Файл: Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2020
Просмотров: 6011
Скачиваний: 170
---2008216.png)
Вычисление оценок σ
Λ
для определенных исходных данных (Д
т а х
= 650 км,
Д
т
|
п
= 5 0 к м , σ =0,5°) проведено методом статистических испытаний для
шести вариантов траектории излучающих объектов и двух вариантов траекто
рий комплекса, которые показаны на рис. 4.17.
Рис. 4.17
На рис. 4.18, а и 4.19, а приведены выраженные в процентном отношении
от дальности до излучающих объектов зависимости значений σ
0
, обеспечивае
мые алгоритмом сопровождения пеленговых траекторий, на рис. 4.18, б и
4.19, б для сравнения показаны потенциальные значения а
д
, полученные в ре
зультате вычисления информационной матрицы.
Рис. 4.18
---2008217.png)
Рис. 4.19
Обобщенная блок-схема алгоритма самотриангуляции, выполненного в
соответствии с приведенными выше расчетными соотношениями, показана на
рис. 4.20.
Рис. 4.20
Таким образом, для достижения высокой точности оценки параметров
траекторий сопровождаемых ИЦ требуется либо введение длительного интер
вала обработки измерений в БРЛС, либо реализация, как минимум, асинхрон
ного режима обмена пеленговой информацией между взаимодействующими
комплексами. При полностью автономной работе формируемая траектория
АК РЛДН должна обеспечивать максимизацию изменения (по модулю) прово
димых измерений пеленгов, осуществляемых в дискретные моменты времени.

4.5. Метод защиты от ответных импульсных помех,
основанный на совместном применении
разностно- и суммарно-дальномерного способов
определения координат
Ответной реакцией на излучение зондирующего сигнала БРЛС может
быть не только отраженный сигнал от воздушного объекта, но и излученные
целью активные радиопомехи индивидуальной защиты, что также демаскирует
разведываемый объект. В связи с этим, предполагая наличие подобной реакции
от цели, излучение зондирующих сигналов может выполняться не только для
анализа отражений зондирующего сигнала, но также и с целью формирования
разведываемым объектом ответных излучений. Применение станций РТР в со
ставе информационных датчиков АК РЛДН предоставляет дополнительные
возможности по обнаружению объектов по их излучениям, детальному анализу
помеховой обстановки и реализации многопозиционных активно-пассивных
способов радиолокации.
Излучающие РЭС, в том числе и постановщики имитирующих помех, мо
гут быть идентифицированы станцией радиотехнической разведки. При этом
возможно не только определение координат излучающих объектов, но и распо
знавание типов РЭС.
Совместное применение БРЛС с ФАР и станций РТР позволяет опреде
лить местоположение целей с использованием активных, активно-пассивных и
пассивных методов радиолокации, при этом возможна реализация многочис
ленных методов определения местоположения разведываемых объектов: даль-
номерно-угломерный, суммарно-дальномерный, разностно-дальномерный, уг
ломерно-угломерный и др.
Для определения местоположения излучающих объектов используются
многопозиционные комплексы радиотехнической разведки, состоящие из не
скольких станций РТР, или комплексирование информации от средств актив
ной радиолокации и станции РТР при групповых действиях АК РЛДН.
Дополнительные возможности по защите от активных помех появляются
при использовании информации от разнесенных источников. Применение разно-
стно-дальномерного или суммарно-дальномерного метода определения коорди
нат предполагает наличие, как минимум, одного источника всенаправленного
излучения зондирующих сигналов и трех разнесенных приемных устройств. Ес
ли излучение направленное, то достаточно двух разнесенных приемных пунктов
(в качестве одного из них может использоваться радиолокационная станция). То
гда определение координат выполняется по известному направлению излучения
и по оценке суммы или разности дальностей до обнаруживаемого объекта. Такой
метод может применяться в условиях постановки противником ответных им
пульсных помех группового прикрытия для обнаружения объектов, находящихся
за постановщиком помех относительно АК РЛДН.
Разность времен приема зондирующего сигнала пропорциональна разно
сти дальностей до излучающего объекта и однозначно определяет гиперболоид
возможных положений цели, от которой этот сигнал отражен или которая из
лучила сигнал. Направление излучения зондирующего сигнала позволяет одно
значно определить местоположение источника сигналов путем нахождения
точки пересечения с указанной гиперболой. Тем самым обеспечивается селекция
всех ложных отметок, создаваемых ПАП. Такой эффект наблюдается даже при
условии, когда помеха излучается антенной с широкой диаграммой направлен
ности и воздействует на приемные устройства всех элементов многопозицион
ной системы. В этом случае определяются также и координаты самого ПАП.
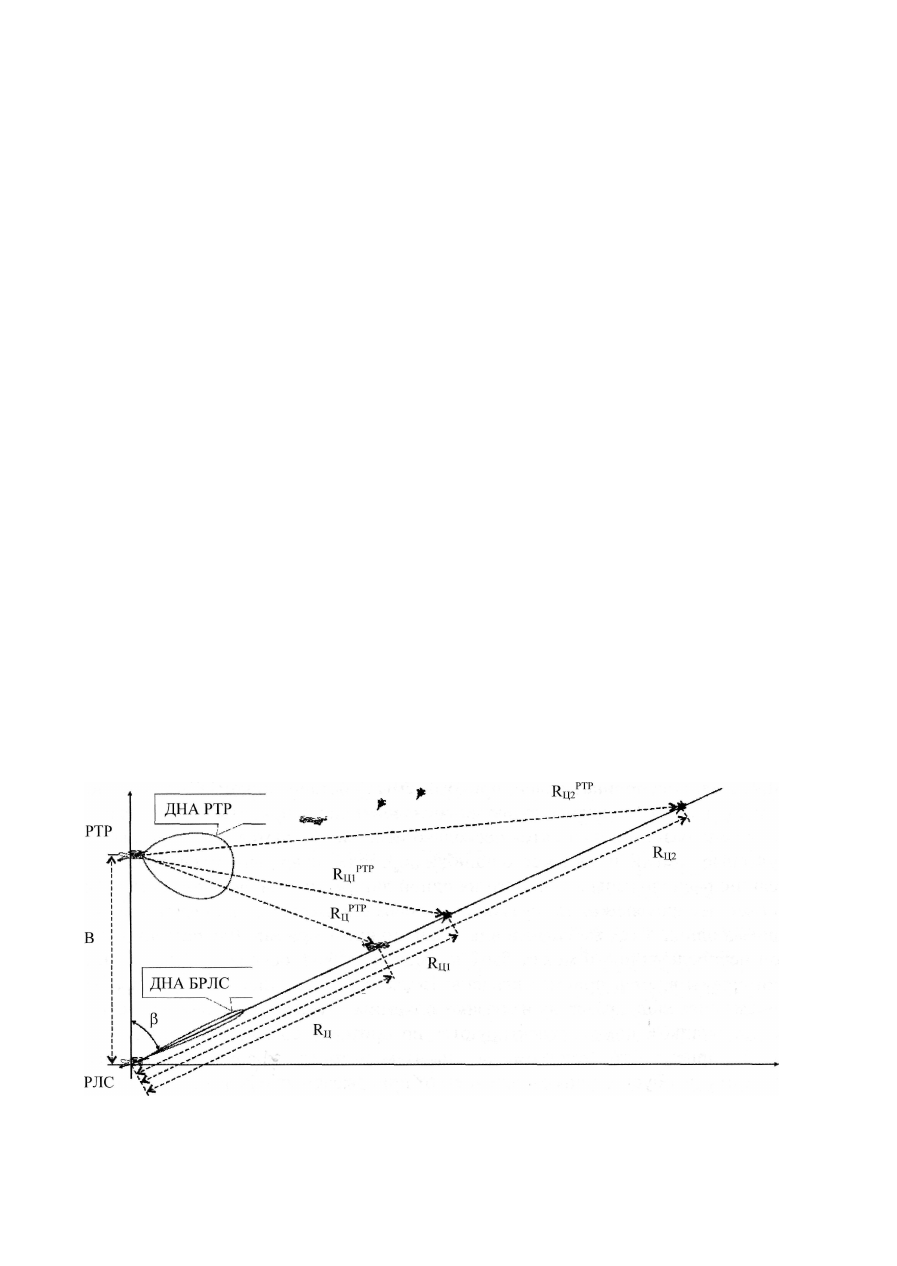
Принцип применения указанного способа селекции многократных им
пульсных имитационных помех рассмотрим на примере многопозиционной
системы, в которой используются БРЛС АК РЛДН в качестве приемо
передающего устройства с направленным излучением и вынесенная станция
РТР в качестве слабо направленного приемника излучений. Станция радиотех
нической разведки находится на расстоянии В от БРЛС, которое называется
базой многопозиционной системы. Без ограничения общности можно полагать,
что постановщик активных помех находится в направлении β
π
относительно
линии, соединяющей элементы многопозиционной системы и на дальности R
n
относительно БРЛС, а прикрываемые постановщиком помех объекты располо
жены вдоль линии визирования БРЛС-ПАП (рис. 4.21).
Рис. 4.21

За момент времени отсчета принимается момент излучения БРЛС зонди
рующего импульса. После этого БРЛС и станция РТР выполняют прием сигна
лов в течение времени, необходимого для прохождения излученным сигналом
расстояния до установленной максимальной дальности и обратно.
Время приема сигналов БРЛС, отраженных от целей, связано с расстояни
ем до целей соотношением , где с - скорость света, а время приема
импульсных помех, создаваемых постановщиком помех, где
t
3
- задержка в излучении помехи после обнаружения зондирующего сигнала
средством исполнительной радиотехнической разведки постановщика помех.
Зависимость времени приема отраженных от целей сигналов станцией РТР
имеет вид , а зависимость времени приема импульсных по
мех, создаваемых постановщиком помех,
Из указанных зависимостей следует, что при приеме сигналов, излучен
ных постановщиком помех, разность времени приема этих сигналов БРЛС и
РТР не зависит от времени задержки излучения помехи:
а при приеме зондирующих сигналов от целей разность этих времен определя
ется разностью расстояний до целей:
При уверенном приеме всех сигналов в АК РЛДН как станцией РТР, так и
БРЛС достаточно использовать разностно-дальномерно-угломерный метод для
определения координат целей, прикрываемых постановщиком помех, и самого
ПАП. Но когда возможны пропуски сигналов и число принятых сигналов вели
ко: в зоне разведки находится несколько целей и создаются многократные им
пульсные помехи, имеют место ошибки определения времени приема сигналов,
цели не расположены в точности на одной линии с постановщиком помех, воз
никает неопределенность, связанная с невозможностью сопоставить моменты
приема одних и тех же сигналов на обоих пунктах приема. Для разрешения та
кой неопределенности может быть применен подход, основанный на вычисле
нии суммы времен приема сигналов. После сопоставления моментов времени
приема сигналов, принятых на разных приемных пунктах, сигналы, излученные
постановщиком помех, селектируются по признаку совпадения разности вре
мен их приема, что дает возможность выявить только те зондирующие сигна
лы, которые обусловлены отражением от прикрываемых объектов.
Для оценки точности данного метода, рабочей зоны многопозиционной
радиолокационной системы, а также оптимизации этой рабочей зоны может