Файл: Проект модернизации главного привода токарного патронноцентрового станка на базе станка с чпу модели 2А135.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 266
Скачиваний: 5
СОДЕРЖАНИЕ
-к сокращению штучного времени;
-повышение точности обработки и формообразования;
-высокий КПД главных и вспомогательных механизмов (приводов).
вида модернизированного станка; кинематической схемы; шпиндельного узла; коробки скоростей.
также автоматически устанавливать необходимые режимы обработки с учетом изменяющихся условий.
вида модернизированного станка; кинематической схемы; шпиндельного узла; коробки скоростей.
1. Описание устройства и работы станка-прототипа и основных его узлов
1.1. Назначение и краткое описание станка
1.2. Технические данные и характеристика станка
1.3. График частот вращения привода главного движениябазового станка и ее описание
1.4. Кинематическая схема привода главного движениябазового станка и ее описание
2 Техническое предложение на проектируемый станок
2.1. Основные условия и исходные данные для разработки
2.2 Определение базовых межосевых расстояний и условияих сохранения в разрабатываемом приводе
2.3 Выбор типа электродвигателя и его характеристик
2.4. Построение графика частот вращения приводас бесступенчатым регулированием
2.6. Построение графика мощности на шпинделе
2.3 Выбор типа электродвигателя и его характеристик
 В каталоге асинхронных двигателей
В каталоге асинхронных двигателей  [2] выбираем электродвигатель, с номинальной мощностью в режиме
[2] выбираем электродвигатель, с номинальной мощностью в режиме  близкой к заданной и самой меньшей частотой вращения с постоянной мощностью
близкой к заданной и самой меньшей частотой вращения с постоянной мощностью  , в режиме :
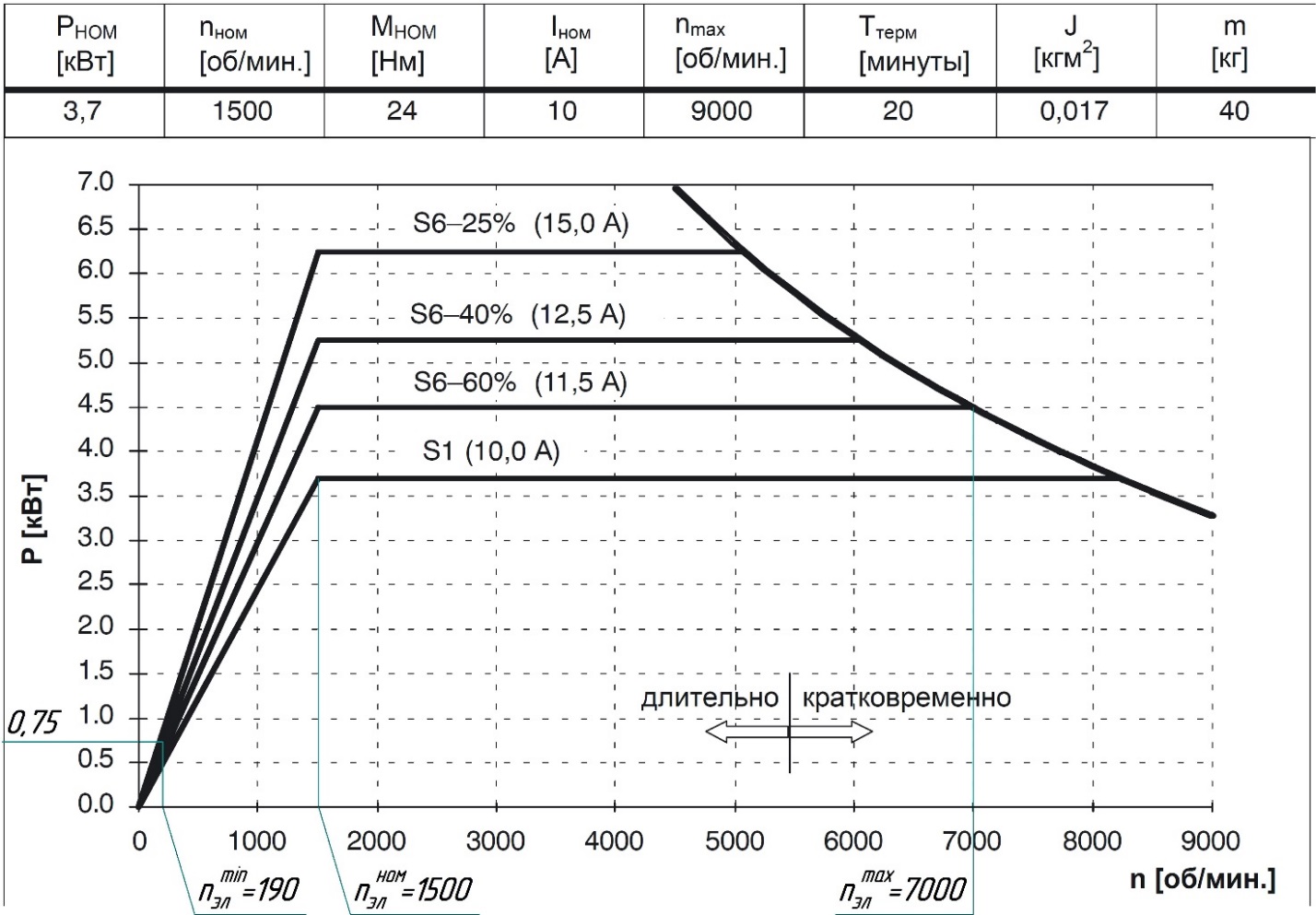
, в режиме : двигатель 1PH7101-NF характеристики которого показаны на рис. 5.
Рис. 5. Зависимость мощности электродвигателя от частоты вращения
Определяем диапазон регулирования частот вращения электродвигателя с постоянной мощностью по формуле 3.1 [1]:
Минимальная частота вращения электродвигателя по формуле 3.2 [1]:

Принимаем
 и отмечаем это значение на графике
и отмечаем это значение на графике (рис. 6). На этой частоте вращения двигатель будет развивать мощность
 , в чем легко убедится при помощи графика рис 5.
, в чем легко убедится при помощи графика рис 5.Диапазон регулирования электродвигателя с постоянным моментом составит (формула 3.3 [1]):
а его общий диапазон регулирования (формула 3.4 [1]):

2.4. Построение графика частот вращения привода
с бесступенчатым регулированием
Последовательность построения графика
1. Принимаем количество валов для бесступенчатого привода таким же, как и в ступенчатом базовом приводе базового станка (рис. 3), т.е. 5.
2. Выписываем числа стандартного ряда частот вращения шпинделя со знаменателем
 (прил. Б [1]). Всего 40 значений начиная с 1
(прил. Б [1]). Всего 40 значений начиная с 1  и заканчивая 9500
и заканчивая 9500
.
При окончательном оформлении графика часть лишних нижних частот вращения удаляется.
3. Строим сетку будущего графика в виде 5 вертикальных линий – валов и 40 горизонтальных линий – частот вращения валов привода.
Напротив вала шпинделя (
 вал) наносятся частоты вращения от 1 до 9500
вал) наносятся частоты вращения от 1 до 9500  , а на валу электродвигателя отмечаются
, а на валу электродвигателя отмечаются  ,
, и
и  . На рис. 6 частоты вращения 1…4,5 не обозначены, т.к. после построения графика они были удалены за ненадобностью.
. На рис. 6 частоты вращения 1…4,5 не обозначены, т.к. после построения графика они были удалены за ненадобностью.При этом частоты вращения, которые не равны значениям стандартного ряда, отмечаются на графике в середине интервалов.
4. Назначаем места расположения групповых и одиночных передач в разрабатываемом приводе.
Из задания следует, что число ступеней частот вращения, обеспечиваемое механикой бесступенчатого привода, должно быть равно
 . Значит, в коробке скоростей необходим только один тройной блок шестерен.
. Значит, в коробке скоростей необходим только один тройной блок шестерен.В базовой коробке установлено два тройных блока расположенных на
 и
и  валах. Лучи тройного блока на валу имеют наибольший наклон. Поэтому в нашем случае тройной блок следует оставить на валу, а одиночную передачу смонтировать между и
валах. Лучи тройного блока на валу имеют наибольший наклон. Поэтому в нашем случае тройной блок следует оставить на валу, а одиночную передачу смонтировать между и  валами взамен базового тройного блока.
валами взамен базового тройного блока.5. Наносим на графике лучи линии минимальной редукции привода, соединяющий частоты
 и
и  . Величина пока неизвестна, и поэтому нанесение лучей состоит из предварительного и окончательного этапов.
. Величина пока неизвестна, и поэтому нанесение лучей состоит из предварительного и окончательного этапов.Лучи передаточных отношений понижающих пар между соответствующими валами предварительно наносятся на график. Наклон этих лучей должен быть таким же, как и на графике частот вращения базового привода. Следует заметить, что в нашем случае в базовом приводе
 , поэтому для перевода значений
, поэтому для перевода значений  необходимо использовать данные приведенные в табл. 2.
необходимо использовать данные приведенные в табл. 2.Таблица 2
| | Количество интервалов | |||||||
| 1,41 | 0,5 | 1 | 1,5 | 2 | 2,5 | 3 | 3,5 | 4 |
| 1,26 | 1 | 1,5 | 2 | 3 | 3,5 | 4,5 | 5 | 6 |
| Передаточные отношения | ||||||||
 |  | 0,71 |  | 0,5 |  | 0,355 |  | 0,25 |
При наличии в приводе ременных передач из передаточные отношения
(а, значит, и наклон лучей) на начальном этапе построения графика следует принимать равными базовым, принимая во внимание табл. 2.
6. Наносим лучи повышающих передач, входящих в состав групповых зацеплений. При этом передаточные отношения повышающих передач следует принимать максимально большей величины на основе неравенства:

7. на завершающей стадии построения графика производим его коррекцию с целью обеспечения заданной частоты вращения
 . При наличии в приводе ременных передач это осуществляется изменением в допустимых пределах их передаточных отношений. При отсутствии ремней коррекция производится изменением передаточных отношений одиночных зубчатых пар.
. При наличии в приводе ременных передач это осуществляется изменением в допустимых пределах их передаточных отношений. При отсутствии ремней коррекция производится изменением передаточных отношений одиночных зубчатых пар.Порядок построения графика

Это ременная передача. Используем передаточное отношение
 . Соответственно на II валу предельные значения частот вращения с постоянной мощностью составят:
. Соответственно на II валу предельные значения частот вращения с постоянной мощностью составят:

Отмечаем эти частоты вращения на графике. При этом точка 803 отмечается в середине интервала 750-950.

Заменяем тройной блок шестерен одиночной понижающей передачей. В базовом станке наименьшее передаточное отношение
 соответствует 3 интервалам (рис. 4). Поэтому из точек 3500 и 750 проводим лучи, ниспадающие на 4,5 интервала (в соотв. с табл. 2). На III валу эти лучи определят 2 точки: 1320 и 300 об/мин.
соответствует 3 интервалам (рис. 4). Поэтому из точек 3500 и 750 проводим лучи, ниспадающие на 4,5 интервала (в соотв. с табл. 2). На III валу эти лучи определят 2 точки: 1320 и 300 об/мин.
Здесь устанавливается одиночная понижающая передача. Принимаем ее передаточное отношение равным базовому
 . Проводим лучи из точек 1320 и 300 об/мин вниз на 1,5 интервала (в соотв. с табл. 2). На IV валу эти лучи определят 2 точки: 950 и 212 об/мин.
. Проводим лучи из точек 1320 и 300 об/мин вниз на 1,5 интервала (в соотв. с табл. 2). На IV валу эти лучи определят 2 точки: 950 и 212 об/мин.
Как и в базовом станке здесь устанавливается тройной блок шестерн и поэтому из точек 950 и 212 об/мин обозначенных на IV валу исходят по три луча передаточных отношений.
Понижающие передаточные отношения
 и
и  берем из базового станка. Проводим лучи в соответствии с табл. 2. Лучи повышающей передачи с целью получения наибольшего диапазона регулирования проводим вверх на пределе возможно, т.е. через 3 интервала. Таким образом частоты вращения на V валу составят: 1900, 670, 235, 425, 150 и 53 об/мин.
берем из базового станка. Проводим лучи в соответствии с табл. 2. Лучи повышающей передачи с целью получения наибольшего диапазона регулирования проводим вверх на пределе возможно, т.е. через 3 интервала. Таким образом частоты вращения на V валу составят: 1900, 670, 235, 425, 150 и 53 об/мин.
Наносим на графике штриховую линию, которая позволит определить минимальную частоту вращения шпинделя. Лучи этой линии проводятся из точки
 об/мин параллельно лучам линии, соединяющей отметки частот вращения
об/мин параллельно лучам линии, соединяющей отметки частот вращения  и
и 
об/мин.

Диапазон регулирования частот вращения шпинделя с постоянным моментом на графике частот вращения определяется автоматически

Диапазон регулирования с постоянной мощностью определяется отношением:
Полный диапазон регулирования частот вращения на шпинделе составит:

У базового станка (рис. 3) пределы частот вращения шпинделя составляют
 и
и  об/мин. Соответственно диапазон регулирования частот в базовом ступенчатом приводе составит
об/мин. Соответственно диапазон регулирования частот в базовом ступенчатом приводе составит  , что существенно меньше
, что существенно меньше  , но и
, но и  в разработанном бесступенчатом приводе. Очевидно, что в новом приводе диапазон регулирования частот вращения шпинделя с постоянной мощностью превосходит базовый более чем в два раза (
в разработанном бесступенчатом приводе. Очевидно, что в новом приводе диапазон регулирования частот вращения шпинделя с постоянной мощностью превосходит базовый более чем в два раза ( . Это позволит существенно расширить технологические возможности станка после его модернизации, повысить производительность и эффективность обработки. Также следует отметить, что практически 45% верхней части диапазона с постоянным моментом (в нашем случае, начиная с 53…1900 об/мин) является рабочей, так как на малых частотах вращения шпинделя полная мощность двигателя в универсальных станках обычно не используется.
. Это позволит существенно расширить технологические возможности станка после его модернизации, повысить производительность и эффективность обработки. Также следует отметить, что практически 45% верхней части диапазона с постоянным моментом (в нашем случае, начиная с 53…1900 об/мин) является рабочей, так как на малых частотах вращения шпинделя полная мощность двигателя в универсальных станках обычно не используется.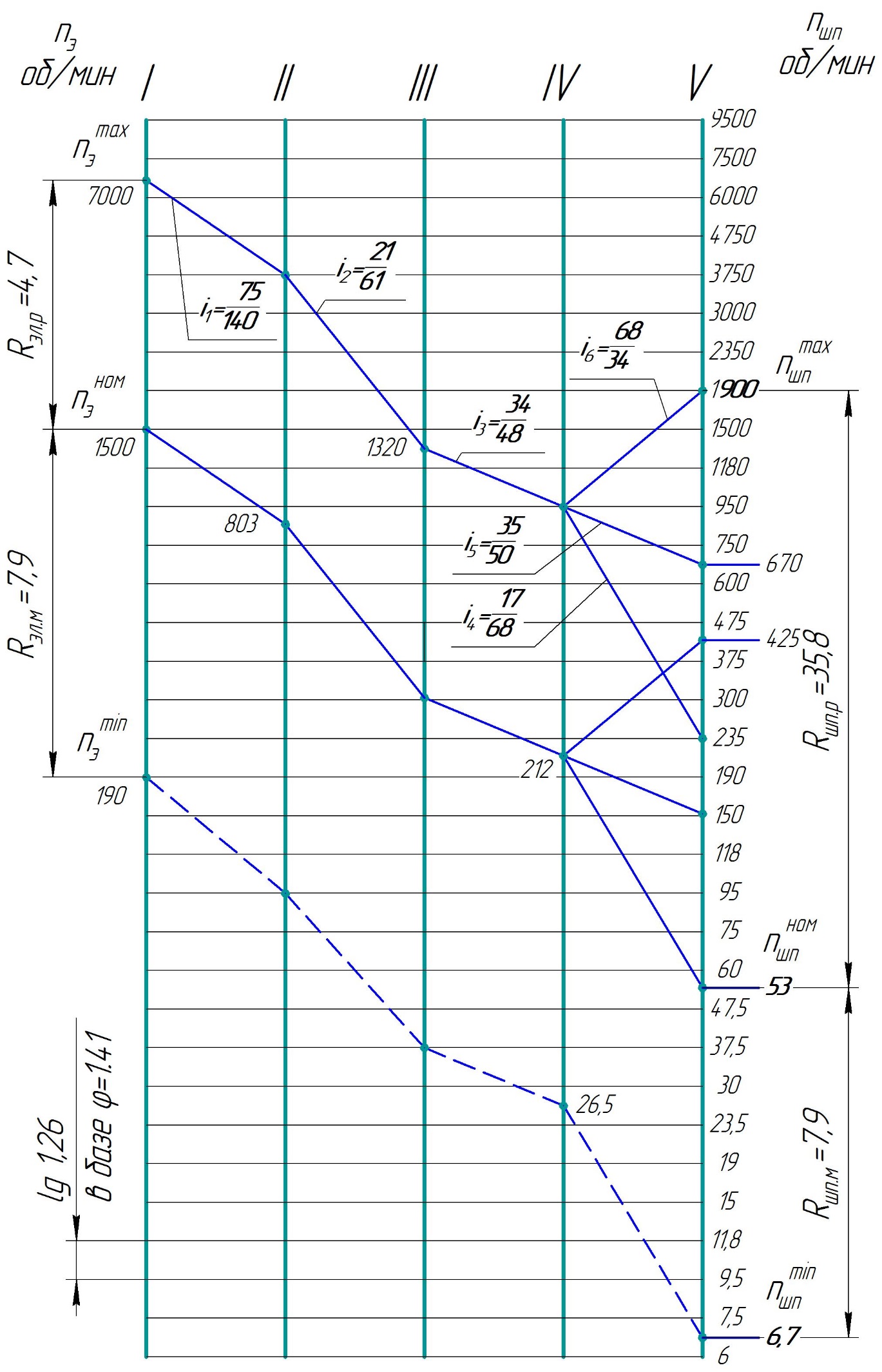 Рис. 6. График частот вращения бесступенчатого привода главного движения станка мод. 2А135
Рис. 6. График частот вращения бесступенчатого привода главного движения станка мод. 2А1353Выбор основных геометрических параметров станка
Построение кинематической схемы привода главного движения с бесступенчатым регулированием производится на основе кинематики привода базового станка (рис. 4) при помощи разработанного графика частот вращения (рис. 6). В первую очередь должны быть нанесены расстояния между осями валов, заимствованные из базового привода. Диаметры начальных окружностей зубчатых колес и диаметры шкивов должны строго соответствовать выбранному масштабу.