Файл: 1 Техническая часть 1 Техническая характеристика механизма передвижения тележки.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 118
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Техническая характеристика механизма передвижения тележки
Что касается кинематической схемы, то она представлена на рисунке 1.2, где
1.1.5 Технические требования к ЭП и схеме управления механизма передвижения тележки
Кн =1,25 коэффициент неравномерности распределения нагрузки на колеса.
где:
Максимальное значение статического сопротивления в соответствии с формулой (1.14):
Минимальное значение статического сопротивления в соответствии с формулой (1.14):
Среднее статическое усилие:
Согласно (1.15):
Статическое сопротивление при остановке:
Согласно (1.16):
Масса в момент остановки:
Согласно (1.17):
Отклонение массы:
Согласно (1.18):
Допустимое отклонение сопротивления торможения при останове:
Согласно (1.19):
Отклонение статического сопротивления:
Согласно (1.20):
Относительное отклонение ускорения:
(1.21)
Согласно (1.21):
Ускорение в процессе останова:
Согласно (1.22):
Путь при движении с максимальной скоростью:
где: ta – время срабатывания контактной аппаратуры, с. Примем ta=0,2 c.
Согласно (1.23):
Примем
 (1.24)
(1.24) (1.25)
(1.25)где:
Согласно (1.24):
Согласно (1.25):
Средняя скорость останова:
где:
KП – поправочный коэффициент. KП=1,1.
Согласно (1.26):
Отклонение скорости:
Согласно (1.27):
Максимальная скорость:
Согласно (1.28):
Минимальная скорость:
Согласно (1.29):
Максимальный путь:
Согласно (1.30):
Минимальный путь:
Согласно (1.31):
Отклонение пути при останове:
Согласно (1.32):
Определение диапазона регулирования скорости:
Согласно (1.33):
Необходимо обеспечивать диапазон регулирования скорости D=8
1.2 Разработка схемы электрической принципиальной силовой части электрооборудования
1.2.1 Выбор и обоснование системы ЭП механизма передвижения тележки. В данном случае нам необходимо рассмотреть несколько вариантов реализации регулируемого электропривода:
1) двигатель постоянного тока с последовательным возбуждением, путем шунтирования цепи якоря;
2) асинхронный двигатель с фазным ротором с импульсно-ключевым управлением по цепи ротора.
Выбрав несколько вариантов электропривода проведем их сравнительную оценку. Воспользуемся методом экспертных оценок. Сравнение вариантов решений производим относительно нескольких характеристик системы, важных с точки зрения проектирования, путем сравнения определенных (для каждого варианта) значений соответствующих показателей качества qi. Принимаем несколько показателей качества. В данной ситуации целесообразно применять следующие показатели качества: массогабаритные показатели, надежность, расход энергии, потери, стоимость и плавность регулирования. Каждому из этих показателей присваиваем определенный максимальный бал, то есть определяем так называемый для каждого показателя весовой коэффициент
набранных каждым из вариантов, и выбираем тот вариант, который имеет наибольший суммарный балл. Оценочная диаграмма сравнения вариантов решения представлена в графической части проекта и на рисунке 1.3
В результате получили следующее распределение баллов по вариантам:
S1=4*5+5*4+4*4+4*3+5*4+2*5 = 98;
S2=5*5+4*4+4*4+3*3+2*4+5*5 = 99.
По результатам сравнения видно, что суммарный балл у двух систем регулирования: двигатель постоянного тока последовательного возбуждения с изменением сопротивления в обмотке возбуждения и асинхронный двигатель с фазным ротором с импульсно-ключевым регулированием по цепи ротора не сильно отличается. Однако повышение требований к крановым электроприводам массового применения ставит задачи значительного улучшения их технико-экономических показателей без существенного увеличения стоимости и усложнения конструкции. Основным направлением решения данных задач является применения средств полупроводниковой техники в традиционных системах в цепях повышения коммутационной устойчивости контакторно-контроллерной аппаратуры и реализации более рациональных режимов регулирования и торможения. Поэтому выбираем систему асинхронный двигатель с фазным ротором с импульсно-ключевым управлением по цепи ротора.
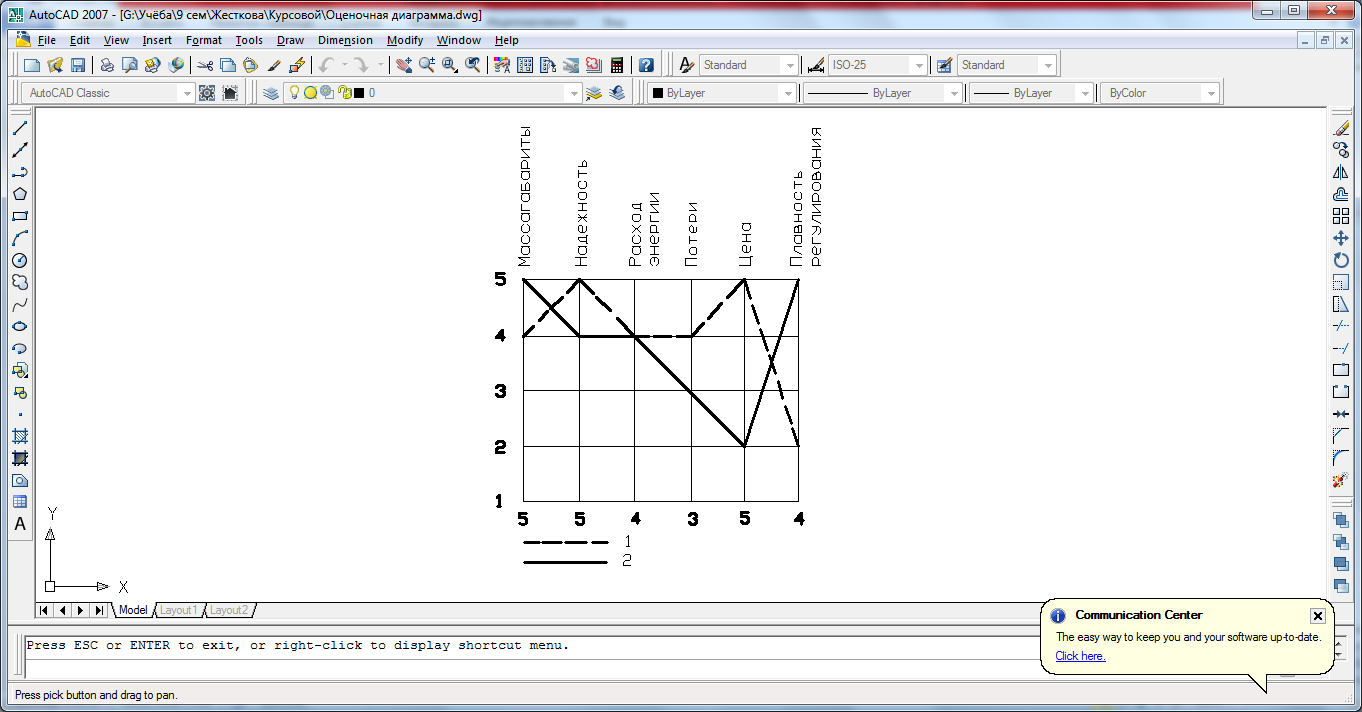
Рисунок 1.3 – Оценочная диаграмма сравнения вариантов решения электропривода механизма передвижения тележки
1.2.2 Расчет мощности и выбор приводных электродвигателей. Для выбора электродвигателя необходимо рассчитать его мощность. Воспользуемся для этого методом эквивалентного момента. Определим статический момент тележки при движении с грузом:
 (1.35)
(1.35)где:
Согласно (1.35):

Момент статический при движении тележки без груза:
 (1.36)
(1.36)Согласно (1.36):

Момент двигателя при пуске с грузом:
Согласно (1.37):
Момент двигателя при торможении с грузом:
Согласно (1.38):
Момент двигателя при пуске без груза:
где:
Согласно (1.40):
Согласно (1.39):
Момент двигателя при торможении без груза:
Согласно (1.41):
Для построения нагрузочной диаграммы необходимо определить время пуска и торможения: