Файл: 1 Техническая часть 1 Техническая характеристика механизма передвижения тележки.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 117
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Техническая характеристика механизма передвижения тележки
Что касается кинематической схемы, то она представлена на рисунке 1.2, где
1.1.5 Технические требования к ЭП и схеме управления механизма передвижения тележки
Кн =1,25 коэффициент неравномерности распределения нагрузки на колеса.
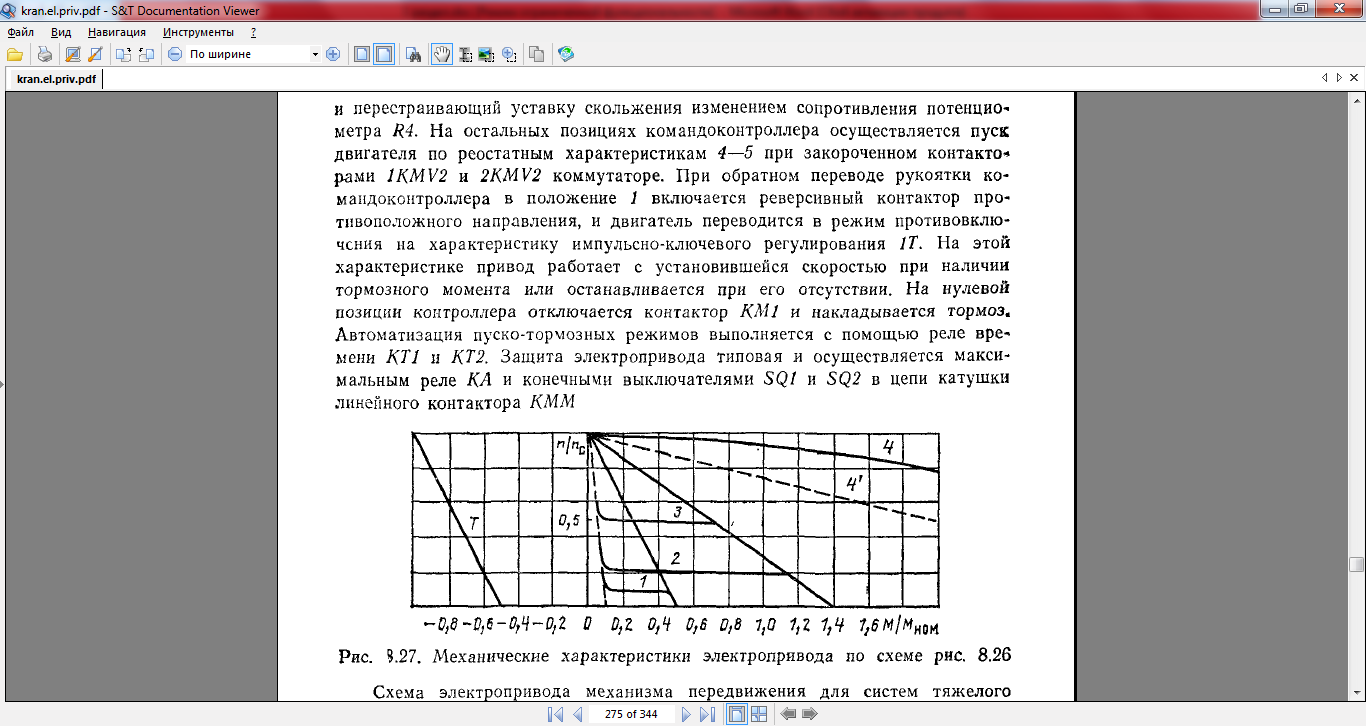
Рисунок 1.7 – Рабочие характеристики панели ТАИ60 М5
Используя рисунок 1.7 построим характеристики для выбранного двигателя. Момент номинальный для выбранного двигателя:
Согласно формуле (1.1) определим ωн:
Согласно формуле (1.1) определим ω0 :
Согласно формуле (1.51) определим Мн :
В таблице 1.3 и таблице 1.4 представлены значения параметров Мн ,ωн по которым построим характеристики выбранного двигателя.
Таблица 1.3 – Значения параметров Мн от ωн для движения в одну сторону
| Параметры | Тормоз | 1- характеристика | 2 - характеристика | ||||||
| М | -115 | -57.5 | 9,2 | 13,8 | 53 | 6,9 | 14 | 134 | |
| ω | 105 | 0 | 19 | 9,5 | 8 | 25 | 21 | 19 | |
| Параметры | 3 характеристика | 4- характеристика | 5- характеристика | | |||||
| М | 4,6 | 11,5 | 83 | 0 | 230 | 0 | 230 | | |
| ω | 57 | 48 | 46 | 105 | 76 | 105 | 48 | | |
Таблица 1.4 – Значения параметров Мн от ωн для движения в обратную сторону
| Параметры | Тормоз | 1’- характеристика | 2’ - характеристика | ||||||
| М | 115 | 57.5 | -9,2 | -13,8 | -53 | -6,9 | -14 | -134 | |
| ω | 105 | 0 | -19 | -9,5 | -8 | -25 | -21 | -19 | |
| Параметры | 3’-характеристика | 4’- характеристика | 5’- характеристика | | |||||
| М | -4,6 | -11,5 | -83 | 0 | -230 | 0 | -230 | | |
| ω | -57 | -48 | -46 | -105 | -76 | -105 | -48 | | |
По значениям из таблиц 1.3, 1.4 строим характеристики. Характеристики представлены на рисунке 1.8.
 Рисунок 1.8 – Рабочие характеристики панели ТАИ60 М5 для выбранного двигателя
Рисунок 1.8 – Рабочие характеристики панели ТАИ60 М5 для выбранного двигателя Где есть:
Ммин - момент статический минимальный (Мс2), когда тележка движется без груза;
Ммакс - момент статический максимальный (Мс1), когда тележка полностью загружена;
1,2,3,5 – характеристики механизма передвижения тележки при движении в одну сторону, соответствующие положением магнитного контроллера 1-4 (вправо);
1’,2’,3’,5’ – характеристики механизма передвижения тележки при движении в обратную сторону, соответствующие положением магнитного контроллера 1-4 (влево);
Т, Т’ – характеристики тормоза;
4, 4’ – промежуточные характеристики при переходе от 3 к 5, 3’ к 5’ соответственно.
1.3.5 Расчет и выбор электроаппаратуры. Выбираем командоконтроллер. Согласно [1] для выбранной панели управления приводом передвижения совместно скранвой панелью ТАИ60 5М применяются магнитные контроллеры ККП1100.
Выбираем крановый контроллер типа ККП1100 со следующими характеристиками:
а) номинальное напряжение, В - 220 переменного тока;
б) включаемый ток, А – 50;
в) отключаемый ток при напряжении 220В, А – 25;
г) механическая износостойкость, циклов – 10000000;
д) коммутационная износостойкость, циклов – 1000000;
е) частота включений в час – 60;
ж) масса командоконтроллера, кг – 9;
з) число рабочих положений: 4-0-4;
и) рукоятка – нормальная, фиксация в каждом положении.
Выберем магнитные пускатели КМ1-КМ5 по следующему условию:
 (1.52)
(1.52)где: Iном – ток работы силовых контактов, А;
Uном – напряжение катушки, А;
Uном.конт – напряжения работы силовых контактов, А.
В соответствии с (1.52) получаем:
Выбираем магнитные пускатели серии ПМЛ3500 со следующими параметрами.
Номинальное напряжение катушки – 220 В переменного тока.
Ток номинальный – 40 А.
Напряжение силовых контактов – 380 В переменного тока.
Количество контактов – 2р+2з.
Мощность катушки номинальная – 7,6 ВА.
Мощность катушки пусковая - 87 ВА.
Выберем реле времени КТ1-КТ2 по следующему условию:
В соответствии с (1.53) получаем:
Выбираем реле РВП72М-3121 00УХЛ3 (ТУ 16-90 ИГЛТ.647452.004 ТУ).
Напряжение питание катушек – 220 В переменного тока.
Диапазон регулирования времени – 0.3-3 с.
Потребляемая мощность – 30 ВА.
Выберем предохранитель FU1 из условия селективности работы аппаратов:
Uном≥ Uцепи упр.,
Iном. ≥ Iраб.макс+0.1·Iмакс.вкл . (1.54)
В соответствии с (1.54) получим:
Uном≥220В,
Iном. ≥5·0,04+2·0,13+0,1(5·0.4)=0.7 А
Выбираем предохранитель ПДС-1 ТУ 16-522.112-74 с параметрами:
Номинальный ток основания - 6 А.
Номинальное напряжение – 220 В.
Вставка плавкая со следующими параметрами:
Номинальный ток плавкой вставки - 1А.
Выберем реле максимального тока КА1 – КА3 по следующему условию:
где: Iсраб – ток срабатывания реле, А.
В соответствии с (1.55) получаем:
Выбираем реле максимального тока РЭО-401 УХЛ3 со следующими параметрами.
Номинальное напряжение втягивающей катушки – 220 В переменного тока.
Ток срабатывания – 100 А.
Количество контактов – 1р+1з.
Выберем разъединитель QS1. Он должен удовлетворять следующему условию:
где: Uконт – номинальное напряжение контактов аппарата, В;
Uсети – номинальное напряжение сети, Uсети=220В;
Iконт - номинальный ток контактов аппарата, А;
Iном - номинальный ток аппаратов, Iном.дв=0,7 А.
Кз – коэффиицент запаса по току, Кз=1,1.
В соответствии с (1.56) получаем:
Выбираем разъединитель ВР32- 35А21120 – 54 УХЛ3 со следующими параметрами:
Номинальное напряжение контактов – 220 В постоянного тока.
Номинальный ток контактов – 16 А.
Число полюсов и число направлений - двухполюсный выключатель-разъединитель на одно направление.
Защита от перехода механизмом предельных положений осуществляется конечными выключателями SQ1 и SQ2.
Выберем конечный выключатель типа ВК-200 со следующими параметрами:
Привод – механический с самовозвратом.
номинальное напряжение – 220 В переменного тока.
Продолжительный ток – 16 А.
Скорость передвижения механизма - 1-80 м/мин.
Число включений в час – 600.
Степень защиты – IP44.
Количество контактов – 1з.
Выбор электромагнитного тормоза YA1. При расчете тормозного устройства для передвижения тележки исключается условие, при котором может произойти скольжение колес по рельсам.
Определим тормозной моммент:
 (1.57)
(1.57)где: JХ.К. – момент инерции ходовых колес,
ωХ.К. – скорость вращения ходовых колес,
RК – радиус колеса, м;
rШ – радиус тормозящего шкива, м. Примем rШ=0,1 м.
В соответствии с (1.57) получим:
Находим необходимый тормозной момент с учетом коэффициента запаса торможения:
где: Кторм – коэффициент запаса торможения. Для тяжелого режима Кторм=2.
В соответствии с (1.58) получим:
Необходимое усилие на колодках:
где:
В соответствии с (1.59) получим:
Выбор тормозного электромагнита должен обеспечивать тяговое усилие FЭ и иметь достаточный ход якоря:
где: hЯ – ход якоря, м;