Файл: 1 Техническая часть 1 Техническая характеристика механизма передвижения тележки.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 121
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1.1 Техническая характеристика механизма передвижения тележки
Что касается кинематической схемы, то она представлена на рисунке 1.2, где
1.1.5 Технические требования к ЭП и схеме управления механизма передвижения тележки
Кн =1,25 коэффициент неравномерности распределения нагрузки на колеса.
- --
1 Техническая часть
1.1 Техническая характеристика механизма передвижения тележки
1.1.1 Технологическое назначение. Механизм передвижения тележки предназначен для перемещения грузозахватывающего устройства вдоль моста. Крановая тележка состоит из рамы с ведущими и ведомыми колесами. На раме устанавливаются механизмы передвижения тележки и подъема груза. Краны большой грузоподъемности оборудуются двумя механизмами подъема. Один из них (миньшей грузоподъемности) является вспомогательным. Питание электродвигателей осуществляется по цеховым троллеям. Для подвода электроэнергии применяют токосъемы скользящего типа, прикрепленные к металлоконструкции крана. В современных конструкциях мостовых кранов токопровод осуществляется с помощью гибкого кабеля. Устанавливается тележка на четыре колеса, два из которых ходовых, в кранах грузоподъемностью до 50 тонн, а в кранах свыше 50 тонн тележка может иметь до 16 колес. Общий вид тележки мостового крана представлен на рисунке 1.1..
Рисунок 1.1 – Общий вид тележки мостового крана
1.1.2 Краткое описание принципа работы и кинематической схемы. Тележка движется по рельсовому пути на всю длину моста от одного крайнего положения до другого. За начальное состояние тележки принимается нахождение ее в одном из крайних положений на мосте при поднятом грузе. Из этого положения тележка разгоняется с грузом, движется до противоположного конца моста и там останавливается. После остановки тележки цикл передвижения тележки заканчивается.
Что касается кинематической схемы, то она представлена на рисунке 1.2, где
1 – электродвигатель; 2 – тормоз; 3 – муфта упругая втулочно-пальцевая; 4 – редуктор; 5 – муфта зубчатая; 6 – ходовое колесо; 7 – рельс.
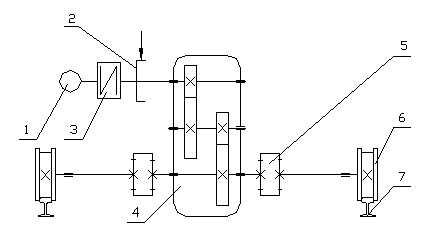
Рисунок 1.2 - Кинематическая схема механизма передвижения тележки
1.1.3 Основные технические параметры механизма передвижения тележки. Основные технические параметры механизма приведены в таблице 1.1.
Таблица 1.1 - Основные технические параметры механизма
| № | Наименование параметров | Данные | ||
| 1 | Грузоподьемность подьема , т. | 25 | ||
| 2 | Масса тележки ,т | 15 | ||
| 3 | Пролет крана ,м | 22,5 | ||
| 4 | Скорость передвижения тележки, м/мин | 40 | ||
| 5 | ПВ% электродвигателя | 43 | ||
Продолжение Таблицы 1.1:
| 6 | Режим работы | СТ |
| 7 | Цех | Литейный |
1.1.5 Технические требования к ЭП и схеме управления механизма передвижения тележки
1.1.5.1 Технические требования к силовой части ЭП механизма передвижения тележки. Требования к электроприводу перемещения тележки:
1) простота эксплуатации, высокая надежность работы, следствие массовости применения и весьма тяжелых условия работы.
2) ЭП должен обладать достаточным быстродействием;
3) ЭП должен обеспечивать регулирование скорости в необходимом диапазоне;
4) ЭП должен обеспечивать все режимы работы тележки;
5) реверсивный;
6) ЭП должен обеспечивать ограничение параметров: момента и тока, допустимыми значениями в переходных процессах и при механических перегрузках;
7) ЭП должен обеспечивать регулирование скорости в необходимом диапазоне, исходя из расчета точной остановки (расчет приведен в разделе 1.1.5.2).
1.1.5.1 Технические требования к схемам управления ЭП механизма передвижения тележки. В схемах управления необходимо применять следующие блокировки:
1) в схеме должна быть блокировка, отключающая всю систему питания крана. если требуется нахождение человека на поверхности тележки или моста;
2) в схеме необходимо предусмотреть невозможность пуска электродвигателя после восстановления напряжения в момент, когда командоаппарат еще находится в каком-либо рабочем положении. Пуск должен быть возможен только после возвращения командоаппарата в нулевое положение;
3) должен осуществляться контроль за положением рабочего органа с помощью концевых выключателей, если срабатывает концевой выключатель двигатель должен отключаться, движение в данном направлении не возможно.
В САУ надо предусмотреть следующие защиты:
1) от токов короткого замыкания;
2) от пропадания напряжения в сети.
К схемам управления кранами предъявляются следующие требования:
1) пуск двигателя должен производиться по определенному закону;
2) при полном отключении питания двигателя в схеме должно быть предусмотрено механическое торможение;
3) при резком переводе рукоятки командоаппарат из положения «вперед» в положение «назад» надо предусмотреть автоматическое плавное реверсирование двигателя с токами, не превышающими допустимые;
4) система автоматического управления должна иметь простую структурную схему.
Диапазон регулирования скорости ЭП механизмов перемещения определяется из расчета точной остановки тележки, поэтому предварительно необходимо рассчитать параметры точного останова [2].
При расчете воспользуемся следующими допущениями:
1) момент инерции вращающихся масс механизма 0,5 момента двигателя: JM=0,5JДВ;
2) коэффициент полезного действия передачи η=0,85;
3) момент механического тормоза при остановке с минимальной скоростью равным моменту динамическому при пуске: МТ=МДИН;
4) ускорение при пуске примем равным : а=0,3 м/с2;
Зададимся номинальной скоростью вращения двигателя: n=935 об/мин. Переведем скорость из об/мин в рад/с:
где: n – скорость вращения двигателя, об/мин.
Согласно (1.1) получаем:
Определим угловую скорость колеса:
где: DК – диаметр колеса, м;
VТ – линейная скорость перемещения тележки, м/с.
Для определения диаметра колеса необходимо рассчитать максимальную статическую нагрузку:
где Gг, Gт вес номинального груза главного подъема и тележки соответственно, кг;
Z число колес;
Кн =1,25 коэффициент неравномерности распределения нагрузки на колеса.
Согласно (1.3) получаем:
По ГОСТ 2864890 выбираем при нагрузке от 200 до 250 кН диаметр ходового колеса Dк = 700 мм.
По формуле (1.2) определяем угловую скорость колеса:
Передаточное число редуктора:
Согласно (1.5):
Радиус приведения:
(1.6)
Согласно (1.6):
Суммарный момент инерции:
где: mгр – номинальная масса груза, кг;
mт – масса тележки, кг;
КЗ – коэффициент запаса, КЗ=1.3.
Согласно (1.7):
Угловое ускорение:
где: a – линейное ускорение тележки, м/с2.
Согласно (1.8):
Допустимый момент при торможении:
Согласно (1.9):
Максимальное сопротивление от трения:
где: КРД – коэффициент, учитывающий трение реборд о рельсы, КР=2,5;
f – коэффициент трения качения (для катков диаметром 600 – 700 мм f =0,8*10-3);
µ - коэффициент трения скольжения, µ=0,06; [3]
DЦ – диаметр цапфы,Dц=0,08.
Согласно (1.10):
Минимальное сопротивление от трения:
Согласно (1.11):
Максимальное сопротивление от уклона путей:
где: ψ – угол уклона пути, ψ=0,002.
Согласно (1.12):
Минимальное сопротивление от уклона путей:
Согласно (1.13):
Полное статическое сопротивление передвижению тележки от статических нагрузок: