.3. Измерение расстояний оптическими дальномерами
Математическая обработка включает два вида работ: вычислительную и графическую (построение профиля).
Определим разность между длиной касательной S и длиной дуги S1. Выразим угол a в радианах, тогда согласно рис. 2.7 получим, что S = R × tga, а S1 = R×a. Откуда следует, что
DS = R(tga -a). (2.1)
Центральный
угол a по своей
величине незначителен. Поэтому при
разложении tga
в убывающий ряд можно ограничиться
вторым членом ряда и пренебречь
последующими из-за их незначительности.
Тогда
![]() .
Подставим это значение в формулу 2.1. В
результате получим, что
.
Подставим это значение в формулу 2.1. В
результате получим, что
![]() .
(2.2)
.
(2.2)
Из формулы S1=R×a
получим, что
![]() и заменим a в
формуле 2.2. Окончательно найдем,
что
и заменим a в
формуле 2.2. Окончательно найдем,
что
![]() .
(2.3)
.
(2.3)
Из
рис. 2.7 видно, что точка D находится
на уровенной поверхности и ее высота
равна нулю. Определим величину отрезка,
характеризующего отклонение точки Q
от уровенной поверхности. Для этого
рассмотрим прямоугольный треугольник
OCQ, откуда (R + h)²
= S² +
R². Упростив
данное равенство, имеем
![]() .
Ввиду малого значения h
в сравнении с 2R окончательно
получим, что
.
Ввиду малого значения h
в сравнении с 2R окончательно
получим, что
![]() .
(2.4)
.
(2.4)
Сравнивая формулы 2.3 и 2.4 видно, что значение h существенно больше DS. Если условно принять радиус Земли постоянным, то можно вычислить расхождения DS между длинами дуг на уровенной поверхности и их проекциями на плоскость, а также отклонения высот точек h от их положения на поверхности сферы из-за кривизны Земли (табл. 2.2).
Таблица 2.2
|
S , км |
DS ,м |
h, м |
|
1 |
0,00 |
0,08 |
|
5 |
0,00 |
1,96 |
|
10 |
0,01 |
7,85 |
|
20 |
0,07 |
31,39 |
|
50 |
1,02 |
196,20 |
Значение величины DS возрастает незначительно. При дуге 11 км DS составляет лишь 1:1 000 000 ее длины. Относительная погрешность измерения расстояний современными приборами составляет порядка 1:1 000 000. Поэтому принято считать, что участок радиусом 11 км можно принимать за плоскость, а при определении превышений между точками местности необходимо вводить поправку h.
2.5.
Cистемы координат, применяемые в
топографии
и геодезии
Координаты – это величины, определяющие положение любой точки на поверхности или в пространстве в принятой системе координат. Система координат устанавливает начальные (исходные) точки, линии или плоскости для отсчета необходимых величин – начало отсчета координат и единицы их исчисления. В топографии и геодезии наибольшее применение получили системы географических, прямоугольных, полярных и биполярных координат.
Г
Рис. 2.8. .8)
применяются для определения положения
точек поверхности Земли на эллипсоиде
(шаре). В этой системе координат исходными
являются плоскость начального меридиана
и плоскость экватора. Меридианом
называют линию сечения эллипсоида
плоскостью, проходящей через данную
точку и ось вращения Земли. Параллелью
называют линию сечения эллипсоида
плоскостью, проходящей через данную
точку и перпендикулярную земной оси.
Параллель, плоскость которой проходит
через центр эллипсоида, называется
экватором. Через каждую точку,
лежащую на поверхности земного шара,
можно провести только один меридиан и
только одну параллель.
.8)
применяются для определения положения
точек поверхности Земли на эллипсоиде
(шаре). В этой системе координат исходными
являются плоскость начального меридиана
и плоскость экватора. Меридианом
называют линию сечения эллипсоида
плоскостью, проходящей через данную
точку и ось вращения Земли. Параллелью
называют линию сечения эллипсоида
плоскостью, проходящей через данную
точку и перпендикулярную земной оси.
Параллель, плоскость которой проходит
через центр эллипсоида, называется
экватором. Через каждую точку,
лежащую на поверхности земного шара,
можно провести только один меридиан и
только одну параллель.
Географические координаты – это угловые величины: долгота l и широта j.
Географической долготой l называется двугранный угол, заключенный между плоскостью данного меридиана (проходящего через точку В) и плоскостью начального меридиана. За начальный (нулевой) меридиан принят меридиан, проходящий через центр главного зала Гринвичской обсерватории в пределах г. Лондона. Для точки В долгота определяется углом l = WCD. Счет долгот ведут от начального меридиана в обе стороны – на восток и на запад. В связи с этим различают западные и восточные долготы, которые изменяются от 0° до 180°.
Географической широтой j называется угол, составленный плоскостью экватора и отвесной линией, проходящей через данную точку. Если Землю принимать за шар, то для точки В (рис. 2.8) широта j определяется углом DCB. Широты, отсчитываемые от экватора к северу, называются северными, а к югу – южными, они изменяются от 0° на экваторе до 90° на полюсах.
Географические координаты могут быть получены на основании астрономических наблюдений или геодезических измерений. В первом случае их называют астрономическими, а во втором – геодезическими (L – долгота, B – широта). При астрономических наблюдениях проецирование точек на поверхность относимости осуществляется отвесными линиями, при геодезических измерениях – нормалями. Поэтому величины астрономических и геодезических координат отличаются на величину уклонения отвесной линии.
Использование разными государствами различных референц-эллипсоидов приводит к различиям координат одних и тех же пунктов, вычисленных относительно разных исходных поверхностей. Практически это выражается в общем смещении картографического изображения относительно меридианов и параллелей на картах крупного и среднего масштабов.
П рямоугольными
координатами (рис. 2.9)
рямоугольными
координатами (рис. 2.9)
называются линейные величины – абсцисса и ордината, определяющие положение точки на плоскости относительно исходных направлений.
В
Рис. 2.9
Прямая ХХ (ось абсцисс) совмещается с направлением меридиана, проходящего через начало координат, или с направлением, параллельным некоторому меридиану. Прямая YY (ось ординат) проходит через точку О перпендикулярную оси абсцисс. В такой системе положение точки на плоскости определяется кратчайшим расстоянием до нее от осей координат. Положение точки А определяется длиной перпендикуляров Xа и Yа. Отрезок Xа называется абсциссой точки А, а Yа – ординатой этой точки. Прямоугольные координаты обычно выражаются в метрах. Осями абсцисс и ординат участок местности в точке О делится на четыре четверти (рис. 2.9). Название четвертей определяется принятыми обозначениями стран света. Четверти нумеруются по направлению хода часовой стрелки: I – СВ; II – ЮВ; III – ЮЗ; IV – СЗ.
В табл. 2.3 показаны знаки абсцисс Х и ординат Y для точек, находящихся в разных четвертях и даны их названия.
Таблица 2.3
|
Угол направления, градус |
Четверть |
Знаки координат |
|
|
Х |
У |
||
|
0 – 90 |
I – СВ |
+ |
+ |
|
90 – 180 |
II – ЮВ |
– |
+ |
|
180 – 270 |
III – ЮЗ |
– |
– |
|
270 - 360 |
IV – СЗ |
+ |
– |
Абсциссы точек, расположенные вверх от начала координат считаются положительными, а вниз от нее – отрицательными, ординаты точек, расположенные вправо – положительными, влево – отрицательными. Система плоских прямоугольных координат применяется на ограниченных участках земной поверхности, которые могут быть приняты за плоские.
Рис. 2.10
Система биполярных координат (рис. 2.11) представляет собой два выбранных неподвижных полюса О1 и О2 , соединенные прямой – полярной осью. Данная система координат позволяет определить положение точки М относительно полярной оси на плоскости при помощи двух углов b1 и b2, двух радиусов-векторов r1 и r2 или их комбинаций. Если известны прямоугольные координаты точек О1 и О2 , то положение точки М можно вычислить аналитическим способом (см. 7.4).
|
|
|
Рис. 2.11 |
Рис. 2.12 |

.
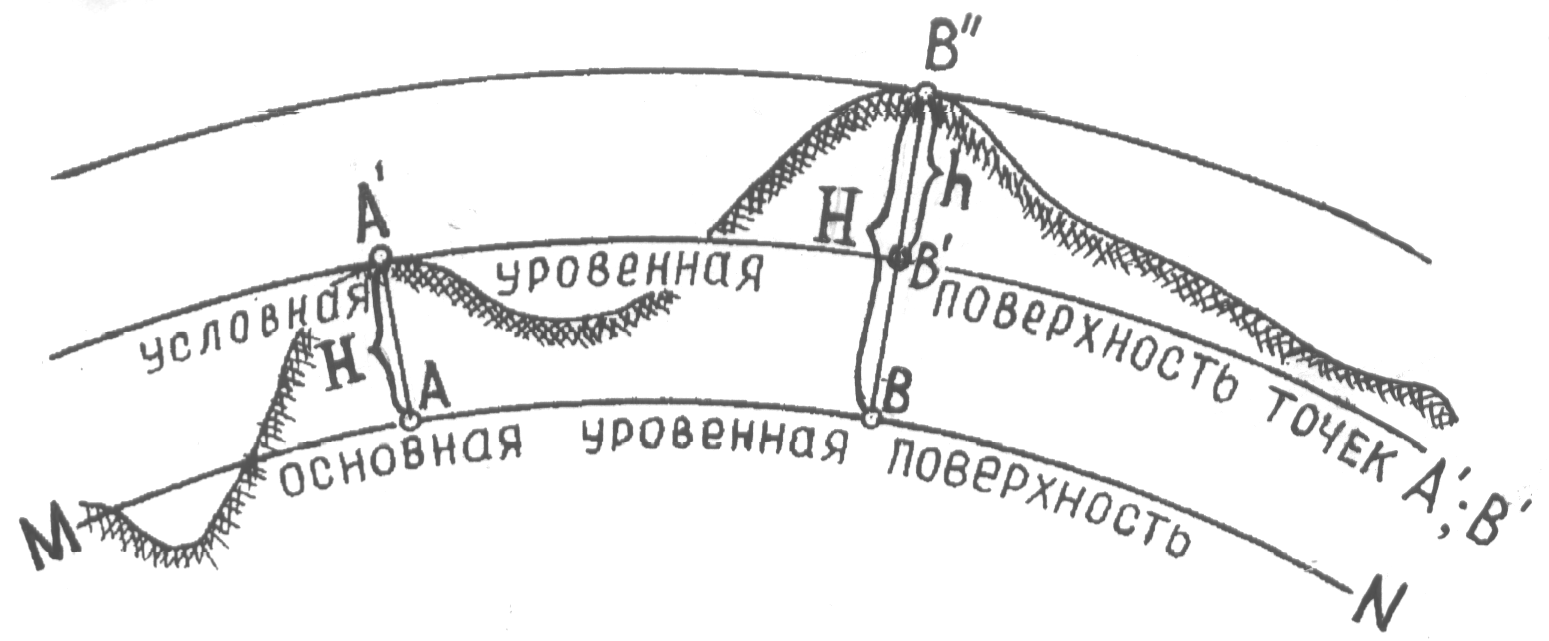
Высоты точек земной поверхности. Для определения положения точек физической поверхности Земли недостаточно знать только плановые координаты X, Y или l, j, необходима третья координата – высота точки Н. Высотой точки Н (рис. 2.12) называется расстояние по отвесному направлению от данной точки (А´; В´´) до принятой основной уровенной поверхности MN. Числовое значение высоты точки называется отметкой. Высоты, отсчитываемые от основной уровенной поверхности MN, называют абсолютными высотами (АА´; ВВ´´), а определяемые относительно произвольно выбранной уровенной поверхности – условными высотами (В´В´´). Разность высот двух точек или расстояние по отвесному направлению между уровенными поверхностями, проходящими через две любые точки Земли называется относительной высотой (В´В´´) или превышением этих точек h.
В Республике Беларусь принята Балтийская система высот 1977 г. Счет высот ведется от уровенной поверхности, совпадающей со средним уровнем воды в Финском заливе, от нуля Кронштадского футштока.
2.6.
Ориентирование направлений в топографии
и геодезии
Ориентировать линию местности – значит определить ее направление относительно другого направления принятого за исходное. В топографии и геодезии исходными направлениями для ориентирования приняты географический меридиан, магнитный меридиан и осевой меридиан геодезической зоны, которые на топографических картах соответственно обозначаются: – линией со звездочкой (); – линией со стрелкой () и линией с угольником на конце (U) .
Направление географического меридиана получают из астрономических наблюдений, а направление магнитного меридиана определяет свободно подвешенная и уравновешенная магнитная стрелка. Магнитная ось стрелки в каждой точке земной поверхности совпадает с направлением магнитного меридиана этой точки.
Географическим азимутом А направления, называется горизонтальный угол А, измеренный по ходу часовой стрелки от северного направления географического меридиана, проходящего через данную точку до ориентируемой линии (рис. 2.13). По абсолютному значению азимуты изменяются от 0 до 360°. На рисунке горизонтальные углы А1, А2, А3, А4 будут географическими азимутами ориентируемых направлений О1; О2; О3; О4. Точка О – начало ориентируемых направлений; а линия СЮ – географический меридиан точки О.
|
|
|
Рис. 2.13 |
Рис. 2.14 |


Магнитным азимутом направления называется горизонтальный угол Ам между северным направлением магнитного меридиана и направлением данной линии, отсчитываемый по ходу часовой стрелки (рис. 2.14). Вследствие не совпадения географических и магнитных полюсов магнитный и географический меридианы в данной точке земной поверхности образуют между собой угол d, называемый склонением магнитной стрелки (рис. 2.14).
Магнитное склонение может быть восточным – положительным, если северное направление магнитного меридиана находится к востоку от географического и западным – отрицательным, если северное направление магнитного меридиана проходит к западу от географического. Зависимость между географическим и магнитным азимутами выражается формулой А = Ам + d.
Склонение магнитной стрелки изменяется в зависимости от места и времени. Различают: суточные, годовые и вековые изменения склонения. Кроме того, величина склонения изменяется под влиянием магнитных бурь, связанных с полярным сиянием, солнечной активности, землетрясений, в районах магнитных аномалий и т. д. Суточные колебания склонения магнитной стрелки не превышают 5–15¢. Вследствие этого, ориентирование по магнитному азимуту проводится лишь в тех случаях, когда не требуется большая точность.
В топографии и геодезии применяется также ориентирование направлений относительно северного направления оси абсцисс в системе прямоугольных координат. Угол, отсчитываемый от северного направления оси абсцисс или линии параллельной ему до данного направления, по ходу часовой стрелки называется дирекционным углом a (рис. 2.15). Дирекционный угол изменяется от 00 до 3600.
|
|
|
Рис. 2.15 |
Рис. 2.16 |


Угол между географическим меридианом данной точки и северным направлением оси абсцисс (вертикальной линией координатной сетки) называется сближением меридианов g (рис. 2.15). Сближение меридианов бывает восточным со знаком плюс и западным со знаком минус. При восточном сближении меридианов, линии параллельные осевому меридиану отклоняются к востоку от географического меридиана, проходящего через эту точку, а при западном – к западу. Зависимость между географическим азимутом и дирекционным углом выражается формулой А = a + g.
Для
того чтобы перейти от дирекционного
угла к магнитному азимуту необходимо
знать две величины – склонение магнитной
стрелки и сближение меридианов. Данные
об этих величинах в виде графика и текста
помещаются под южной рамкой топографической
карты. Магнитный азимут равен разности
дирекционного угла и поправки направления
Ам = a
– П. Поправка направления П –
это угол между магнитным меридианом и
северным направлением оси абсцисс.
Поправка вычисляется по формуле
![]() .
.
Иногда ориентирование линии выражается острыми углами – румбами r. Румбом называют острый угол, отсчитываемый от ближайшего направления меридиана (северного или южного) до данной линии (рис. 2.16). Румбы имеют значения от 0° до 90° и сопровождаются названием четверти в которой проходит линия. Румбы переводят в азимуты и дирекционные углы и наоборот (табл. 2.4).
Таблица 2.4
|
Четверть |
Название четверти |
Связь между азимутами и румбами |
|
|
I |
СВ |
A1 = r1 |
r1 = A1 |
|
II |
ЮВ |
А2 = 180º - r2 |
r2 = 180º - А2 |
|
III |
ЮЗ |
А3 = 180º + r3 |
r3 = А3 - 180º |
|
IV |
СЗ |
А4 = 360º - r4 |
r4 = 360º - А4 |
Зависимость между азимутами или дирекционными углами и румбами линий, расположенных в разных четвертях, устанавливают по формулам.
-
Связь между полярной и прямоугольной
системами координат
В геодезии угловые измерения выполняются в полярной системе координат, а нанесение на карту пунктов и объектов местности более точно производится по их прямоугольным координатам. Перевычисление полярных координат к прямоугольным и наоборот производится по формулам прямой и обратной геодезических задач (рис. 2.17).
Прямая геодезическая задача состоит в том, что по известным координатам точки А (ХА;YА), горизонтальному проложению S линии АВ и дирекционному углу , вычисляют приращения координат х ; у и координаты точки В (ХВ;YВ). Приращениями координат х и у называются разности координат конечной В и начальной А точек линии АВ. Значения приращений определяются из прямоугольного треугольника АВС по заданным S и : х= S cos ; у = S sin . В зависимости от названия четверти прямоугольной системы координат приращения х и у имеют определенные знаки (см. табл. 2.3).