Файл: М. Х. Дулати атындаы Тараз ірлік университеті ке а.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 59
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Сондай-ақ, жоғары сызықтық тығыздықтағы иірілген жіпті орау кезінде иірілген жіптің көлденең қимасының ұлғаюына сәйкес спадикс қабатында орау қадамын көбейту керек, ал керісінше, аз сызықтық тығыздықтағы иірілген жіпті өндіру кезінде иірілген жіптің көлденең қимасының төмендеуіне сәйкес қабаттағы орау қадамын азайту қажет екенін ескеру қажет. Екі жағдайда да қабаттағы әрбір бұрылыс саңылаусыз және жүгірусіз көрші бұрылысқа жатуы керек.
БП-Ш-144 машинасындағы иірілген жіптің сызықтық тығыздығына байланысты бір ратчет берілісінің тістерінің саны қайда zмот смен ауыстырылатын тісті беріліс тістерінің саны; Т-жіптің сызықтық тығыздығы, текс.КОБ ұясының пайда болуы. Иірілген жіпті бос картриджге ораудың басында құлақ ұясы пайда болған кезде арнайы жұдырықша 7 (суретті қараңыз. 3) 8-блокта диаграммада көрсетілген позиция болады; бұл жағдайда тізбек блоктан da сызығы бойынша емес (КОБ денесі пайда болған кездегідей), бірақ D1 a сызығы бойынша шығады. айналмалы қолдың сағат тіліне қарсы бұрылуынан туындаған шама, 8 - блок кішірек бұрышқа бұрылады. Нәтижесінде сақина жолағының көтерілу биіктігі 11, демек, ұя пайда болған кездегі қабаттың биіктігі ең аз болады. Моторлы эксцентриктің және иінді механизмнің әр бұрылысында онымен бірге 18-ші ит 13-ші ратчетті бір беріліске тең (12-ден 21-ге дейін) белгілі бір тістер санына айналдырады. Бұл жағдайда 17 конустық берілістер, 14-құрт және 16-құрт берілісі арқылы сағат тіліне қарсы біршама бұрылады 16-құрт берілісімен бір осьте отырған 15-блок; содан кейін 8-блоктан 5-блокқа дейінгі бөлімдегі 6-тізбек біршама төмендейді; 8-блок сағат тіліне қарсы бұрылады, ал 10-тізбек 11-сақинаны сәл жоғары көтереді. Осылайша қабаттар жоғары қарай жылжиды. Айналмалы эксцентриктің әр бұрылысымен 1-ші айналмалы қолды сағат тілімен бұру кезінде 8-блок кішкене бұрышқа бұрылады; бұл ретте оның радиусы 6' тізбектің жойылу нүктесінде 7 жұдырықшасының профилінің арқасында кішірейеді. Демек, 11 сақиналы жолақтың көтерілу биіктігі артады. Жұдырықша 7 ' позициясын алған кезде (нүктелі сызықпен көрсетілген), 8-блоктың радиусы тұрақты болады, 5-блоктың түсуіне қарай тізбек 6-позицияны алады, сақина жолағының көтерілу биіктігі және құлақ қабатының биіктігі ең үлкен және тұрақты болады.
2.ТАРАУ. БП-114-Ш МАШИНАСЫНЫҢ ОРАУ МЕХАНИМІ
2.1. БП-114-Ш машинасындағы жылдамдықты автоматты түрде реттеу
Қозғалтқыш қысқыштарындағы кернеудің өзгеруі түрлендіргіштердің әртүрлі түрлерімен кең ауқымда жүзеге асырылады. Өзгерістің ең үлкен диапазоны тұрақты ток электр жетегіндегі тиристорлық немесе транзисторлық басқарылатын түзеткішпен (UFP) және айнымалы ток электр жетегіндегі МӨЖ қамтамасыз етеді.Түрлендіргіш-қозғалтқыш жүйелері механизмнің жылдамдығы мен орнын автоматты басқарудың күрделі мәселелерін шешеді (машиналарды бағдарламалық басқару, жоғары дәлдікпен сигналдарды өңдеу). Олар жылдамдық, кернеу немесе ток бойынша жабық түрде орындалады және өшіру немесе бұзылу үшін өтемақы принципі бойынша жұмыс істей алады.Жүйеге кері байланыстарды енгізу реттеу ауқымын кеңейтеді, оның тегістігін арттырады, жүйенің статистикалық және динамикалық қасиеттерін жақсартады, жұмыс сигналдарының дәлдігін, сондай-ақ электр жетегі жүйесінің тұрақтылығы мен жылдамдығын арттырады.
П-114-Ш Машинасы:
Осы машинаның электр жетегін басқару схемасында келесі ерекшеліктер ескерілген:
машинаны іске қосу кезінде ең үлкен үзіліс байқалатындықтан, мылжың ұстағыштың желдеткіші машинаның негізгі жетегіне қарағанда ертерек қосылуы тиіс; бұл ретте машинаның электр жетегі мылжың ұстағыштың желдеткішін үдеткеннен кейін ғана, ауа өткізгіштегі сирету мылжыңды сапалы ұстап алу мүмкін болатын мәнге жеткенде немесе ең жоғары белгіленген сирету мәніне жеткенде ғана қосылуы тиіс; мылжыңды машинаның негізгі жетегіне орап алмау машинаның органдары, яғни жүйеде сирету жұмыс органдары тоқтағанға дейін ең төменгі рұқсат етілген деңгейден төмен болмауы керек; электр жетегінің схемасында авариялық жұмыс режимдерінен (фазаның үзілуі, қысқа тұйықталулар, технологиялық шамадан тыс жүктемелер және т.б.) қорғау көзделуі, сондай-ақ машинаны авариялық тоқтату мүмкіндігі қамтамасыз етілуі тиіс.
оңтайлы іске қосуды жүзеге асыру мақсатында (баяу іске қосу ақауға әкеледі және машинаның өнімділігі төмендейді, ал жылдамырақ іске қосу - бұзушылықтың жоғарылауы) ауа өткізгіштегі сирету ең төменгі рұқсат етілген мәнге жеткен кезде, бұл кезде жоғары сапалы иілу пайда болады, тізбекке шекті кернеу сигнализаторы (SPR) енгізіледі. SPR ретінде сіз отандық құрылғыларды (мысалы, sdb - 11) пайдалана аласыз немесе оларды энергетикалық қызметтің күшімен жасай аласыз.
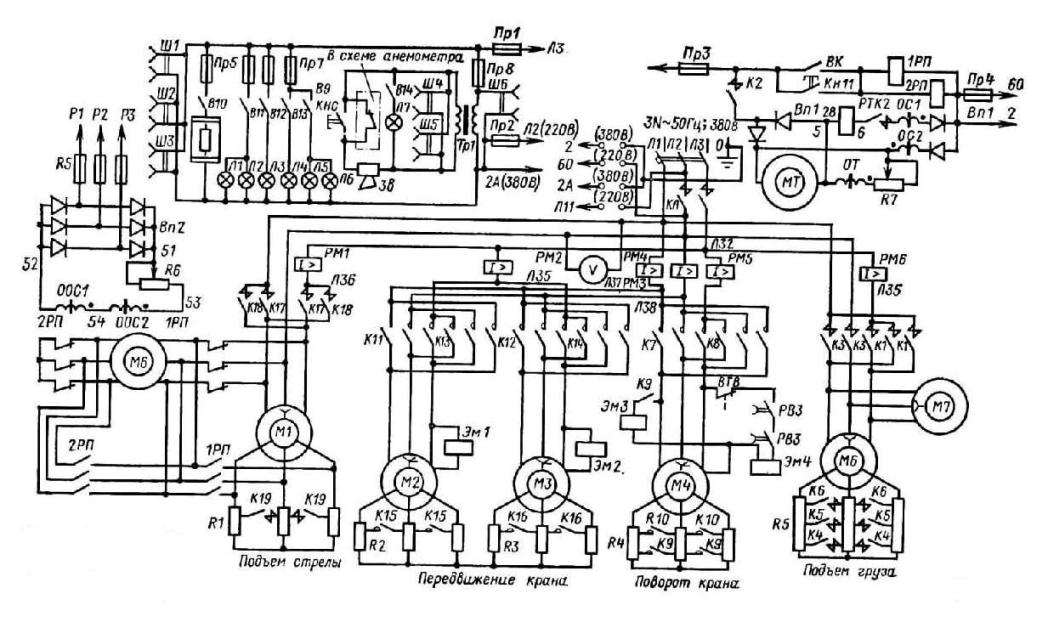
Суретте БП-114-Ш сақиналы Иіру машинасының автоматтандырылған электр жетегін басқару схемасы көрсетілген.
4-сурет-БП-114-Ш машинасының электр жетегін басқару схемасы
Тізбектің жұмыс принципі-QF ажыратқышын (A311 типі) қосқанда, басқару тізбегіне 380/127 B (60 Вт қуаты) TV трансформаторы арқылы кернеу беріледі. SB1 (SB2 және SB3) іске қосу түймесі басылған кезде SB4 (SB5 және SB6) тоқтату түймелерінің тізбегі арқылы кернеу және kk1 және KK2 жылу релесінің түйреуіштері K1 аралық релесінің катушкасына беріледі, оның жабылатын Түйреуіші VD диоды арқылы (D226V түрі) K2 аралық релесіне кернеу береді, оның Түйреуіші магниттік стартерді (pmea түрі) қамтиды-212) мичкоуловитель желдеткішінің М1 электр қозғалтқышының КМ1 (номиналды қуаты 4 кВт АО2-32-2 типті АҚ). Ауа өткізгіште қажетті сиретуге қол жеткізген кезде СПР контактілері жабылады және кернеуі 127 в м2 электр қозғалтқышының км2 (пай-300 типі) магниттік іске қосқышының катушкасына (аот2-63-4 типі номиналды қуаты 10 кВт) беріледі, оны іске қосады. Машинаны тоқтату SB4 (SB5, SB6) бекіту түймелерін басу арқылы жүзеге асырылады; бұл ретте К1, К2 аралық релелерінің және км2 магниттік стартердің қоректендіру тізбегі қамтамасыз етіледі, бұл машинаны тоқтата отырып жетекті ажыратуға әкеп соғады. Сонымен қатар, C1 конденсаторының разряды (K50 - 3 200h200 түрі) K2 релелік катушкасы арқылы басталады. К2 реле катушкасының босату кернеуіне тең конденсатордағы кернеуге жеткенде, ол өшеді және оның түйреуіштері КМ1 магниттік стартердің катушкасын ажыратады, бұл желдеткіштің АҚ тоқтауына әкеледі. Конденсатордың шамамен 2 с
болуына байланысты, бұл мылжың ұстағышқа машина тоқтағаннан кейін де өз функциясын орындауға мүмкіндік береді.
114-Ш-2а машинасы:
114-Ш-2а сақиналы иіру машинасы Ұзындығы 50-200 мм болатын 19-50 текс иірілген жіптерді жүннен, оның химиялық талшықтармен немесе таза химиялық талшықтармен қоспасынан жасауға арналған.Машинаның электр жетегіне төрт асинхронды қозғалтқыш кіреді, оның ішінде: М1-негізгі жетектің электр қозғалтқышы, М2 - мичкоуловательдің электр қозғалтқышы, м3-щеткалы траверстің электр қозғалтқышы.
5-сурет Б-114-Ш-2а машинасының электр жетегін басқару схемасы
Машинаны іске қосуды SF Автоматты қосқышы жүзеге асырады, содан кейін sb1 немесе SB2 "Мычкоуловитель" іске қосу батырмасын басады; магниттік стартерлер электр қозғалтқыштарын қосады; КМ5 - м2 мычкоуловитель, м3 салқындату вентилясы. SB3 немесе sb4 батырмасын басу арқылы КМ1 немесе КМ2 магниттік Стартер іске қосылады, негізгі жетектің М1 Электр қозғалтқышын іске қосу үшін км3 немесе КМ4 негізгі магниттік Стартер қосылады.
Схемада қолданылатын км2 контактілерінің тұйықталуын бұғаттау, егер м2 мичкоулователь мен м3 салқындатқыш желдеткіштің электр қозғалтқыштары қосылмаған жағдайда, негізгі жетектің М1 Электр қозғалтқышын іске қосу мүмкіндігін болдырмайды. Км7 және км8 магниттік стартерлері М4 щеткалы траверзаның Электр қозғалтқышын М1 негізгі жетектің электр қозғалтқышының айналымының жоғарылауы немесе төмендеуі кезінде оңға және солға ауыстыруға арналған. Қылқалам траверзасының электр қозғалтқышы қосылған кезде HL1 сигнал шамы жанады, бұл негізгі жетектің M1 электр қозғалтқышының айналу жиілігінің өзгеруін көрсетеді. Hl2 сигнал шамы пакеттің негізі мен шыңын қалыптастыру үшін қажет төмендетілген (0 - 25% берілген) айналымдарда машинаның жұмысын білдіреді.
Машинаны тоқтату sb5 немесе SB6 құлыптау түймесін басу арқылы жүзеге асырылады, оның біреуі алдыңғы баста, екіншісі машинаның артқы басында орналасқан. Соңғы ажыратқыштар қызмет етеді: sq1 - есікті құлыптау үшін, sq3 және SQ4 - жолақтарды түсіру үшін, sq5 және SQ6 - құлыптау үшін, sq7 және SQ8 - қылқалам траверсінің максималды және минималды жүрісі үшін, sq2 - сақина жолағының жоғарғы орнын бекіту үшін және sq9 - жарық дабылын қамтамасыз ету үшін.
Жылдамдық сенсорлары:
Сенсорға бір уақытта әртүрлі физикалық шамалар әсер етуі мүмкін (қысым, температура, ылғалдылық, діріл, ядролық реакция, магниттік және электр өрістері және т .б.), бірақ ол тек табиғи шама деп аталатын бір шаманы қабылдауы керек.Бұл қатынас Шығыс шамасы (шығыс сигналы) кіріс шамасының (шығыс сигналы) сызықтық функциясы болған кезде тұрақты болады. Егер сызықтық емес функция болса, онда осы сезімталдыққа қатысты нүктелер көрсетілуі керек. Кейбір жағдайларда сезімталдық статикалық сызықтық емес сипаттаманың екі сипаттамалық нүктесі арасындағы секанттық көлбеу түрінде ұсынылуы мүмкін.Статикалық сезімталдық ұғымы күшейту коэффициентіне ұқсас; градиент; сезімталдық коэффициенті.Сенсордың сезімталдығы, әдетте, кіріс және шығыс шамаларының сипатына байланысты әртүрлі өлшемдері бар аталған шама болып табылады.Сезімталдық ұғымын динамикалық жұмыс жағдайларына таратуға болады. Бұл жағдайда сезімталдық дегеніміз шығыс сигналының өзгеру жылдамдығының кіріс сигналының тиісті өзгеру жылдамдығына қатынасы:
Мерзімді, атап айтқанда синусоидалы сигналдар жағдайында сезімталдықты Шығыс пен кіріс амплитудасының қатынасы ретінде анықтауға болады.
Сенсордың сезімталдық шегі деп кіріс сигналының өзгеруіне әкелетін өлшенетін шаманың (кіріс сигналының) минималды өзгерісі түсініледі. Сенсор сапасының ең тән көрсеткіші-бұл қатынаспен көрсетілген сенсордың толық диапазоны
мұндағы-өлшеудің табиғи шегі; - сенсордың сезімталдық шегі.
Сенсорлардың әр түрі үшін сезімтал элементтің жұмыс принципімен және сипаттамаларымен анықталатын шаманың іс жүзінде қол жеткізуге болатын шегі бар.
Гистерезис кіріс шамасының жоғарылауы мен төмендеуі кезінде сенсордың статикалық сипаттамасының барысының түсініксіздігі деп аталады.
Серпімді элементтер үшін (мембраналар, серіппелер және т.б.) гистерезис ұғымын да қамтиды серпімді әсер.
Гистерезис жалпы жағдайда кездейсоқ қателіктерге жатады, өйткені оның мәні кіріс шамасының мәндерімен ғана емес, сонымен қатар сенсордың уақыт сипаттамаларымен де анықталады. Гистерезис пайызбен көрсетіледі
мұндағы-жұмыс шектеріндегі Шығыс шамасының өзгеруі.
Гистерезис датчиктерде серпімді элементтердегі ішкі үйкеліске, жылжымалы элементтердегі үйкеліске, сусымалылыққа (мысалы, желімделген жүктеме жасушаларында), магниттік гистерезиске және т. б. байланысты пайда болады.
Сенсордың негізгі қателігі-шығыс сигналының нақты мәні мен оның кіріс параметрінің шынайы мәніне сәйкес келетін шамасы арасындағы максималды айырмашылық. Бұл айырмашылық қалыпты жағдайда сенсордың статикалық сипаттамасымен анықталады және әдетте шығыс шамасының шекті мәндерінің айырмашылығына жатады:
Датчиктің қалыпты жұмыс жағдайлары: қоршаған орта температурасы ; атмосфералық қысым Па / мм сын. бағ. ; қоршаған ауаның салыстырмалы ылғалдылығы; гравитациялық ауадан басқа діріл мен өрістердің болмауы.
Датчиктің қосымша қателіктері-бұл сыртқы жағдайлардың қалыптыдан өзгеруінен туындаған қателіктер. Олар өлшенбейтін параметрдің өзгеруіне байланысты пайызбен көрсетіледі (мысалы, температура қатесі қосулы және т.б.).
Сенсордың бастапқы қателігі оның параметрінің есептік мәннен ауытқуы деп аталады:
мұндағы-параметрдің бастапқы қателігі ; - параметрдің есептік мәні; - түрлендіргіштің индексі (нөмірі); - параметрдің индексі (нөмірі).
Датчиктің бастапқы қателігі кіріс мәнінің берілген мәні бойынша Шығыс мәнінің оның есептік мәнінен ауытқуын тудырады . Бұл ауытқу әдетте сенсордың жеке қателігі деп аталады:
Сенсордың жалпы қателігі жеке қателіктердің қосындысы ретінде анықталады. Қорытындылау әдісі бастапқы қателіктердің табиғатымен анықталады.Жүйелі бастапқы қателіктер кезінде сенсордың жеке қателігі тәуелділікпен анықталады7Егер бастапқы қателер кездейсоқ болса, онда сенсор қатесінің шекті мәнін нақты қателіктердің шекті мәндерінің квадраттық қосындысымен анықтауға болады:
Әр түрлі физикалық параметрлерді өлшеу қателіктерін практикалық бағалау көбінесе жеке қателіктерді тудыратын бір мезгілде әрекет ететін тәуелсіз факторлардың көптігімен қиындайды.
Жылдамдық сенсорлары
Жылдамдық датчиктері әртүрлі салаларда кеңінен қолданылады, бүгінде әртүрлі принцип бойынша жұмыс істейтін және әртүрлі жағдайларда жұмыс істей алатын көптеген модельдер бар.Өнеркәсіптік өлшеу техникасы ағынның жылдамдығы мен жылдамдығын анықтаудың өте дәл әдістерін қажет етеді. Бұл жағдайда рұқсат етілген қателіктер бір пайыздан, кейде оннан бір пайыздан аспауы керек. Өте дәл ағын өлшегіштер кейде күнделікті өмірде де қажет (мысалы, газ есептегіш). Жақында доплердің оптикалық эффектісінде жұмыс істейтін оптоэлектронды ағын мен жылдамдық өлшегіштері пайда болды (2-суретті қараңыз), олар жарық шашырауының ерекше түрін пайдаланады.
Бұл жағдайда лазер сәулесі жарық бөлгіш тақтайшамен екі бөлек жарық сәулесіне бөлінеді, содан кейін олар ағып жатқан ортада линзаның көмегімен фокусталады. Содан кейін ағынмен шашыраған Жарық фотодетекторға (Фото мультипликатор) түседі, онда ол электр тогына айналады. Күшейтілген Доплер сигналы электронды түрде ағынға пропорционалды өлшеу кернеуіне айналады.